
Электронные стражи Альбиона: самонаводящаяся ракета «Артемида»

Электронные стражи Альбиона: самонаводящаяся ракета «Артемида»
Содержание:
Эта ракета является моей особой любимицей, потому что А — она самонаводящаяся (испытываю слабость к оружию, обладающему «своим умом», да), B — она простая (в отличие от подавляющего большинства управляшек ВМВ), и С — она, пожалуй, единственная УРВВ периода Второй Мировой Войны, которая могла бы быть реально эффективной в боевой обстановке.
История создания
К 1943 году, британские ВВС уже имели достаточно четкое представление о управляемых ракетах “воздух-воздух”. Наиболее перспективным на тот момент виделось радиокомандное наведение ракеты оператором, с отслеживанием ракеты и цели при помощи радара. Однако, лейтенант Королевских ВВС Бенсон (уже известный нам по зенитной ракете “Бен”) имел свое мнение по вопросу. Тщательно обдумав вопрос наведения ракет “воздух-воздух”, Бенсон пришел к выводу, что ручное командное управление для них никогда не будет полностью эффективным. Причем проблема была не в ограничениях технологии, а в неустранимом противоречии:
С точки зрения ракеты, чем быстрее она достигает цели, тем лучше. Меньше шансов, что цель попробует уклониться, либо сама ракета отклонится от курса. А стало быть, ракете нужно лететь быстрее.
Однако, с точки зрения оператора, быстро летящей ракетой трудно управлять. Если продолжительность полета ракеты составляет всего несколько секунд, оператор просто не успеет внести сколь-нибудь значимое число коррекций. Поэтому ракете нужно лететь медленнее.

Середина 1946: перехватчик «Виккерс» Тип 432 атакует немецкий четырехмоторный бомбардировщик Me 264 самонаводящейся ракетой «Артемида»
Исходя из этих логических выкладок, Бенсон посчитал продолжение работ над программой “Спаниэль” бессмысленным. Управляемая ракета, запускаемая с самолета против другого самолета, должна была иметь полностью автоматическое управление, не сдерживаемое черепашьей скоростью человеческой реакции. Командование RAF в общем и целом согласилось с этими выводами, что стало одной из причин прекращения работы над “Спаниэлем” в 1943 году. Однако, это означало, что теперь RAF нужна новая ракета.
Разработка
Одним из препятствий на пути британских УРВВ стало отсутствие двигателя, более эффективного, чем массово производившаяся 3-дюймовая твердотопливная ракета. Этот снаряд отличался надежностью, простотой в производстве и неприхотливостью, но его “ходовые” возможности были слишком ограничены. С 1941 по 1943 год британские инженеры раз за разом пытались скомбинировать в крайне ограниченном запасе полезной нагрузки 3-дюмовой ракеты систему управления, гироскопический автопилот для стабилизации по крену, и хоть какую-то боевую часть с неконтактным (желательно!) взрывателем. И раз за разом приходили к обескураживающему выводу, что это не получается.
Неуправляемая ракета RP-3
Самой тяжелой частью ракеты был автопилот, удерживающий ее от вращения по крену. Для ракет с командным управлением, стабилизация по крену была неизбежным злом. Чтобы адекватно воспринимать команды оператора (или даже автоматической системы управления), ракета и оператор должны были соглашаться в том, где находятся “право”, “лево”, “верх” и “низ”. В противном случае, контроль над ракетой быстро оказался бы утрачен.
Лейтенант Бенсон же задался вопросом: а зачем, собственно, маленькой и легкой ракете стабилизация по крену? Пусть вертится, как ее механической душе угодно! Если система наведения ракеты будет работать в своей собственной системе координат, получая информацию только о направлении на цель относительно самой ракеты, то неважно, какой стороной вверх она развернулась в полете. Ракета при этом получится маленькой и компактной, а небольшое время полета (обусловленное возможностями двигателя) позволяло обойтись максимально простой системой управления.
Идеей Бенсона было создать ракету с полуактивным радиолокационным наведением. Радар самолета-носителя “подсвечивал” своим лучом цель, и головка самонаведения ракеты воспринимала отраженный от цели сигнал. При этом решались сразу обе проблемы. Во-первых, ракета наводилась на цель автоматически, и не сдерживалась более скоростью человеческой реакции. Во-вторых, ракета работала в собственной системе координат, и не нуждалась в четком определении направлений. Единственным направлением, которое имело для нее значение, было “на цель”.
Проект (по инициативе Бенсона) получил имя “Артемида”, в честь греческой богини охоты. Название вполне подходило снаряду, чьей задачей было преследовать неприятельские бомбардировщики!
