
Электронные стражи Альбиона: летающие торпеды
Электронные стражи Альбиона: летающие торпеды
Содержание:
Предшествующие статьи из цикла “Электронные стражи Альбиона” выделяют интересный момент – основные британские усилия в области управляемых вооружений были ориентированы на оборону. Это было связано с расстановкой приоритетов в условиях ограниченных ресурсов (имевших место в начале ВМВ). Абсолютно приоритетной задачей для Великобритании было не допустить захвата немцами превосходства в воздухе: так как эта задача была и наиболее технически сложной, то основные усилия были обращены именно на нее. И, тем не менее, британцы не забывали и про средства нападения. Хотя оборона и находилась в явном приоритете, все же в тени впечатляющих программ ЗУР и УРВВ находилось место и для управляемых бомб и ракет, в первую очередь противокорабельных.
Чрезвычайно перспективной в межвоенный период казалась идея летающей торпеды – оружия, способного преодолеть расстояние до цели по воздуху, а затем, погрузившись в воду, действовать как торпеда (или попросту нести на себе отделяемую торпеду). Такое оружие сочетало в себе:
- Дальность действия и быстроту доставки воздушного вооружения – действующего в менее плотной и энергозатратной воздушной среде.
- Сравнительную простоту наведения – вместо сложной атаки в трех измерениях, как для планирующих бомб, летающей торпеде нужно было, фактически, управляться только в двумерной плоскости.
- Эффективное поражение цели в подводную часть – в то время как обычные управляемые бомбы и ракеты поражали цель в палубы и надстройки, торпеды поражали подводную часть цели, нанося более значительные повреждения.
- Наконец, идущую к цели под водой торпеду было сложнее перехватить и уничтожить, чем летящую на корабль управляемую бомбу или ракету.
С летающими торпедами экспериментировали многие, но британцы, пожалуй, продвинулись в этом вопросе дальше всех — в конечном итоге, можно сказать, выйдя за рамки здравого смысла.
Toraplane
Сэр Чарльз Деннистоун “Деннис” Барни был весьма известным инженером и изобретателем, внесшим значительный вклад в исследование аэродинамики летательных аппаратов. Он, вместе с Барнесом Уоллесом и Невиллом Шютом принимал участие в создании пассажирских дирижаблей R-100 и R-101 в рамках амбициозного (увы, безуспешного) “Имперского плана дирижаблестроения” 1920-ых. С приближением войны, сэр Барни вернулся на военную службу как инженер-конструктор.
В список его идей, разработанных совместно с Невилом Шютом и предложенных в начале 1939 года британскому флоту, входили:
- Тораплан (англ. Toraplane) – сокращение от “ТОРпедный ПЛАНер”. Представлял собой авиационную торпеду, оснащенную крыльями, органами управления и автопилотом. Торпеда должна была запускаться по кораблям противника из-за предела досягаемости неприятельской зенитной артиллерии.
- Дораван (англ. Doravane) – планирующая бомба, предназначенная для атаки целей из бреющего полета. Для контроля высоты полета, использовала буксируемый под бомбой на длинном тросике параван, касание которым грунта (или препятствия) служило бы сигналом “вверх” для автопилота.
- Пикирующий Дораван (англ. Diving Doravane) – оригинальной конструкции управляемая бомба, предназначенная для пикирующего бомбометания из горизонтального (!) полета. После отделения от носителя, бомба начинала выписывать дуговую траекторию, управляемая оригинальной конструкции “центробежным регулятором”, до тех пор, пока не переходила в вертикальное падение.
- Октаплан (англ. Octaplane) – планирующая мина для воздушной постановки. Была устроена аналогично “Тораплану”, отличаясь только заменой торпеды на донную мину. Предназначалась для воздушного минирования контролируемых неприятелем гаваней, судоходных рек и портов, сильно защищенных зенитной артиллерией.
