
Приборы управления торпедной стрельбы, они же директоры торпедной стрельбы, они же счётно-решающие приборы времён ВМВ ВМФ США
Первым электромеханическим прибором, используемым для управления торпедной стрельбой был американский Torpedo Data Computer (TDC) — наиболее близкий перевод «Компьютер Торпедных Данных».
Данная система была разработана для замены стандартных директоров торпедной стрельбы типа «банджо», которые представляли из себя механические калькуляторы(нечто вроде логарифмической линейки)(Илл. 1).
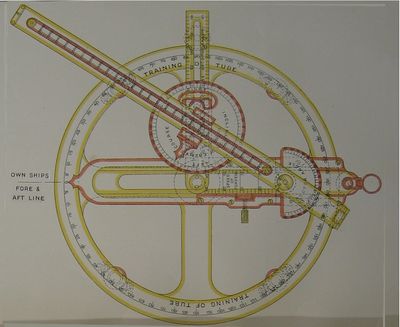
Иллюстрация 1.
Визуально выглядел как стенд, с большим количеством циферблатов, рукояток и переключателей(Илл.2). Располагался в большинстве случаев на центральном посту.
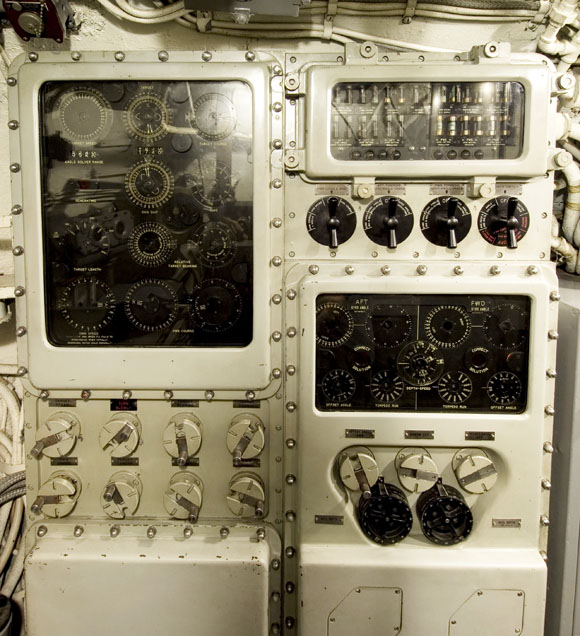
Иллюстрация 2.
Устройство требовало введения следующих данных:
Данные о платформе — т.е. данные о носителе оружия, подводной лодке, а именно курс и скорость движения. Эти данные поступали в автоматическом режиме с гирокомпас лодки и питометра(разновидность трубки Пито, прибор для изменения скорости потока) соответственно;
Данные о цели — курс цели, скорость цели, и расстояние до цели. Эти данные, поступали с приборов наблюдения — перископа лодки(в подводном положении) или мощного вращающегося устройства(Target Bearing Transmitter, сокр. TBT), по сути — буссоли, т.е. соединения воедино компаса, азимутального круга и бинокля.(в надводном положении). В дальнейшем, с развитием гидролокации данные о цели поступали с сонаров(при помощи Sound Bearing Conventer, сокр. SBC).
Данные о поражающем элементе, т.е. Торпеде — тип торпеды, скорость движения, глубину хода. Устройство позволяло использовать различные типы торпед.
Получая входящие данные устройство решало тригонометрические уравнения(Илл.3), и автоматически устанавливало требуемый угол гироскопов торпед, после чего торпеда была готовой к стрельбе. Вся операция занимала несколько секунд.
