
Электронные стражи Альбиона: самонаводящиеся торпеды «Боулер», «Трампер» и «Дилер»

Электронные стражи Альбиона: самонаводящиеся торпеды «Боулер», «Трампер» и «Дилер»
Содержание:
Работу над акустическими самонаводящимися торпедами британский флот начал еще до войны. Развитие гидроакустики и средств акустического поиска субмарин в предвоенный период, естественным образом вызвали вопрос: “а можно ли оснастить этим торпеду, чтобы она сама искала цель?” Для ответа на этот вопрос, флот поручил акустическим лабораториям в Гринлоке и Файрли провести замеры шума корабля на предполагаемой дистанции обнаружения и сравнить их с шумами самой торпеды. Таким образом, флот пытался оценить перспективность пассивного акустического самонаведения.
Исследования дали несколько обескураживающий результат: мало-мальски эффективная дистанция обнаружения корабля акустикой торпеды достигалась только при скорости торпеды менее 20 узлов. Виной тому была сильная шумность поршневых двигателей британских торпед. В отличие от германского, итальянского и американского флотов, британский флот не проявлял интереса к турбинным или электрическим торпедам, и поэтому не имел под рукой ничего “малошумного”. Хотя и 20-узловая самонаводящаяся торпеда потенциально могла иметь определенное применение, в существующие доктрины Королевского Флота она совершенно явно не вписывалась, и исследовательскую программу закрыли. По ряду данных, наработки по программе были в 1941 переданы в США.
Тем не менее, преимущества акустических торпед были вполне очевидны, и британская программа разработки не прекратилась, а просто сменила цель. Разочаровавшись в возможностях пассивного самонаведения (при котором торпеда наводилась на шум цели), британцы обратились к активному (при котором торпеда наводилась на отраженное от цели эхо излученного акустического сигнала).
Bowler
Весной 1942 года, Королевский Флот инициировал программу разработки акустической самонаводящейся авиационной торпеды, названной “Боулер” (англ. Bowler). Мотивация для ее создания была, впрочем, несколько неожиданной: снижение уязвимости самолетов-торпедоносцев. В ходе военных действий, британские моряки пришли к выводу, что самым безопасным направлением подхода для их медлительных бипланов-торпедоносцев является заходить на цель с носа или кормы, в тех секторах, где по ним могло стрелять меньше всего зениток. Однако, вероятность попадания авиаторпедой при заходе на цель с носа или кормы резко падала.
Британские моряки решили, что выходом из ситуации может быть создание самонаводящейся торпеды, которая, будучи сброшенной по носу или по корме неприятельского корабля, самостоятельно найдет цель. Однако, создать такое оружие было непросто. Поскольку речь шла о перехвате цели на весьма острых курсовых углах, пассивное акустическое самонаведение (при котором торпеда просто слушала шумы цели) было бы неэффективно. Проблему надо было решать как-то иначе.
Электрическая схема торпеды «Боулер»
По замыслу его конструкторов, “Боулер” должен был стать первой в мире активной самонаводящейся торпедой. Два кварцевых звукоизлучателя, установленных в его носовой части, излучали импульсы продолжительностью 2 миллисекунды на частоте 26,7 килогерц перпендикулярно продольной оси торпеды. В промежутке между импульсами, 3-дюймовые кварцевые гидрофоны, установленные снаружи корпуса, вслушивались в эхо. Если с какой-либо стороны приходило эхо отраженного (от корабля противника) сигнала, то в системе управления замыкалось реле, руль торпеды перекладывался посредством подрыва пиропатрона (!) в пневматическом цилиндре и фиксировался в крайнем положении. Торпеда начинала выписывать циркуляцию в сторону цели. Строго говоря, эту систему нельзя назвать в полной мере самонаведением, поскольку она всего лишь подавала одну-единственную команду — на переход торпеды от прямолинейного движения к правой или левой циркуляции.