Из этих проектов, только первые два (“Тораплан” и “Дораван”) привлекли достаточное внимание правительства (в первую очередь, разумеется, Черчилля). Инженеры флота, впрочем, сочли “Дораван” неработоспособным – высотомер в виде паравана на тросике явно не смог бы удерживать бомбу в бреющем полете над сушей – но “Тораплан” выглядел вполне эффективным решением. Основу британской палубной торпедоносной авиации все еще составляли бипланы, не отличающиеся особой скоростью, и опасно уязвимые для зенитного огня. Использование “Тораплана” позволяло бы им атаковать корабли, оставаясь вне пределов досягаемости неприятельских зениток. Хотя Министерство Авиации отнеслось к проекту с определенным сомнением, оно, тем не менее, согласилось выделить средства на эксперименты.
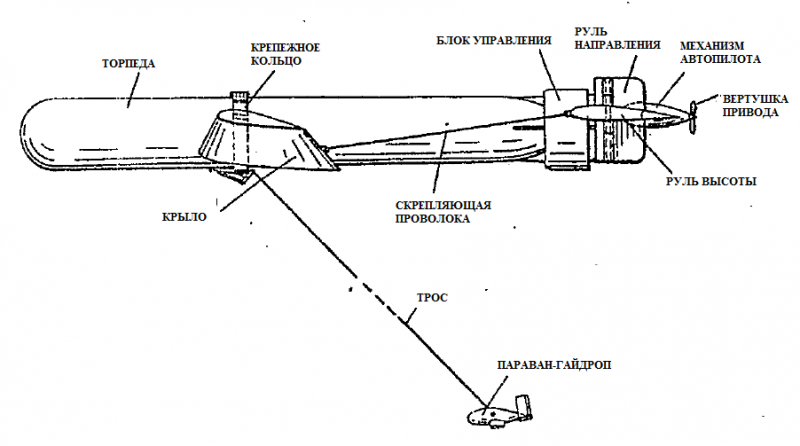
“Тораплан” представлял собой достаточно простое решение. Это был, по сути дела, комплект крыльев и хвостового оперения с гироскопическим автопилотом, “надевавшийся” на корпус торпеды. Крылья имели двугранный угол, придающий “Тораплану” устойчивость по крену, и были оснащены элеронами. “Фюзеляж” “Тораплана” как таковой отсутствовал: крылья соединялись с хвостовым оперением при помощи натянутой проволоки (!). На хвостовом оперении устанавливался и блок управления с рулями высоты и направления. При этом, исходный проект “Тораплана” не предусматривал отдельного автопилота вообще (!). Удержание летящего планера на курсе должно было выполняться за счет гироскопа самой торпеды, рулевые плоскости которой соединялись с рулевыми плоскостями планера. Контроля высоты вообще не было; вертикальный руль устанавливался в фиксированное положение перед стартом.

Однако, такое примитивное решение вызывало сильные сомнения, и сэр Барни предложил альтернативное – более традиционное! – с использованием отдельного гироскопа, управляющего при помощи сервомеханизмов вертикальным и горизонтальным рулем. Сервомеханизмы приводились в действие гидравликой, от вертушки на корме, вращающей центробежный масляный насос.
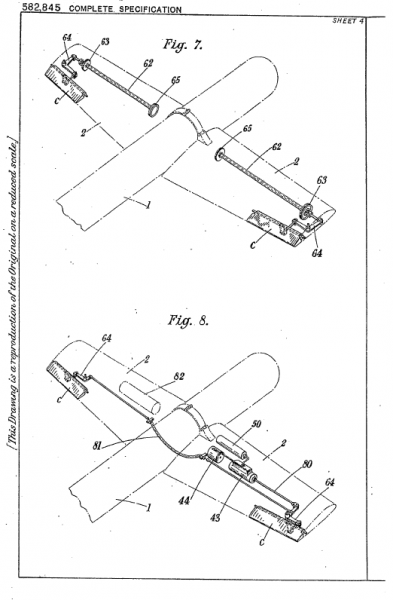
СИСТЕМА СТАБИЛИЗАЦИИ ТОРАПЛАНА ПО КРЕНУ. Вверху: версия с ртутным осциллятором, управляющим элеронами. Внизу: версия с гироскопом и отдельной гидравлической системой, управляющей элеронами.
