
Телеуправляемые красноармейцы: управляемые торпеды и субмарины

Телеуправляемые красноармейцы: управляемые торпеды и субмарины
Содержание:
Исторически, первым автономным и первым управляемым оружием стали именно торпеды. Еще в 1870-ых, американец Джон Льюис Лэй создал оригинальную торпеду, управляемую с берега по кабелю. Торпеды Лэя привлекли внимание многих стран (включая Российскую Империю, которая даже купила лицензию на их производство), и применялись (правда, безуспешно) в боевых действиях во время войны Перу и Чили. За ней последовали и другие. К началу XX века, практически каждый уважающий себя инженер считал долгом изобрести управляемую по проводам торпеду, а наиболее передовые уже начали экспериментировать с радио.
Тем не менее, к Первой Мировой Войне интерес к управляемым торпедам изрядно угас. Казалось бы, странно – ведь технология дистанционного управления бурно развивалась в это время! – но на самом деле, достаточно объяснимо. С увеличением скоростей и дистанций морского боя, отслеживание движущейся в воде торпеды стало значительной проблемой для ее оператора. Использование сигнальных ламп, дымовых сигналов и т.д. создавало противоречие: торпеда, хорошо видимая для оператора, по мере приближения к цели стала бы хорошо заметна и для неприятеля, который непременно попытался уклониться.
“Второе дыхание” идее управляемой торпеды дало развитие авиации. Фундаментальным недостатком самолетов-торпедоносцев было то, что для успешной атаки они должны были подходить к цели на малой высоте, над самой водой – становясь при этом легкой мишенью для зенитного огня и истребителей. Радиоуправляемая торпеда, которую можно сбросить с большой высоты (на парашюте) и направить в цель после приводнения, казалась оптимальным выходом из положения.
РАДИОУПРАВЛЯЕМЫЕ ТОРПЕДЫ
Как уже упоминалось ранее, основные надежды при обороне от нападения с моря, Советский Союз возлагал на торпедоносную авиацию. Ее фундаментальные недостатки – высокая уязвимость атакующих на малой высоте торпедоносцев – прекрасно осознавалась советскими военными. Особенно от этого страдали медлительные двухмоторные бомбардировщики ТБ-1, а затем и тяжелые четырехмоторные ТБ-3.

ТБ-3 сбрасывает торпеду. Видно, что не слишком-то хорошо у него это получается
Специально для этих самолетов, инженерами Остехбюро в начале 30-ых, была разработана высотная авиационная торпеда ТАВ-15. (Торпеда Авиационная Высотная). Предназначенная для применения с тяжелых бомбардировщиков ТБ-3, эта 45-см торпеда должна была сбрасываться с большой высоты и мягко приводняться на парашюте. Вполне естественно, что при парашютной посадке ни о каком прицеливании не могло быть и речи – было ведь совершенно непонятно, как именно приводнится торпеда – и поэтому автопилот ее был установлен на движение по кругу. Вероятность попадания на циркуляции, разумеется, была очень мала, что ограничивало применение ТАВ-15 специфической ситуацией сброса на конвой или неприятельскую эскадру, “по площадям”. Не столько даже в надежде кого-нибудь реально потопить, сколько чтобы нарушить построение, заставить корабли противника уворачиваться от циркулирующих торпед – и стать легкой добычей для атакующих следом обычных торпедоносцев.
Оснащение ТАВ-15 системой радиоуправления, однако, позволяло бы превратить высотную торпеду в грозное оружие. Наблюдая за приводнением торпеды сверху, оператор на борту самолета-носителя мог бы сориентировать ее командами “вправо” и “влево”, и направить точно в неприятельский корабль. Учитывая дальность и большую нагрузку ТБ-3, радиоуправляемые торпеды могли превратить его в грозное оружие.