Согласно расчетам, торпеда могла услышать отраженное от цели эхо сигнала на дистанции до 90 метров. Это означало, что для того, чтобы добиться попадания, торпедоносцам нужно будет всего лишь добиться прохода “Боулера” в 90 метрах от цели. При атаке, например, линкора типа “Бисмарк”, это давало ширину “коридора сброса” в 90+36+90=216 метров! Вполне привлекательная перспектива.
Схема применения «Боулера» против линкора типа «Бисмарк» (сверху-вниз, фазы атаки)
Летчикам новая идея весьма понравилась, но вот инженеры были не слишком-то оптимистичны. Более тщательные расчеты в ходе проектирования показывали, что торпеда может быть эффективно использована только при атаке с носа, с острых курсовых углов. Атаковать корабли с кормы оказалось невозможно – сильные шумы от винтов цели сбивали с толку гидрофоны торпеды. Атаки с носа были эффективны только в пределах весьма узкого угла в 10 градусов от курса цели. Наконец, ввиду недостаточной избирательности гидрофонов и самого принципа наведения, любой сильный посторонний шум мог сбить торпеду с толку. Противник мог отклонить торпеды, например, взрывая за бортом глубинные заряды – и кроме того, при одновременном сбросе нескольких торпед, детонация первой наверняка сбила бы с курса все остальные.
Даже с такими ограничениями, моряки были полны энтузиазма в отношении “Боулера”, но министерство решило иначе. Шел 1942 год, Вторая Мировая достигла своего пика. Британские ограниченные ресурсы были растянуты до предела. В подобной ситуации, командование решило, что создание нового оружия со столь ограниченными возможностями себя не оправдывает. Хотя моряки настаивали, что иметь какое-нибудь самонаводящееся оружие лучше, чем не иметь никакого, решение было не в их пользу, и проект “Боулер” был закрыт.
Trumper
Хотя программа “Боулер” и не дала ожидаемого результата, наработки по ней не пропали впустую. Командование флота убедилось в работоспособности концепции акустической самонаводящейся торпеды, и отказ от “Боулера” означал лишь, что адмиралы хотели вкладывать средства в более совершенное оружие.
Практически сразу после закрытия проекта “Боулер”, флот инициировал программу “Трампер” (англ. Trumper). В этот раз идея состояла в оснащении системой активного акустического самонаведения стандартных 21-дюймовых (533-мм) торпед Mark VIII и Mark IX, использовавшейся для вооружения подводных лодок и эсминцев соответственно. Эти торпеды отличались большой дальностью хода, но и значительной шумностью, и создание эффективной системы акустического самонаведения для них было изрядной головоломкой. Эскизный проект “Трампера” был подготовлен в начале 1943 года.

Снаряжение торпедного аппарата 21-дюймовой торпедой Mark VIII
На этот раз, система наведения была продумана куда более тщательно. На специально укороченный нос торпеды Mark VIII надевался заполненный маслом куполообразный обтекатель, в котором размещалась пара кварцевых акустических излучателей и система кварцевых приемников. Работая каждый в пределах угла в 30 градусов, оба излучателя формировали единый поисковый луч примерно в 60 градусов шириной, посылая сигналы продолжительностью в 1-3 миллисекунды с интервалами в 1 секунду. Встретившись с целью, сигналы отражались и возвращались обратно к торпеде. Система приемников, расположенных дугой внутри обтекателя, определяла направление, с которого поступало эхо, сравнивая принятые сигналы по амплитуде.