Оригинально выглядела система стабилизации по крену. Чтобы не занимать место под второй гироскоп, изобретатель предложил использовать т.н. “ртутный осциллятор”. Он состоял из частично заполненных ртутью трубок, проложенных по длине крыла. Когда летящая торпеда кренилась на борт, ртуть в опускающемся вниз крыле под действием силы тяжести перетекала к законцовке, и давила на поршень. Поршень приводил в действие соответствующий элерон, выравнивая “Тораплан”. Когда же торпеда выравнивалась, ртуть перетекала к основанию крыла, отпуская поршень и возвращая элерон в исходное положение. Система была весьма нестандартна, но вполне подходила для ситуаций, когда требовалось лишь поддерживать прямолинейный полет.
Впрочем, не будучи уверенным в надежности “ртутного осциллятора”, сэр Барни в качестве альтернативы предложил более традиционную версию, со стабилизацией по крену при помощи отдельного гироскопа. При этом возникла проблема: крылья и хвостовая часть соединялись только проволокой, то есть для работы сервоприводов элеронов пришлось устанавливать в крыле отдельную гидросистему. В попытке решить проблему, сэр Барни предложил «чисто электрический» «Тораплан», на котором гидравлика заменялась соленоидами, питаемыми током от вертушки генератора.
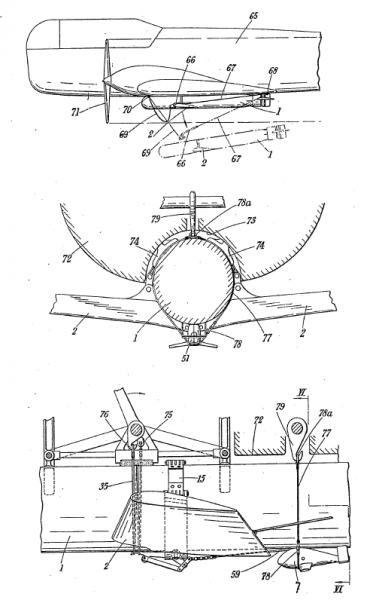
Закрепление «Тораплана» под самолетом-носителем
“Тораплан” устанавливался под корпусом самолета-носителя, позади шасси. Специальный механический вычислитель, соединенный со стабилизированным прицелом, выполнял расчет поправок на снос ветром и движение цели. От пилота же требовалось держать самолет на курсе ровно во всех трех плоскостях. Для запуска “Тораплана” использовалась откидная трапеция, которая, опускаясь, выводила летающую торпеду из области турбулентности вокруг самолета-носителя. Направление задавалось исключительно курсом самолета-носителя перед пуском торпеды, продолжительность планирования устанавливалась перед стартом.
Отделение крыльев и оперения перед входом торпеды в воду выполнялось при помощи гайдропа-паравана, тянувшегося на тросике под “Торапланом”. Длина троса определяла высоту сброса торпеды. Когда параван входил в воду (что означало, что торпеда снизилась до высоты сброса), создаваемое им сопротивление натягивало тросик и выдергивало фиксатор из крепления крыла. Под весом торпеды, крепление раскрывалось, и торпеда, выскользнув из крыла и оперения, падала в воду. Запускался двигатель торпеды, и она устремлялась к цели. Так, во всяком случае, все выглядело в теории.
Гайдроп-параван для «Тораплана»
Исходная модель “Тораплана” (названная “Тора I”) поступила на испытания в 1940 году. Она имела композитную конструкцию, собранную из дерева и металла. Крыло имело положительный двугранный угол около 3-4 градусов, и размах 3,4 метра. В качестве полезной нагрузки, “Тора I” снаряжалась 45-сантиметровой авиационной торпедой Mark XIV, имевшей дальность хода порядка 2700 метров на 41 узле и снаряжавшейся боевой частью весом 170 кг.