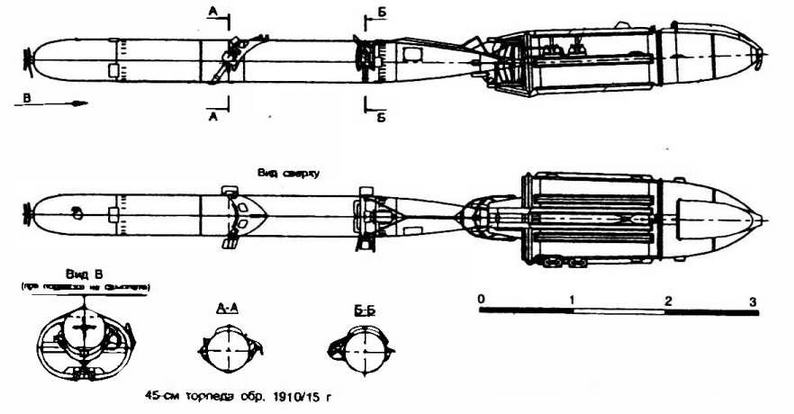
Высотная парашютирующая торпеда ТАВ-15
Проект оснащения ТАВ-15 радиоуправлением получил название РУТ, что расшифровывалось просто как “РадиоУправляемая Торпеда”. Разработкой его занималось Остехбюро Наркомата Обороны – “профильная” организация под началом Владимира Ивановича Бекаури, специализировавшаяся на разработке новаторского, экспериментального вооружения.
Точного описания системы управления ТАВ-15РУТ не сохранилось. Но можно предположить, что это была довольно простая радиокомандная система (в конце концов, от нее требовалось исполнять ровно две команды, “вправо” и “влево”!), использующая акустическую модуляцию сигнала на несущей частоте. Команды, вероятно, задавались акустическими тонами, которые передавались по-радио на борт торпеды, там распознавались (либо с помощью ламповых фильтров, либо – еще проще – с помощью пары узкополосных микрофонов) и замыкали реле, управляющее механизмами, смещающими в ту или иную сторону рамку курсового гироскопа торпеды.
Для отслеживания РУТ при движении в воде, точного определения ее курса и ориентации в пространстве, на корпусе торпеды устанавливались сигнальные огни. Неясно, использовались ли при этом лампы видимого света, или инфракрасные (чья работа была бы незаметна для противника). Есть также упоминания, что для отслеживании торпед в воде применяли дымовые сигналы.
Впервые на испытания радиоуправляемая торпеда вышла в октябре 1933 года. Судя по всему, это было всего лишь “демонстратор технологии” – серийная торпеда, на которой боевую часть заменили аппаратурой радиоуправления. Торпеду применили на маневрах Балтийского Флота, в ходе которых отрабатывались комбинированные удары торпедоносной и миноносной авиацией, а также торпедных катеров по крупным кораблям противника. По отзывам маршала Тухачевского, торпеда показала “изумительную” меткость, что и вдохновило Остехбюро на дальнейшие разработки в этой области.
В ряде источников встречаются также упоминания радиоуправляемых торпед “Акула-1” и “Акула-2” как отдельных проектов – но, по всей видимости, это были лишь иные обозначения для разных вариантов все той же РУТ.
Первые предсерийные образцы советских радиоуправляемых торпед поступили на заводские испытания в августе 1935 года. Эксперименты с торпедами проводились на Онежском озере. Судя по имеющимся данным, торпеды запускались с берега, а с самолета только отслеживались. После прохождения испытаний, небольшая партия торпед была заказана промышленности.
Серийная ТАВ-15 под ТБ-3. Примерно также крепилась и ТАВ-15РУТ
Однако, несмотря на достигнутые результаты, интерес к радиоуправляемым торпедам довольно быстро пропал. На то были вполне объективные причины. Чтобы надежно видеть торпеду, самолет-носитель должен был оставаться в непосредственной близости от цели. Для сравнительно крупного и медлительного тяжелого бомбардировщика, вроде ТБ-3, это означало – превратиться в мишень для зениток и палубных истребителей.
Да и в целом, наблюдаемая визуально торпеда могла применяться только при очень хорошей видимости и высокой прозрачности относительно спокойной воды. Для СССР, такие условия можно было обеспечить (и то не всегда) разве что на Черном Море. На Балтике же, Дальнем Востоке и, тем более, на Севере, радиоуправляемая торпеда оказалась бы почти бесполезна. Именно поэтому, единственной нацией, принявшей на вооружение радиоуправляемые торпеды, была Италия – чьи интересы не выходили за пределы Средиземного Моря, с почти всегда оптимальными условиями видимости.