Система самонаведения была устроена так, чтобы удерживать цель на внешней границе поискового луча, на курсовом угле примерно в 30 градусов при непрерывно уменьшающейся задержке между сигналом и ответом (т.е. использовалось сближение при постоянном угле визирования). Когда приемные устройства принимали отраженное эхо от цели, их выходные сигналы сопоставлялись по амплитуде логическим контуром торпеды. Наиболее сильный сигнал приводил в действие соответствующее исполнительное реле, подающее питание на электромоторы, отклоняющие рамку гироскопа “Трампера” (и, следовательно, перо управляемого гироскопом руля) на 7 градусов в том или ином направлении. Торпеда поворачивала до тех пор, пока наибольший по амплитуде сигнал не оказывался исходящим от самого крайнего приемника с соответствующего борта – что соответствовало курсовому углу на цель в 30 градусов. Такая схема самонаведения давала торпеде определенную устойчивость к буксируемым ловушкам-обманкам (британцы тщательно изучили недостатки немецких акустических торпед, и сделали выводы), и шуму винтов цели. Кроме того, она увеличивала вероятность попадания. Оказавшись в 150-160 метрах от цели – когда задержка между отправкой сигнала и приемом эха становилась минимальной — торпеда выполняла автоматический поворот на 40 градусов в сторону цели, с таким расчетом, чтобы нанести удар в борт на циркуляции. Такая схема атаки практически исключала вероятность, что торпеда может промахнуться на остром курсовом угле.
Принципиальная схема управления «Трампера»
Работы над “Трампером” шли успешно, и зимой 1943-1944 торпеда поступила на испытания. Выявившиеся недостатки потребовали внести определенные изменения в прототип, что затянуло работы примерно на год. Тем не менее, в итоге все проблемы были успешно решены, и в начале 1945 года торпеду одобрили к принятию на вооружение. В сентябре 1945, “Трампер” уже проходил сдаточные испытания на боевых кораблях, когда Япония капитулировала, и прямая необходимость в торпеде отпала. Программу перевели в разряд исследовательской, а уже заказанные серийные торпеды использовали как для отработки концепции активного акустического самонаведения, так и для защиты от подобного оружия. В 1945-1946, помимо стандартных торпед Mark VIII и Mark IX, “Трамперизированной” головкой самонаведения оснастили и новейшую электрическую Mark XI.
Dealer
Предыдущие две торпеды предназначались для поражения надводных кораблей. Однако, британцы совершенно не собирались забывать и про угрозу со стороны подводных лодок. Поисковые радары, прожекторы и НУРС’ы достаточно успешно решили вопрос уничтожения авиацией субмарин в надводном положении. Однако, уничтожение с воздуха погрузившихся субмарин все еще было проблематично. Акустическая торпеда – способная самостоятельно найти цель, положение которой известно лишь приблизительно – представлялась идеальным решением.

Первая в своем роде: американская противолодочная самонаводящаяся торпеда Mark 24 FIDO
В 1942 году, командир торпедоносной эскадрильи Сент-Джон и двое флотских офицеров из командования технической подготовки (TTC) попытались адаптировать концепцию “Боулера” к противолодочному оружию. Официальной поддержки проекта им добиться не удалось, но никто и не запрещал офицерам заниматься разработкой в свое свободное время. Им удалось спроектировать и успешно испытать электрическую схему, способную справиться с задачей наведения управляемой торпеды в трех плоскостях путем сопоставления фазового сдвига в сигналах от гидрофонов. На этой стадии, проект привлек внимание коммодора Робинсона, из Центра Торпедных Испытаний (TEE), который присоединился к группе Сент-Джона и выполнил разработку механической части управления. Проект получил название “Джокер” (англ. Joker) и первоначально рассматривался как система самонаведения для стандартной 18-дюймовой авиаторпеды Mark XV.
По мере работы над “Джокером”, инженерам стало ясно, что активное самонаведение (на доступном техническом уровне, конечно) не способно эффективно решить задачу из-за недостаточной дальности обнаружения. Для противолодочной торпеды было важно иметь возможность самостоятельно искать цель, положение которой известно только приблизительно. Дальность работы активного самонаведения была ограничена дальностью, на которой гидрофоны могли услышать отраженное от цели эхо сигнала. Пассивное самонаведение, использующее в качестве источника сигнала саму подводную лодку, было менее точным, но могло работать на существенно больших дистанциях.