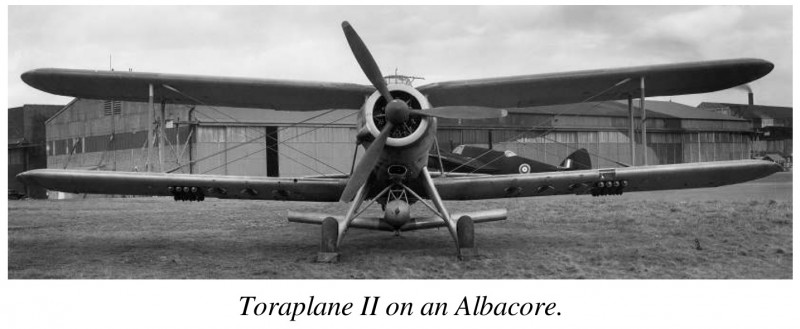
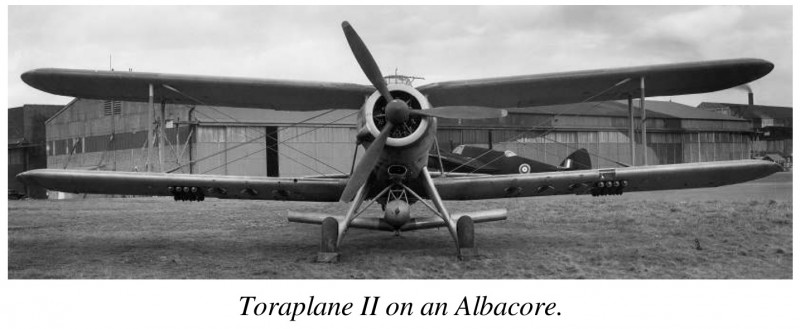
“Тора I” предназначалась для сбрасывания с палубных торпедоносцев “Суордфиш”, “Альбакор”, а также двухмоторных береговых бомбардировщиков “Бьюфорт” и “Бота”. Первые испытания состоялись довольно скоро, но результаты были совершенно неудовлетворительны. “Тора I” обладала явно недостаточной устойчивостью по крену, что было связано с ошибками при проектировании. Кроме того, торпеда Mark XIV была доступна лишь в ограниченных количествах (в итоге почти весь запас этих торпед был потерян в начале 1942 при падении Сингапура).
В попытке решить проблему, спешно разработали “Тора II”. Это был уже цельнометаллический аппарат, размахом крыла около 4 метров. Положительный двугранный угол крыла увеличили до 6 градусов, что устранило проблемы с поперечной стабильностью. В качестве боевой части, “Тора II” оснастили старомодной – но доступной в больших количествах – торпедой Mark XII, имевшей скорость хода до 40 узлов.
“Тора II” предназначалась в первую очередь для палубных торпедоносцев (хотя рассматривалось и вооружение ею “Бьюфортов”), “Альбакора” и “Барракуды”. Высота ее сброса составляла 300-500 метров, на скоростях порядка 217-275 км/ч. Сброшенная с высоты 300 метров, торпеда могла пропланировать до 5 км, после чего приводнялась и проходила еще около 2 км под водой.
Испытания “Тора II” начались в августе 1941 года. Сбросы проводились с “Бьюфортов” 217-го эскадрона в Абботинче. На испытаниях “Тора II” присутствовал американский наблюдатель, собиравшийся одолжить наиболее удачные модели для изучения в Соединенных Штатах. Однако, возвращаться на родину ему пришлось с пустыми руками. Ни одна испытываемая модель не могла быть названа в полной мере удачной.