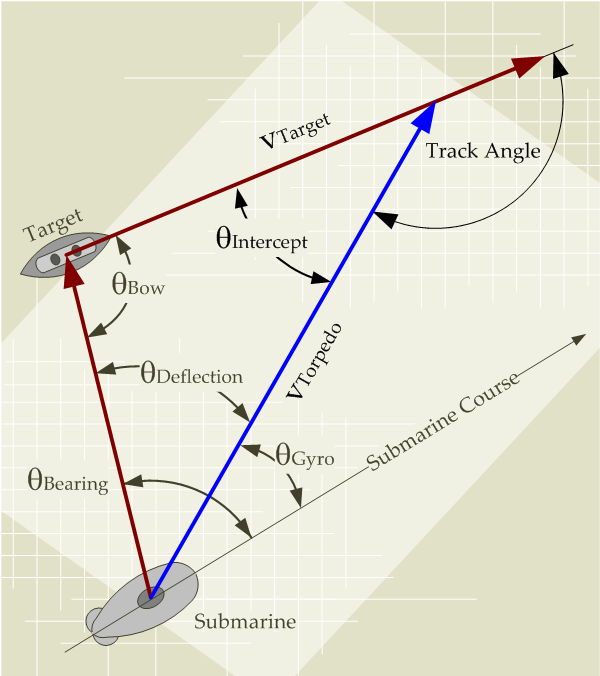
Иллюстрация 3.
История создания.
В 1932 г. Бюро Вооружений(Burea of Ordanance — BuOrd) США выдало заказ на разработку автоматизированной системы управления торпедной стрельбы(TDC) компаниям Arma Corporation и Ford Instruments. Система была создана достаточно быстро — первой лодкой, получившей TDC Mark I была SS-170 «Cachalot»(вошла в состав флота в октябре 1933г.). Начиная с этого момента устанавливалась в различных модификациях на все ПЛ US Navy, также установлена на лодку более старого проекта SS -169 “Dolphin” при модернизации. Первой специально спроектированной лодкой для использования TDC была SS-198 “Tambor”(вошла в состав флота в1940 г.)
Основной модификацией TDC была Mark III, доработанная для использования новых видов торпед и имеющая SBC. Последней, испольуемой в ВМВ Mark IV(доработана для использования торпед Mark 18).
Конструктивные особенности.
Главной конструктивной особенностью TDC является то, что он состоит из двух самостоятельных, но взаимосвязанных систем. Конструктивно прибор является электромеханическим, входящие данные от различных устройство ввода преобразовывались в электрические сигналы, затем эти сигналы передавались на устройство вывода информации — цифеблаты, указатели, индикаторы, счётчики; преобразование осуществлялось элекромеханическим способом(что-то вроде электрических счётчиков старых образцов, только гораздо сложнее)(Илл. 4-8).

Иллюстрация 4.
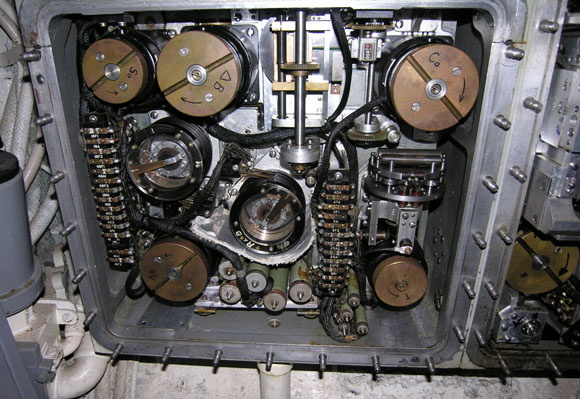
Иллюстрация 5.
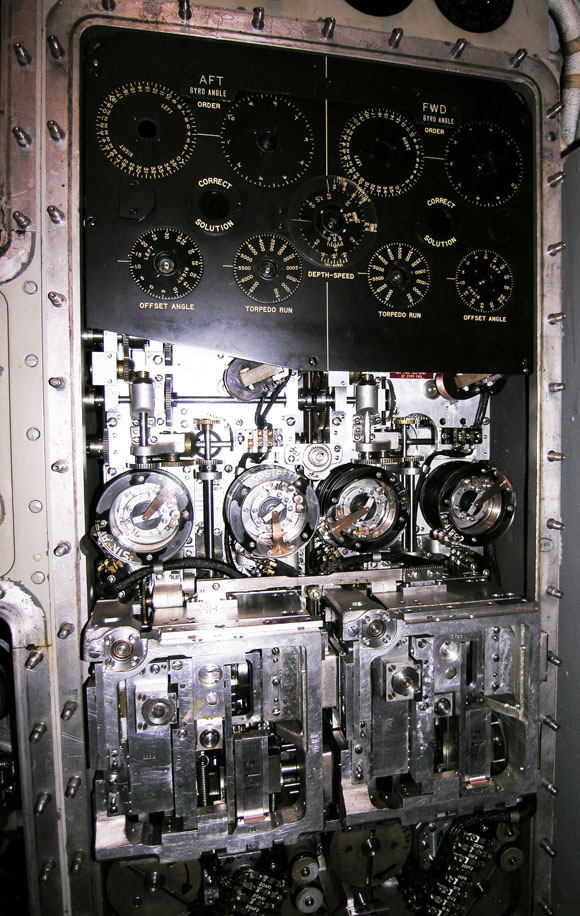
Иллюстрация 6.