В 1943, проект “Джокер” разделили на две программы: одна группа инженеров продолжила работу над торпедой с активным самонаведением, вторая переключилась на разработку торпеды с пассивным самонаведением. Первая программа в скором времени слилась с описанным выше проектом “Трампер”, вторая же получила новое обозначение “Дилер” (англ. Dealer). Концепцию проекта также пересмотрели: от использования в качестве “шасси” торпеды Mark XV решили отказаться. Противолодочной торпеде не требовалась особая скорость хода и связанные с ней значительные габариты, а вот шумность двигателя желательно было свести к минимуму. Британцам к этому моменту было уже известно об американской пассивной противолодочной торпеде Mark 24 FIDO – электрической, сбрасываемой на парашюте – и адмиралы решили, что “Дилер” должен быть аналогичным по концепции оружием.
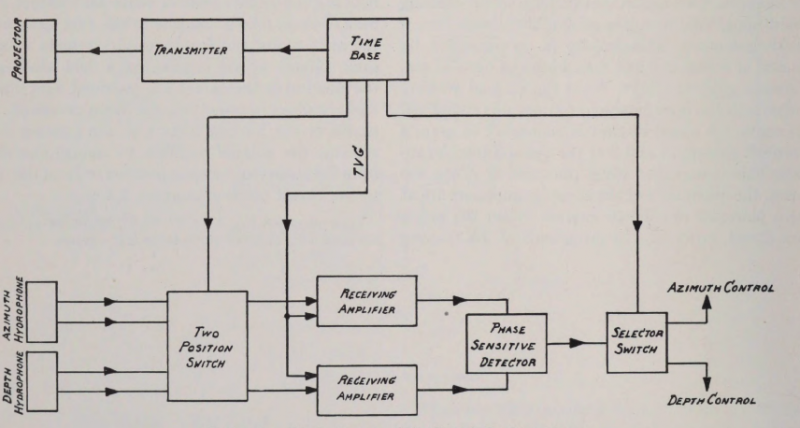
Вариант «Дилера» с активной системой наведения
Результатом их работы стала короткая, “полная” торпеда, наводившаяся на цель при помощи двух пар кварцевых гидрофонов в ее носовой части. Одна пара располагалась вертикально, вторая – горизонтально, для наведения в вертикальной и горизонтальной плоскости, соответственно. Сигналы от гидрофонов в каждой паре усиливались стандартным ламповым усилителем и поступали на логический контур, сравнивающий их фазы. Если фазы сигналов с обеих гидрофонов совпадали, это означало что торпеда в данной плоскости ориентирована прямо на цель. Если же фазы не совпадали, то срабатывало исполнительное реле, приводившее в действие систему управления.
“Дилер” имел весьма необычную, динамическую систему управления. В отличие от большинства торпед он был двухвинтовым, причем оба винта приводились в действие отдельными электромоторами. Руля направления у торпеды не было; маневрирование по горизонтали осуществлялось регулировкой мощности, поступающей на каждый электродвигатель. Руль глубины также отсутствовал, маневрирование по вертикали выполнялось смещением центра тяжести торпеды вперед или назад – путем передвижения по специальным направляющим тяжелой аккумуляторной батареи. Если “Дилеру” нужно было всплыть, батарея смещалась назад, торпеда поднимала нос и работа моторов толкала ее к поверхности. Если же торпеде нужно было погрузиться, батарея смещалась вперед, нос опускался, и работа моторов уводила торпеду на глубину.
Сброшенный с самолета, “Дилер” двигался по раскручивающейся спирали, до тех пор, пока его гидрофоны не улавливали бы шум винтов цели. После чего торпеда автоматически ориентировала себя на цель в двух плоскостях и начинала преследование. Скорость торпеды достигала 15 узлов, а дальность хода – порядка 5-6 км. Высокая маневренность торпеды делала ее опасным противником даже для германских быстроходных субмарин Тип XXI.