Попросту оказалось, что точность “Тораплана” недостаточна для мало-мальски надежного практического применения. Вынужденно примитивная инерциальная система наведения попросту не могла удерживать планер на курсе с необходимой точностью. Любые внешние воздействия – тряска при отцепке, внезапный порыв ветра в полете – приводили к тому, что “Тораплан” сбивался с курса. Хотя иногда торпедный планер демонстрировал отличные результаты, повторить их с приемлемой для практического использования частотой не получалось. Кроме того, торпедный планер летел медленно, и быстроходный военный корабль, заметив угрозу, вполне мог успеть изменить курс. Пытаясь хоть как-то решить проблему, Адмиралтейство попробовало массированные пуски “Торапланов”, надеясь компенсировать кучностью недостаточную точность. Но и эта попытка не увенчалась успехом – идеальной синхронизации сброса добиться не удалось.

Оснащенный радаром палубный торпедоносец «Суордфиш»
Финальную точку в истории “Тораплана” поставил технический прогресс. В 1942 году, британская палубная авиация разработала новую доктрину – “слепые” торпедные атаки по радару. Авиационный радар Mark X ASV устанавливался на ведущий торпедоносец вместо боевой нагрузки, позволяя ему находить цели в любых условиях видимости и направлять атаку вооруженных ведомых. Тактика “слепых” атак позволяла торпедоносцам успешно поражать цели в ночной темноте, в тумане или под прикрытием дымовой завесы. Практически на всех военных кораблях Оси, вплоть до самого конца войны управление зенитным огнем было чисто оптическим, радары использовались только для обнаружения приближающихся самолетов – и “слепые” атаки британских торпедоносцев в условиях плохой видимости эффективно решали проблему их уязвимости.
В октябре 1942, работы над более ненужным “Торапланом” были прекращены.
Zonal
В самом конце Второй Мировой Войны, британское адмиралтейство инициировало программу разработки принципиально новых видов торпедного оружия – так называемую, “Z-программу”. Появление в 1943-1945 первых акустических самонаводящихся торпед и высокоэффективных компактных двигателей вдохнуло новую идею в старую идею летающей торпеды. Проблему низкой точности планера теперь можно было решить, вооружив его торпедой, способной самостоятельно искать цель. Однако, просто торпедоносный планер (вроде американского AUM-N-2 «Petrel») британских инженеров почему-то не устроил. Идея иметь отдельную двигательную установку для движения в воздухе и в воде показалась им избыточной.
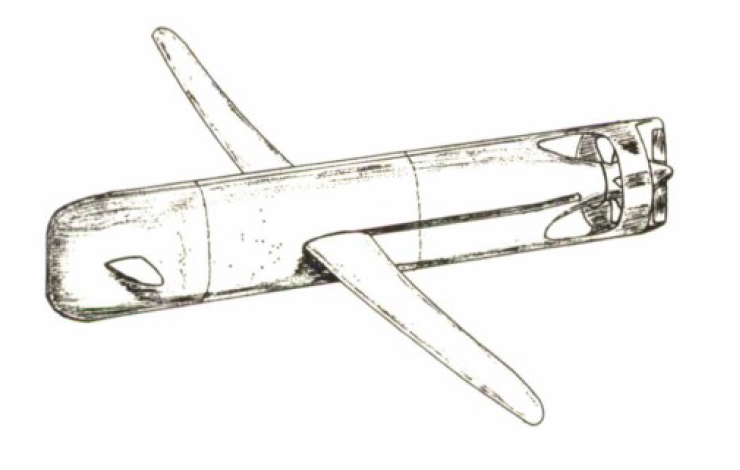
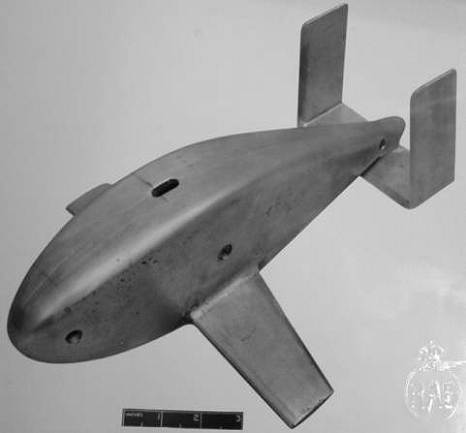
Летающая торпеда “Зонал” (англ. Zonal), предназначавшаяся для запуска с военных кораблей, имела весьма нестандартную форму – эллиптическое сечение, вытянутое в вертикальной плоскости, и долотообразный нос. Такая странная конфигурация была выбрана, во-первых чтобы увеличить прочность торпеды при скоростном входе в воду, а во-вторых – чтобы вместить требуемую двигательную установку. В кормовой части “Зонала” находился большого диаметра винт, заключенный в кольцо импеллера, и руль направления. В носовой части торпеды размещались рули высоты/глубины, служившие также и средством стабилизации по крену.