Рассматривалось также применение радиоуправляемых торпед с миноносцев и эсминцев. Но эти попытки натолкнулись на ту же самую проблему: плохая видимость торпеды. Кроме того, оператору, наблюдающему торпеду под острым углом с быстро движущегося корабля, даже при идеальной видимости было бы очень сложно определить – куда же именно она идет?
В конце 1930-ых, в связи с расформированием Остехбюро и репрессиями против конструкторского коллектива, работы над радиоуправляемыми торпедами прекратили и более не возобновляли. Внимание советских инженеров сосредоточилось на более перспективных проектах.
АКУСТИЧЕСКИЕ ТОРПЕДЫ
В СССР, первыми идею использовать физические поля корабля для автоматического наведения на него торпеды предложили специалисты МНИИ-1 в 1936 году. Перебрав несколько вариантов, они остановились на пассивном акустическом, как самом эффективном – звук прекрасно распространяется в толще воды – и самом простом в реализации. Инженеры НИМТИ согласились с их выводами, и рекомендовали начать разработку торпеды, автоматически наводящейся на собственные шумы двигателей неприятельского корабля.

Первый проект акустической торпеды САТ (Самонацеливающаяся Акустическая Торпеда) был составлен в 1936 году. Интересно отметить, что в основе системы управления лежали наработки Остехбюро по радиоуправляемой торпеде РУТ: вся исполнительная система и сервомеханика были заимствованы от предшествующего проекта, различался только источник управляющих сигналов. В 1938 году, опытный образец торпеды был представлен на испытания. Однако, ход разработки сильно задержал непредвиденный случай: в ходе опытных пусков в море, прототип торпеды умудрился потеряться, и отыскать его так и не удалось даже с помощью водолазов. Поскольку нельзя было понять, что же именно повлекло за собой потерю торпеды, инженеры были вынуждены де-факто повторить процесс разработки, чтобы убедиться в отсутствии принципиальных недостатков.
Для наведения, САТ использовала пару узконаправленных магнитострикционных гидрофонов (реагирующих на изменение проводимости материала, сжимаемого звуковыми волнами), размещенных на корпусе торпеды. Сигналы от гидрофонов сопоставлялись с помощью логического контура, управлявшего через поляризованное реле прибором Обри. Релейная система, как уже упоминалось выше, была полностью заимствована от проекта РУТ. По всей видимости, торпеда использовала простое (не-пропорциональное) наведение “все-или-ничего”, т.е. просто поворачивала в сторону слабейшего сигнала на одном из гидрофонов.
Некоторые источники упоминают, что САТ должна была наводиться только на заключительном участке своей траектории – то есть поначалу шла, как обычная прямоидущая торпеда, и лишь пройдя заданное расстояние, включала головку самонаведения. Такое решение было бы достаточно логично, с учетом того, что САТ предполагалось применять не только с субмарин, но и с надводных боевых кораблей и катеров. Включение самонаведения только на подходе к цели позволяло избежать “неприятных” ситуаций с попытками торпеды навестись на запустивший ее корабль, как самую “громкую” мишень (подобные случаи имели место на ранних немецких акустических торпедах).
С началом войны, программу САТ решили “перезапустить”. К работе над проектом приступило созданное в 1942 году Специальное Конструкторское Бюро (СКБ), группу инженеров возглавил В.Д. Чижов (будущий глава КБ-1).
В 1942 году, головка самонаведения САТ поступила на испытания. Для экспериментов, флот выделил три серийные торпеды 53-38, которые переоснастили в управляемые.
Однако, испытания дали крайне разочаровывающий результат. Двигатель поршневой парогазовой торпеды 53-38, использовавшейся в качестве основы для САТ, слишком громко шумел, и его работа почти полностью заглушала на гидрофонах шум, собственно, цели. Попытки снизить уровень шума – даже ценой снижения скорости до 30 узлов – не дали адекватного результата. Чувствительность торпеды оставалась слишком низкой для практического применения.