Описание
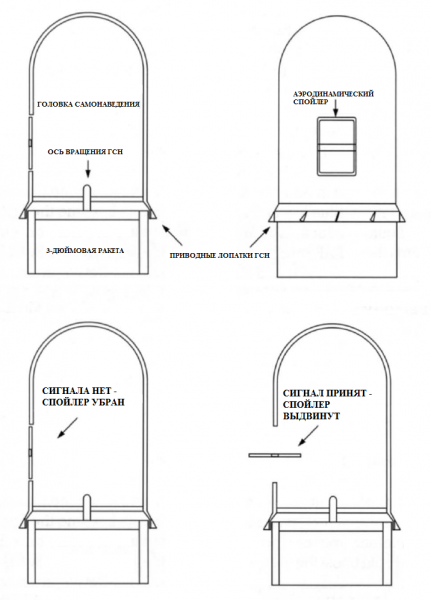
Схема ГСН «Артемиды» — версия с аэродинамическим спойлером
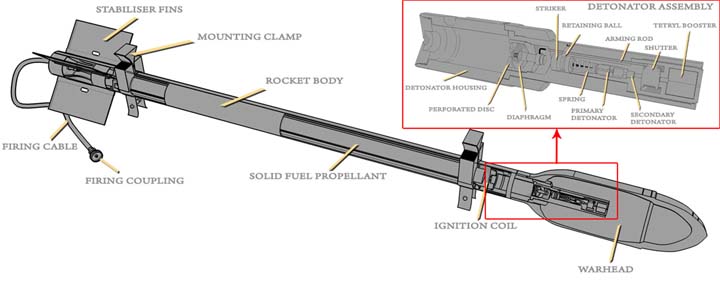
По конструкции, “Артемида” была, пожалуй, самым простым и изящным управляемым оружием, спроектированным в годы Второй Мировой Войны. Она представляла собой обыкновенную 3-дюймовую авиационную ракету RP-3 (англ. Rocket Projectile, 3 inch – ракетный снаряд, трехдюймовый), на головную часть которой был установлен простейший блок управления. К телу ракеты блок управления крепился на подшипнике, и вращался независимо. Постоянное вращение блока управления было необходимо для работы системы самонаведения. Механизм вращения также был простым и элегантным – на блоке управления были закреплены наклонные лопасти, и весь блок раскручивался набегающим потоком воздуха.
“Артемида” наводилась на отраженный от цели луч РЛС самолета-носителя. Внутри блока управления находилась узконаправленная приемная антенна. Она была наклонена под углом примерно в 45 градусов от продольной оси ракеты. Коническое сканирование обеспечивалось вращением самого блока управления, раскручиваемого набегающим потоком воздуха. Когда антенна оказывалась направлена на цель, принимаемый сигнал достигал максимума, и срабатывало – единственное! – исполнительное реле, посылая команду органам управления.
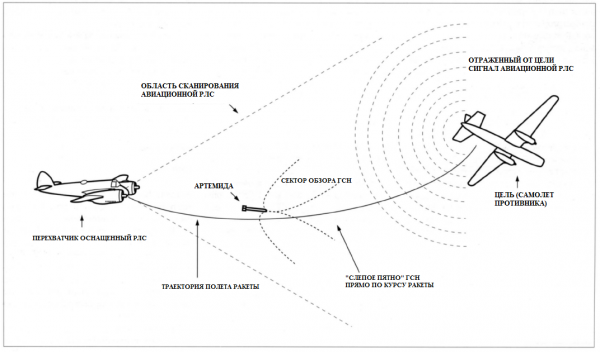
Схема применения «Артемиды»
Прямо по курсу ракеты находилось “слепое пятно” антенны. Когда цель оказывалась прямо по курсу, сигнал от нее исчезал, и система управления переставала срабатывать. Ракета продолжала двигаться прямо до тех пор, пока цель вновь не появлялась в поле зрения, либо до тех пор, пока не достигала цели. Вблизи от цели, срабатывал неконтактный взрыватель (радиолокационный или фотоэлектрический) и происходил подрыв боевой части.
Система управления ракетой была столь же проста и изящна. Было разработано две альтернативные версии – аэродинамическое и газодинамическое управление:
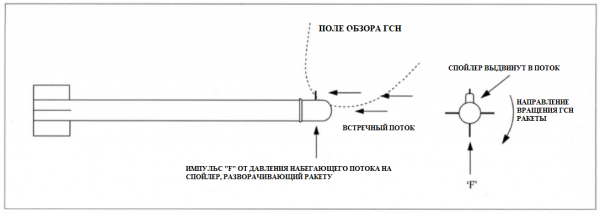
* Аэродинамическая система состояла из единственного органа управления – выдвижного спойлера, установленного прямо на вращающемся блоке наведения. Спойлер находился на одной стороне с приемной антенной, и выполнял одну-единственную задачу: поворачивал ракету в ту сторону, с которой поступал сигнал. Так как спойлер вращался вместе с блоком наведения, он всегда был ориентирован точно в нужном направлении.