Торпеда была оснащена узкими крыльями в центральной части корпуса (крылья не составляли единой конструкции), которые при хранении складывались в специальные ниши. После запуска торпеды, пружинный механизм раскладывал крылья. Оказавшись в воде, торпеда вновь складывала крылья.
В движение торпеда должна была приводиться трехцилиндровым двигателем двойного действия, расчетной мощностью до 900 л.с. Этот впечатляющий двигатель должен был работать на метаноле и кислороде. При помощи полого коленчатого вала и коробки передач (!), усилие двигателя передавалось на пропеллер, оптимизированный для работы как в воде, так и в воздухе. Коробка передач автоматически переключалась с “воздушного” режима на “водный”.
Управление торпедой в полете осуществлялось с помощью гироскопического автопилота, удерживающего ее на заданном курсе, и радарного альтиметра. Последний должен был удерживать “Зонал” на небольшой высоте над водой, тем самым снижая его уязвимость для противовоздушной обороны неприятеля. Низкая точность тогдашних альтиметров не играла особой роли, так как атака цели предусматривалась только после приводнения. Оказавшись в воде, торпеда использовала активную акустическую головку самонаведения для поиска цели. Так как “Зонал” предназначался для поражения надводных кораблей, головка самонаведения выполняла сканирование только в горизонтальной плоскости, а глубина хода устанавливалась перед запуском.
Вес боевой части был вынужденно сведен к минимуму в 520 фунтов (235 кг). Британцы рассчитывали частично компенсировать этот недостаток, оснастив торпеду неконтактным взрывателем, магнитным или фотоэлектрическим.
Летающая торпеда должна была запускаться из 30-дюймового корабельного торпедного аппарата (британский флот на всякий случай исходил из того, что габариты торпед будут только расти). “Зонал” заряжался в трубу и хранился в ней как обычная торпеда. Выброшенный подрывом порохового заряда, “Зонал” вылетал из трубы, и пружинный механизм автоматически раскрывал крылья, после чего запускался мотор торпеды.
Запущенный “Зонал” должен был лететь к цели на малой высоте, поддерживая курс при помощи гироскопического автопилота и высоту при помощи радарного альтиметра. Скорость летающей торпеды (предположительно) должна была достигать впечатляющих 500 узлов, или 926 км/ч!
Пролетев предустановленную дистанцию – до 50 километров – “Зонал” приводнялся, его крылья складывались, и автоматическая коробка передач переключалась на водный режим. Погрузившись в воду, “Зонал” шел на скорости порядка 55 узлов (около 100 км/ч), используя для работы мотора сжатый кислород из бортового резервуара. Дальность подводного хода торпеды оценивалась в 5000 метров. Активная акустическая головка самонаведения “Зонала” осуществляла сканирование в поисках потенциальной цели. Обнаружив цель, торпеда самостоятельно наводилась на нее.