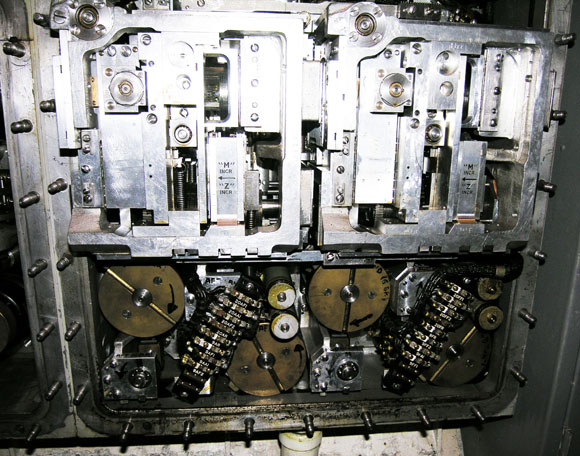
Иллюстрация 7.
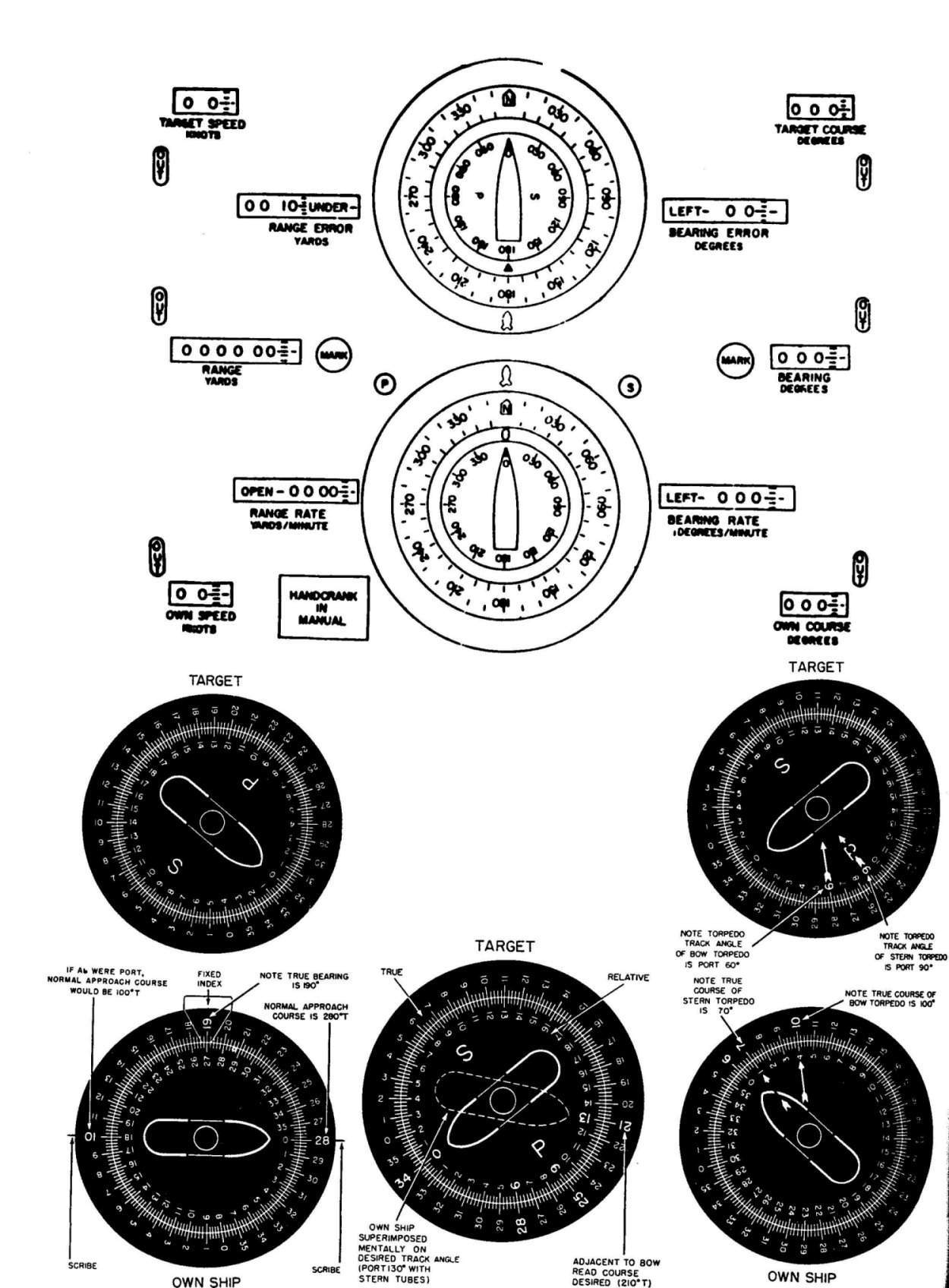
Иллюстрация 8.
Отображение было весьма наглядным, в режиме реального времени можно было видеть скорость цели, курс, а также данные о взаимном расположении своего корабля и корабля-цели, т.е. пеленг на цель. Выражаясь современным языком, это была система обнаружения и слежения за целью. Это и являлось первой самостоятельной системой. Второй системой была система расчёта и установки требуемого угла гироскопа торпеды. Используя данные от системы наведения и слежения, а также данные торпеды, она решая тригонометрические уравнения(опять же, использовался механический калькулятор, что-то вроде логарифмической линейки, только взаимное перемещение частей этой «линейки» было механизированно), полученные данные предавались в торпедный отсек, где толкателем устанавливался угол гироскопа. Вручную этого делать было не нужно. После этого торпеда была готова к стрельбе. Система контролировала все(обычно 10) торпедные аппараты, для носовых и кормовых торпедных аппаратов имелись свои калькуляторы. В расчётах учитывалось разница в расположении точки прицеливания и точки стрельбы(расстояние определялось с боевой рубки, а торпедные аппараты находились в носу/корме лодки), реальная траектория движения торпеды(т.е. то, что торпеда не сразу наберёт максимальную скорость и не сразу ляжет на боевой курс)(Илл. 9), эффект параллакса. На современном языке вторая система — это система наведения и целеуказания.

Иллюстрация 9.
Основной особенностью TDC, безусловно, являлась система обнаружения и слежения. Эта система позволяла лодке во время проведения атаки активно маневрировать, быстро изменять свое положение относительно цели, осуществлять в коротки промежуток времени несколько заходов на цель. Само понятие «лодка заняла позицию для атаки», обрело новый смысл. Эта система ВМФ США была новаторской для своего времени, ничего подобного другие флоты не имели. Что же касаемо системы целеуказания, то ничего подобного, о ней сказать нельзя. Она была одной из многих, и далеко не лучшей из подобных систем стран участниц ВМВ. Однако бросать камень в огород разработчиков было бы несправедливо — для тех торпед, что стояли на вооружении ВМФ США к началу ВМВ, и эта система была избыточной. Но это уже совсем другая история;-)
Источники:
http://www.maritime.org/doc/attack/index.htm
http://www.navsource.org/archives/08/08198.htm
http://maritime.org/tech/tdc.htm
http://www.fleetsubmarine.com/sublist.html
http://www.dreadnoughtproject.org/tfs/index.php/Torpedo_Deflection_Sight_Mark_II#Alterations
Кое-какие картинки взяты с
http://en.wikipedia.org/wiki/Torpedo_Data_Computer