Теоретически, решить проблему было возможно, установив головку самонаведения от САТ на электрическую торпеду ЭТ-80. Ее электрический двигатель производил значительно меньше шума, чем поршневой двигатель 53-38. Однако, эта новейшая торпеда была разработана перед самой войной, поступила на вооружение только в 1942 году, и производилась лишь в очень небольших количествах. В результате, до 1944 года, значимого прогресса с САТ так и не было достигнуто.
И тут вмешался случай. В распоряжении советских инженеров появились образцы немецкой акустической торпеды G7es “Цаукенинг”, с потопленной советскими катерами-охотниками субмарины U-250. Затонувшая на мелководье субмарина была (несмотря на отчаянные попытки немцев этому помешать) поднята с помощью понтонов, и отбуксирована в Кронштадт. Помимо секретных документов, шифровальных машинок и прочей информации, на борту U-250 обнаружили несколько новейших самонаводящихся торпед.
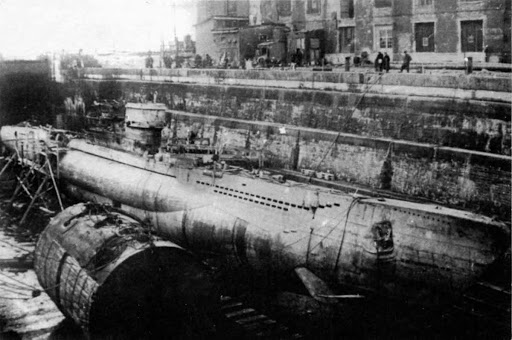
Трофейная U-250 в доке Кронштадта
Наличие образцов уже отработанного, готового к применению немецкого оружия привело к решению остановить работы над САТ – которая находилась все еще в низкой степени готовности, и требовала немало времени на доведение до ума. Дальнейшие работы сосредоточились в основном на изучении трофейного немецкого наследия, и адаптации его к советской технологии.
БЕСПИЛОТНЫЕ СУБМАРИНЫ
Экспериментами в отношении управляемых по радио торпед Бекаури, впрочем, не ограничился. В середине 1930-ых в Остехбюро возник более амбициозный план: создать сверхмалую беспилотную субмарину, достаточно компактную, чтобы ее мог доставить к цели тяжелый самолет-амфибия.
При всей внешней абсурдности, идея аэротранспортабельной субмарины была, на самом деле, довольно изящна. В случае войны с сильной морской державой, выход советских подводных лодок на морские коммуникации был бы сильно затруднен узостями Финского Залива, закрытостью Босфора и удаленностью северных морских баз. Большая летающая лодка легко могла преодолеть морскую блокаду, и высадить маленькую субмарину в нужной точке океана – например, на пути вражеского конвоя или вблизи неприятельской ВМБ.
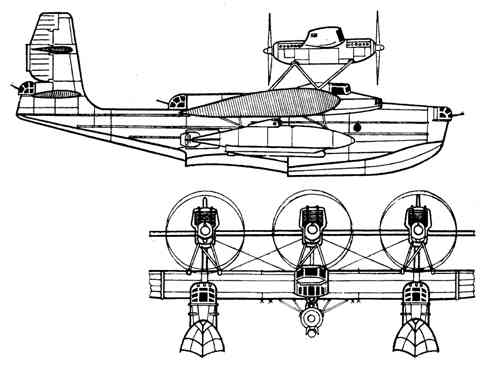
Разработанная под руководством К.В. Старчикова сверхмалая субмарина получила название АПСС – которое расшифровывалось как “Аэро-Подводный Самодвижущийся Снаряд”. В качестве носителя для нее, должен был выступать могучий МК-1 “Морской Крейсер” – шестимоторная двухкорпусная летающая лодка, спроектированная в ЦАГИ в начале 1930-ых. Впервые поднявшийся в воздух в 1934 году, этот огромный самолет-амфибия, предназначавшийся для дальнего морского патрулирования и нанесения торпедно-бомбовых ударов, поставил несколько мировых рекордов грузоподъемности.