Летающая торпеда «Зонал» (макет)
Предполагалось также создать две модификации этой торпеды:
- Zoster (“Зостер”) – должен был стать версией “Зонала”, приспособленной для запуска с самолетов. Воздушный пуск позволял увеличить дальность действия летающей торпеды и решить проблему уязвимости самолетов-торпедоносцев для существующих и перспективных систем ПВО.
- Zombi (“Зомба”) – источники несколько расходятся. Одни считают его версией “Зонала” для подводного запуска из торпедных аппаратов подводных лодок. Другие определяют “Зомбу” как совершенно отдельный проект 30-дюймовой противолодочной торпеды, способной находить и поражать неприятельские субмарины на глубине до 300 метров.
Все это выглядело очень прогрессивно и даже футуристично, однако, с реализацией проекта возникли проблемы. Просчитав теоретические возможности головки самонаведения, инженеры пришли к обескураживающему выводу: дальность захвата цели для ГСН “Зонала” будет не более 25-30 метров. Причиной тому была и неисправимо высокая шумность двигателя торпеды, и недостаток места, и ограниченные возможности существующей акустической технологии. По сути дела, чтобы торпеда могла поразить цель, та должна была оставаться в очень узкой полосе шириной около 50 метров и длиной около 5000 метров. Естественно, что с такими мизерными возможностями “Зонал” оказывался почти бесполезным.
Хуже того: ни один из ключевых компонентов “Зонала” в металле просто не существовал. Сверхмощный и сверхкомпактный при этом двигатель, полый коленвал, система акустического самонаведения, радиовысотомер – все это еще только предстояло разработать, спроектировать и построить. И, естественно, никто не мог поручиться, что эти высокотехнологичные компоненты будут работать именно так, как от них требуется. Многие необходимые технологии достигли требуемого для “Зонала” уровня совершенства только десятилетие спустя. И это при том, что уже полным ходом шли испытания макетов торпеды в аэродинамических трубах и гидродинамических бассеинах!
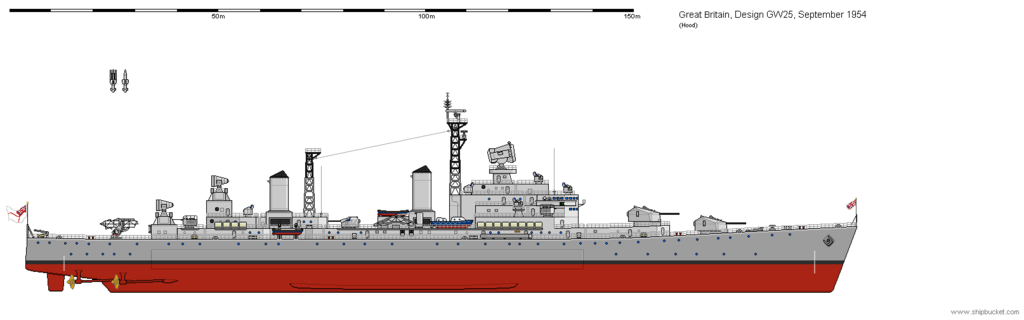
Ракетно-артиллерийский крейсер проекта GW25 (1954 год) — предполагавшийся носитель «Zonal»
По сути дела, разработка “Зонала” шла задом-наперед: вместо того, чтобы сначала спроектировать а затем начать делать, создатели летающей торпеды сначала начали ее делать, а затем уже приступили к проектированию. Как с иронией отметил главный научный консультант торпедного департамента, “работы конца 1940-ых были посвящены попыткам воплотить в жизнь научную фантастику”. В 1947 году, вся программа “Z-оружия” была закрыта. Тем не менее, вложенные средства не пропали даром, так как проектно-конструкторские работы над “Зоналом” дали британским инженерам ценный опыт и множество практических наработок для применения в других, более реалистичных системах.
Zannet
“Зонал” был не единственным парадоксальным порождением “Z-программы”. И даже не самым футуристичным. Параллельно с ним, инженеры департамента торпедного оружия работали над поистине не имеющим аналогов оружием, названным “Заннет”.