Разработка торпеды, вполне естественно, изрядно затянулась. Британский флот не имел никакого опыта работы с электрическими торпедами, и вынужден был решать многие вопросы с нуля. Сказывалось и снижение подводной угрозы в 1944-1945 годах. Массовый ввод в строй новых эскортных кораблей, патрульных самолетов, совершенствование радаров, гидроакустики и противолодочного оружия заставили “волчьи стаи” Денница, поджав хвосты, попрятаться по гаваням. Непрерывно ужесточавшиеся бомбардировки германских портов, воздушные минные постановки на Балтике, острая нехватка ресурсов и коллапс промышленности окончательно поставили некогда грозные силы Кригсмарине на колени. Хотя появление новых быстроходных субмарин Тип XXI и Тип XXIII и обеспокоили союзное командование, но тревога оказалась ложной: у немцев уже не было для них ни ресурсов, ни обученных экипажей.
После капитуляции Германии, работы над торпедой продолжились, в расчете использовать ее против Японии. Моряки, кроме того, хотели использовать “Дилер” не только для защиты ОТ субмарин, но и для самообороны своих подводных лодок от противолодочных кораблей неприятеля. Около 100 серийных торпед были изготовлены на королевском торпедном предприятии в 1945 году, однако, многочисленные недоработки и недостаточно отработанная концепция применения так и не позволили им поступить на вооружение до конца войны. Вскоре после окончания войны, “Дилеры” были списаны – сравнительная оценка показала, что в существующем виде торпеда не имеет значимых преимуществ перед состоящей на вооружении американской Mark 24 FIDO.
Тем не менее, программа “Дилер” закрыта не была, и работы над пассивными акустическими торпедами продолжились и после войны. После определенных пертурбаций (связанных в основном с постоянно меняющимися требованиями и взглядами на новое оружие), коммодор Робинсон – к этому времени, уже вышедший в отставку и вступивший в ряды TEE как гражданский специалист – добился перезапуска программы под обозначением “Дилер B” (англ. Dealer B).

Mark 30, ранее DEALER B
Новая торпеда имела более “традиционную” схему управления, использовавшую обычные тандемные винты и подвижные рули глубины и направления. Стремясь улучшить маневренность, рулей на торпеде установили целых восемь (!), в радиальной конфигурации. После долгих испытаний, эта торпеда поступила на вооружение в 1954 году под обозначением Mark 30. Она оказалась чрезвычайно удачной, и состояла на вооружении флота и ВВС вплоть до конца 1970-ых. Планируемая улучшенная версия (Mark 30 Mod 1) должна была внедрить перспективные технологии, но, несмотря на успешные испытания, командование флота решило – в целях экономии средств и унификации с союзниками – остановить разработку новых британских противолодочных торпед, и закупить вместо них американские Mk.43.
Нестандартные двигательные установки
(Строго говоря, эти торпеды не были управляемыми, но я решил упомянуть их по просьбам трудящихся)
Британское торпедное двигателестроение было весьма консервативным. Достигнув высокого технического совершенства в области поршневых двигателей, британцы в межвоенный период практически не интересовались альтернативными решениями – вроде турбин, или электромоторов. Основные исследования были направлены на поиск новых топливно-окислительных смесей.
Экспериментальный 8-цилиндровый торпедный двигатель (1939)
В 1942 году, TTE инициировало работу над твердотопливной газогенераторной торпедой, двигатель которой приводился бы в действие газами от сгорания шашки твердого топлива. Такое решение позволяло радикально упростить конструкцию торпеды, исключив баллон с воздухом и сложные системы подачи, а также уменьшить вес. Идея была очень перспективной, но не привлекла особого внимания Адмиралтейства, и шла сравнительно медленно. Только в январе 1945, был собран торпедный двигатель на топливной шашке из аммиачной селитры и нитрата гуанидина. Продукты горения смешивались с водяным паром и впрыскивались в двигатель. Программа была остановлена вскоре после окончания войны, однако в дальнейшем твердотельное торпедное топливо нашло применение в американских противолодочных торпедах.