«Морской крейсер» МК-1
Стандартная бомбовая нагрузка МК-1 составляла шесть тонн. В перегруз, в рекордных полетах, он поднимал вдвое больше – от десяти и до тринадцати тонн. Представлялось вполне возможным вписать в этот вес маленькую субмарину, которую могучая летающая лодка доставила бы к цели, и при необходимости – забрала бы обратно.
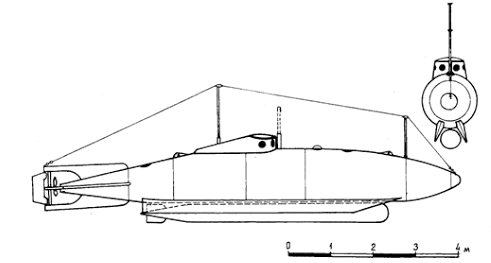
По конструкции, АПСС была однокорпусной сверхмалой подводной лодкой сигарообразной формы, с небольшой выступающей герметичной рубкой. Водоизмещение ее составляло 8 тонн, при длине в 10 метров и ширине 1,25 метра. Корпус ее был изготовлен из стали (один прототип был сварным, второй клепанным) и разделялся на пять изолированных отсеков.
Первый (считая с носа) отсек являлся балластным и служил для уравновешивания субмарины. В беспилотном варианте, в нем также размещалась боевая часть.
Второй с носа отсек служил для размещения носовой полубатареи аккумуляторов на 33 элемента.
Третий отсек располагался под рубкой и являлся секцией управления. В нем размещалось место пилота (который сидел, выставив голову в рубку), вся аппаратура ручного и автоматического управления, и балластные цистерны.
В четвертом отсеке размещалась вторая, кормовая полубатарея, и пневматические приводы рулей.
Пятый (кормовой) отсек служил моторным. В нем находился электродвигатель мощностью 8,1 киловатт, вращавший единственный винт. Скорость субмарины достигала 4,5 узлов, дальность хода в погруженном положении – 45-50 км. Из-за низкой устойчивости субмарины и высокого расположения гребного винта, надводный ход считался “нештатным”.
Баллоны высокого давления со сжатым воздухом для всплытия, дыхания пилота (при наличии такового, разумеется) и привода рулевых машинок, размещались снаружи прочного корпуса АПСС, в накладных килях. Между килями была установлена подвеска для торпеды.
Точного описания системы управления мне найти не удалось, но упоминается, что она использовала шифрованные сигналы, преобразовывавшиеся в “посылки постоянного тока, управляющие элементами автоматики снаряда” (c). Что именно под этим подразумевалось, кроме того, что система работала на постоянном токе, понять довольно трудно. Но по всей видимости, Бекаури использовал “шифрование” сигнала акустической модуляцией, чтобы затруднить противодействие. А конкретная команда задавалась последовательностью принятых импульсов (прошедших соответствующий фильтр) на шаговом искателе, смещавшемся на деление от каждого импульса.
Например, один принятый подряд импульс смещал искатель на первую позицию и замыкал исполнительное реле, соответствующее команде “вправо”. Два импульса – на вторую позицию, соответствующую команде “влево”, и так далее. По имеющейся информации, АПСС мог исполнять до 24 команд. Из этого можно предположить, что система управления использовала два последовательно подключаемых 5-позиционных селектора, а каждая команда задавалась последовательно передаваемыми двумя цифрами, от 1 до 5.
Система управления включала два приемника, для УКВ и ДВ-диапазонов.
* При движении на поверхности, лодка принимала команды в коротковолновом диапазоне.
* При погружении на небольшую глубину (до 3 метров) система управления автоматически переключалась на длинноволновый передатчик, волны которого лучше проникали сквозь толщу воды.
* Наконец, при погружении на большую глубину (до 10 метров) субмарина не могла более принимать команды, и переключалась на автономное программное управление.
Программы эти были установлены механически и сводились к наборам операций вроде “погрузиться, двигаться полчаса в заданном направлении, всплыть для связи”, задаваемых с помощью механического таймера. Варианты программ могли включать и сложный курс с несколькими маневрами по пути – в этом случае управление рулем соединялось с механическим датчиком-колесиком, движущимся (по таймеру) по извилистой канавке, проделанной в деревянной пластинке. Смещения датчика на изгибах соответствующим образом поворачивали перо руля, позволяя АПСС выполнять запрограммированные маневры. Оператор мог выбирать между несколькими вариантами предварительно заданных программ, например чтобы провести АПСС мимо внешнего охранения конвоя.