Когда антенна ракеты смотрела в сторону цели, исполнительное реле подавало питание на соленоид, и спойлер поворачивался, выдвигаясь в воздушный поток. Курс ракеты рывком отклонялся в сторону цели. Когда же антенна проворачивалась далее, и сигнал ослабевал, то реле размыкалось, соленоид разряжался, и напор воздуха возвращал спойлер в нейтральное положение. Таким образом, каждый раз, когда головка самонаведения ракеты видела цель, ракета получала импульс, поворачивающий ее в сторону цели.
Подобная система управления выглядела чрезвычайно простой и элегантной, однако, идея “дергать ракету за голову” вызывала определенные сомнения. Точкой приложения сил оказывался в результате блок управления (самая хрупка часть ракеты), и это не слишком-то нравилось инженерам. В качестве альтернативы, Бенсон предложил газодинамическую систему управления.
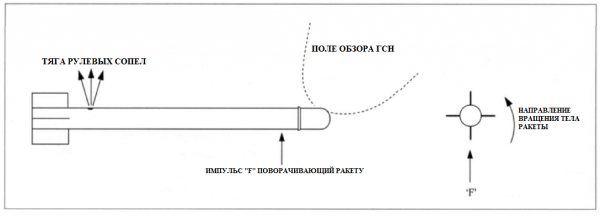
* Газодинамическая система состояла из рулевых сопел, расположенных по кругу в кормовой части ракеты (перед оперением) и направленных перпендикулярно ее продольной оси. Эти сопла отводили часть выхлопа работающего двигателя ракеты, создавая вращающий момент. Открывались и закрывались рулевые сопла электричеством.
Когда антенна на вращающемся блоке наведения принимала сигнал от цели, реле активировало направленное в соответствующем направлении сопло. Выбор нужного сопла осуществлялся банально: на вращающемся блоке управления размещалась токонесущая щетка, а на корпусе ракеты – кольцо из контактов. Срабатывало то сопло, контакта которого в момент поступления сигнала касалась щетка блока управления. Точкой приложения сил при этом оказывался корпус самой ракеты. Недостатком же было то, что газодинамическое управление могло работать, только пока горел двигатель. Впрочем, учитывая что эффективная дальность “Артемиды” так и так не превышала 2000 метров, едва ли этот недостаток был актуален.
Разумеется, у проекта “Артемида” были и очевидные недостатки. В основном они вытекали из его же главного преимущества, простоты конструкции. Система управления ракеты работала по принципу “все или ничего” (также известному как “bang-bang”), причем на редкость грубо, резкими рывками. Фактически, когда ГСН ракеты принимала сигнал от цели, ракета тут же получала “пинок” в том направлении, в котором увидела цель. “Пинки” повторялись с каждым оборотом, пока сигнал вообще не переставал приходить. Ракета была неспособна к пропорциональному управлению или вообще к сколь-нибудь тонким маневрам, и легко могла потерять цель, просто развернувшись слишком резко.
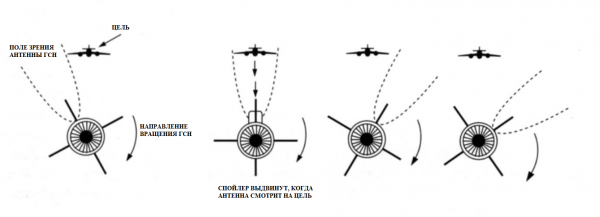
Схема наведения «Артемиды»
Еще одним крупным недостатком было то, что ракета не могла отличить “цель в слепой зоне прямо по курсу” от “цель пропала вообще”. Если цель резким рывком уходила из поля зрения, то ракета просто летела прямо, не делая никаких попыток снова отыскать цель.
Решить эти проблемы без радикального усложнения системы управления (что делать было нельзя, ибо главным преимуществом “Артемиды” была именно простота конструкции!) оказалось невозможно. Поэтому основным способом эффективного применения “Артемиды”, видимо, была бы залповая стрельба сразу несколькими снарядами по одной цели. Хотя бы один снаряд из залпа да сманеврировал бы, куда надо.
Основным носителем “Артемиды” должен был быть тяжелый истребитель “Бристоль Бофайтер”, оснащенный авиационной РЛС AI Mk IX/Mk X. Его полезная нагрузка позволяла нести до восьми 3-дюймовых ракет. Однако, ключевым достоинством “Артемиды” было то, что она могла устанавливаться на любой самолет, оснащенный подходящим радаром. К 1944 году, развитие электроники позволило создавать компактные радарные подвески (вроде американской AN/APS-4 и последующей AN/SPS-6), которые использовали даже одномоторные и одноместные (!) истребители.