Это был, по определению создателей, “беспилотный амфибийный торпедоносец”. Запущенный с корабля, или же самолета, он должен был добираться до цели по воздуху, приводняться, затем погружаться под воду, сближаться с целью по командам оператора, и выпускать в цель самонаводящуюся торпеду. Задача, впечатляющая даже для современной техники – которую британцы собирались решить на вакуумных лампах и электромеханике!

По форме, “Заннет” напоминала небольшую субмарину, с сигарообразным корпусом и отвесным долотообразным носом. Для перемещения по воздуху, она была оснащена складным бипланным крылом, убиравшимся после приводнения в ниши на корпусе. Неясно, почему крыло не было сделано просто сбрасывающимся после приводнения – едва ли амфибия должна была повторно подниматься в воздух!
В движение беспилотную амфибию приводил поршневой двигатель, работающий на сжатом воздухе и метаноле. Создатели “Заннет” явно не хотели дополнительно усложнять свое и без того переусложненное детище, и вместо “единого” пропеллера с коробкой передач (как у “Зонала”) просто установили на нее два винта. Один служил только для передвижения в воздухе, другой – только в воде.
Управление беспилотной амфибией предполагалось осуществлять по радио. Оказавшись в воде, “Заннет” поднимала мачту с антенной, и оператор направлял ее к цели. Для обнаружения цели использовалась некая абстрактная “акустика”. Как именно выполнялось наведение “Заннет” на цель, не вполне ясно. Маловероятно, что подобное оружие могло как-либо визуально отслеживаться с самолета. Предположительно, беспилотная амфибия ретранслировала по радио оператору данные со своих акустических систем, и оператор уже выполнял сопоставление сигналов с гидрофонов и наводил “Заннет” на цель (своего рода, “командное наведение через торпеду”).
Вооружалась “Заннет” самонаводящейся торпедой, расположенной в пусковой трубе внутри корпуса. Перед запуском, “Заннет” открывала дверцы в носовой части, затапливала трубу, и выпускала торпеду самовыходом. Поскольку торпеда была лишь полезной нагрузкой, а не интегральной частью конструкции, ее наведение выполнялось независимо и не представляло такую же масштабную проблему, как в случае с “Зоналом”.
Но, как и в случае с “Зоналом”, работы над “Заннет” не вышли за стадию макетов для гидродинамических испытаний. Очевидно было, что “Заннет” выходит далеко за пределы возможностей не только существующей, но и перспективной (!) технологии. Хотя ничего принципиально невозможного проект беспилотной амфибии не содержал, даже его авторы не были уверены, что “Заннет” можно довести до ума раньше, чем она морально устареет. В 1947, работы по ней прекратили вместе со всей программой “Z-оружия”. Британское адмиралтейство получило ценный урок – “погоня за вундерваффе себя не оправдывает” – и благоразумно сосредоточилось на более практичных решениях.
Источники
- A history of the torpedo (parts 3-4) — G. J. Kirby, Journal of the ROYAL NAVAL SCIENTIFIC SERVICE, Vol. 27 (1972), pp 78-106.
- Патент UK582845 Improvements in or relating to marine torpedoes launched from aircraft — C.D. Burney, 1939.
- Nevil Shutte Norway foundation.
- Torpedo: The Complete History of the World’s Most Revolutionary Naval Weapon — Roger Branfill-Cook, Seafort Publishing (2014)
- The Last Torpedo Flyers: The True Story of Arthur Aldridge, Hero of the Skies — Arthur Aldridge, Mark Ryan, Simon & Schuster (2013)
- The Churchill War Papers: At the Admiralty, September 1939-May 1940 — Winston Churchill, Martin Gilbert (1993)
Музыка
Прицепляйте торапланы, время грабить корованы…
источник: https://fonzeppelin.livejournal.com/67726.html
")