* Имелось также ручное управление – при котором “ввод” автоматики просто переключался с дешифратора, на штурвал и рычаги в небольшой кабине пилота. Ручное управление предполагалось использовать в тех случаях, когда автоматическое было неэффективно (например, при плохой видимости), или когда задача была слишком сложна для дистанционного управления (например, дождаться открытия прохода в заграждениях, чтобы проскользнуть в охраняемую акваторию). Однако, ручное управление было «нежелательно» из-за необходимости возвращать субмарину с пилотом — что более чем вдвое сокращало и без того невеликую дальность.
Для отслеживания подводной лодки с воздуха в ночное время, в ее “спину” были встроены иллюминаторы, за которыми находились мощные фары, направленные вверх. В дневное время, вместо этого использовался баллон с зеленым фосфоресцирующим составом, оставлявшим за погруженной субмариной ясно различимый след. Наконец, имелся также установленный перед рубкой аварийный буй с дистанционно управляемой сигнальной лампой и телефоном, который пилот (при наличии на борту) мог использовать для связи с поверхностью.
Подвеска АПСС под МК-1
Поскольку возможность точного пуска торпед в беспилотном варианте вызывала серьезные сомнения (нельзя было точно определить, куда именно смотрит нос лодки, да и решение торпедного треугольника с летящего где-то сбоку самолета стало бы дикой головной болью), вместо торпед телеуправляемую АПСС предлагалось вооружить зарядом в 360 кг (в других источниках – 550 кг) взрывчатки. В этом случае АПСС сам превращался в телеуправляемую торпеду, которая подходила близко к цели, и затем взрывалась. Гидродинамический удар от мощного подводного взрыва мог серьезно искалечить любой боевой корабль. В пилотируемом же варианте, АПСС должна была нести под корпусом одну 45-см торпеду.
В 1935 году, два прототипа АПСС были заложены на заводе “Судомех” в Ленинграде. Один прототип имел клепаный корпус, второй – сварной, и предполагалось оценить, какая технология сборки лучше подходит для подобного оружия. Обе лодки успешно прошли заводские испытания, однако на флотские, судя по всему, так и не поступили. В официальных документах упоминается, что “проблема дистанционного управления этой лодкой была далека от положительного решения” – т.е. по всей видимости, работала крайне ненадежно и часто ломалась. В 1936 году, все работы по АПСС прекратили, а обе готовые лодки разобрали. Дальнейшие работы продолжили над более крупной, уже чисто пилотируемой, аэротранспортабельной субмариной АПЛ (Аэро-Подводная Лодка), бывшей конкурирующим проектом.
P.S. Представляется вероятным, что помимо чисто технических проблем, на судьбе АПСС сказалась и другая специфическая – доступность всего одного-единственного экземпляра носителя. Огромные многокорпусные летающие лодки вроде “Морского Крейсера” стоили дорого, были сложны в обслуживании, а их полезность для СССР была весьма ограничена. Строить такие дорогие машины исключительно под ношение сверхмалых субмарин было просто непрактично. А без крылатого носителя, способного доставить его в нужную точку акватории, АПСС терял все свои преимущества, превращаясь просто в не очень удачную сверхмалую субмарину.
ИСТОЧНИКИ
* Авиация Красной Армии — Козырев М.Е. (2011)
* Александр Иванович Шокин: портрет на фоне эпохи — А. Шокин (2017)
* Самолеты-гиганты СССР — В. Р. Котельников (2009)
* Сверхмалые подводные лодки. 1914-2004 — А.Е. Тарас (2004)
* Торпеды ВМФ СССР — Ю. Л Коршунов, А. А. Строков (1994)
* Торпедоносцы Великой Отечественной — М. Морозов (2011)
ПРИЛОЖЕНИЕ
источник: https://fonzeppelin.livejournal.com/147054.html