Все это означало, что “Артемида” могла бы стать первой в мире УРВВ, пригодной не только для специализированных перехватчиков, но и для истребителей “общего назначения”, опередив на десятилетие знаменитый AIM-9 “Sidewinder”. Возможности 3-дюймовой ракеты были вполне достаточны, чтобы сделать “Артемиду” реальной угрозой для любых существующих бомбардировщиков. Однако… хотя по проекту “Артемида” были выполнены значительные проработки, RAF так и не решилась воплотить ее в металле.

Радар AN/APS-6 под одноместным истребителем ВМФ США
Главной причиной было отсутствие необходимости. К 1944 году, некогда грозные Люфтваффе деградировали до незначительной силы, едва-едва способной обороняться, не говоря уже о наступлении. Предпринятый немцами в январе-мае 1944 “карманный блиц” (операция “Стейнбок”) завершился абсолютной катастрофой, в ходе которой немцы потеряли 329 бомбардировщиков, а британцы – всего 29 истребителей. Причем абсолютное большинство британских потерь над островами пришлись не на воздушные бои, а на аварии при посадке!
В такой ситуации, немедленной необходимости в принципиально новом оружии не было. Тем более столь “импровизационное”, как “Артемида”. Хотя командованию RAF нравился концепт Бенсона, они, тем не менее, рационально указывали, что его ракета будет эффективна лишь весьма ограниченное время. Ее примитивная ГСН была чрезвычайно восприимчива к помехам, а дальность по меркам 1944 года уже считалась недостаточной, чтобы вооруженный “Артемидой” перехватчик мог оставаться вне досягаемости оборонительного вооружения бомбардировщика. Прогресс в области авиации и средств радиоэлектронной борьбы неминуемо сделал бы “Артемиду” устаревшей буквально за пару лет.
Второе дыхание “Артемида” обрела летом 1944 с началом “роботблица” – бомбардировки Великобритании крылатыми ракетами Fi-103 (более известными как Фау-1). Первые же удары продемонстрировали, что британские перехватчики к противодействию ракетам не готовы. Небольшие размеры, высокая скорость и малая высота полета Фау-1 чрезвычайно затрудняли попадание в нее из авиационных пушек и пулеметов. Кроме того, подбитая Фау-1 имела неприятную привычку взрываться – и 800 килограмм взрывчатки в ее боевой части вполне могли уничтожить неосторожный перехватчик. Пытаясь решить проблему, пилоты прибегали к отчаянным мерам – например, подцепляли крыло летящей ракеты крылом своего самолета, и резким рывком переворачивали Фау-1. Такая “воздушная акробатика” совершенно не доставляла удовольствия ни пилотам, ни командованию.
Истребитель-перехватчик (справа) подцепляет крылом — крыло Фау-1 (слева)
В конечном итоге, проблему Фау-1 удалось решить с американской помощью. Американцы передали Британии свои новейшие неконтактные радиовзрыватели для зенитных снарядов. Эффективность зенитного огня сразу возросла до такой степени, что полностью компенсировала сравнительную неэффективность перехватчиков. Тем не менее, британцы не были в полной мере удовлетворены таким решением. Командование ПВО очень опасалось, что немцы могут оснастить Фау-1 сравнительно простым механическим приспособлением, заставляющим ракету выписывать зигзаг на заключительном отрезке траектории. Даже такое примитивное маневрирование значительно снизило бы эффективность зенитных пушек – а попытки подцепить Фау-1 крылом стали бы смертельно опасными.
“Артемида” вполне могла бы стать решением этой проблемы, позволяя сбивать Фау-1 с безопасной дистанции. Ее самонаведение гарантировало бы успешный перехват снаряда, даже двигающегося зигзагом. Недостаточная дальность “Артемиды” в данном конкретном случае значения не имела, так как Фау-1 не отстреливалась. Однако, пока в RAF шло оживленное обсуждение, вопрос с “летающими бомбами” решился сам собой. Союзные войска во Франции вырвались с плацдармов, и вскоре захватили немецкие пусковые позиции. Вопрос “Артемиды” снова потерял актуальность, и вскоре проект был закрыт – на этот раз, окончательно. Зимой 1945 года, немцы, используя более дальнобойные ракеты модели Fi-103F попытались организовать новый “роботблиц” со стартовых позиций в Голландии – но оснастить ракеты приспособлением для зигзагирования они так и не догадались.
Источники
British Secret Projects 4: Hypersonics, Ramjets and Missiles — C. Gibbons, T. Battler, Midland Publishing (1997)
источник: https://fonzeppelin.livejournal.com/65356.html
")