Другим проектом, также начатым в 1942 году, была ракетная торпеда. Хотя быстрогорящие ракетные двигатели 1940-ых едва ли были оптимальны для двигающейся в плотной среде торпеды, адмиралов привлекала дешевизна такого оружия, и простота в производстве. Для проверки концепции, взяли корпус стандартной 533-мм торпеды Mark V, извлекли из него двигатель, и заменили четырьмя последовательно поджигающимися топливными шашками, выводящими газы через сопла на корме. На испытаниях, ракетная торпеда показала хорошую устойчивость на курсе и отличную управляемость (за счет исключения вращающего момента пропеллеров), но эффективная дальность составляла менее 800 метров на скорости всего в 24 узла. Само по себе это не обескуражило конструкторов (в конце концов, никто и не ожидал лучших результатов от собранного из запчастей прототипа!) но флот решил, что тактической необходимости в оружии малого радиуса действия просто нет. Интересно, что после войны, идея ракетной торпеды была воплощена в советской РАТ-52.
Еще одним нестандартным проектом была авиационная торпеда, приводимая в движение раскрученным маховиком – своего рода, возврат к гироскопической торпеде Хоуэлла (1890-ые) на новом техническом уровне. Преимуществами такой торпеды были дешевизна, надежность и очень высокая устойчивость на курсе за счет прецессии маховиков. Проведенные в 1942 году расчеты показывали, что торпеда, движимая двумя 60-килограммовыми маховиками, раскрученными до 25000 оборотов в минуту, сможет пройти около 2000 метров на 27 узлах – примерно вдвое меньше, чем стандартная авиаторпеда Mark XII. Однако, это выглядело приемлемым компромиссом, поскольку маховиковая торпеда должна была стоить всего 950 фунтов – против 1600 фунтов у Mark XII, и при этом отличалась бы гораздо лучшей точностью.
Однако, две проблемы погубили проект:
- Хотя стоимость торпеды и была низкой, трудоемкость производства оказалась очень высокой – более 7000 человеко-часов, в основном из-за высокой требовательности к качеству механики.
- Торпеда требовала раскрутки маховиков перед установкой на самолет, и затем поддержания вращения маховиков в полете – что вынуждало оснащать самолеты дополнительной (и весьма массивной) аппаратурой.
Наконец, еще одной идеей (имеющей прямое отношение к управляемому оружию) была попытка радикально снизить шумность торпеды, за счет отказа от винтового движителя. Британцы считали основным источником шума кавитацию на лопастях винта. В попытке решить проблему кавитации, инженеры разработали оригинальный движитель “зонтик”, или “спрут”. Торпеда приводилась в движение возвратно-поступательными движениями лопаток, размещенных по кругу в ее кормовой части. На возвратном движении, лопатки складывались и оказывали минимальное сопротивление. На поступательном, лопатки раскрывались и с силой отталкивались от воды. Хотя сама концепция была вполне работоспособна, практическая реализация ее в габаритах торпеды оказалась затруднительна, и проект закрыли.
Источники
- A history of the torpedo (parts 3-4) — G. J. Kirby, Journal of the ROYAL NAVAL SCIENTIFIC SERVICE, Vol. 27 (1972), pp 78-106.
- Acoustic torpedoes — SUMMARY TECHNICAL REPORT OF THE NATIONAL DEFENSE RESEARCH COMMITTEE, Vol. 22 (1946).
- The Silent Deep: The Royal Navy Submarine Service Since 1945 — James Jinks, Peter Hennessy, Penguin UK (2015)
источник: https://fonzeppelin.livejournal.com/68885.html
")


