
Телеуправляемые красноармейцы: катера волнового управления
Содержание:
ПРЕДИСТОРИЯ
Как уже упоминалось выше, возможность атаки с моря на Кронштадт и Ленинград была постоянной головной болью для советских военных. С утерей в 1918 оборонительных позиций по берегам Финского Залива, второй по важности город СССР оказался де-факто открыт для нападения неприятельского флота.
Основные надежды в обороне морских подступов, СССР возлагал на “малый флот”, в первую очередь – на подводные лодки и торпедные катера. Порождение прогресса в области двигателей внутреннего сгорания, торпедный катер был возвращением к оригинальной концепции миноносца: маленького, стремительного кораблика, способного преодолеть заградительный огонь цели за счет крошечных размеров, малой заметности и высокой маневренности. Появившиеся в годы Первой Мировой Войны, торпедные катера успели зарекомендовать себя с самой лучшей стороны, в частности, потопив в Адриатике австрийский дредноут “Сен-Иштван”.
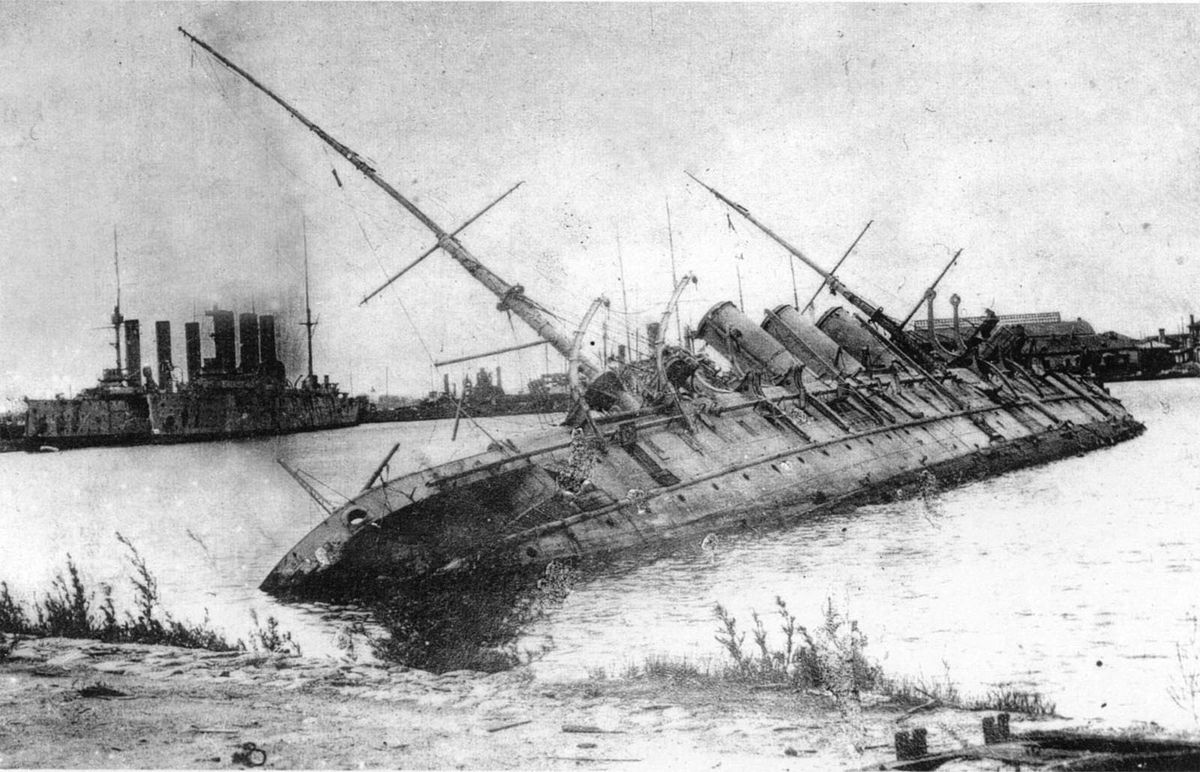
Большевики с торпедными катерами познакомились самым прямым образом – в лихом налете на Кронштадт в 1919 году, британские торпедные катера потопили старый крейсер “Память Азова” и искалечили линкор “Андрей Первозванный”. “Приказ исполнен – спасенных нет” (с)
В мелких водах Финского залива, маневрируя среди минных банок, торпедные катера представлялись грозным оружием, вполне способным бросить вызов даже могучим дредноутам Великобритании и Франции. Однако было ясно, что реально эффективными торпедные катера могут быть лишь при согласованной атаке. И вот с ней-то и возникали вопросы: в атаку на Кронштадт, линкоры империалистов наверняка пошли бы под прикрытием внушительного охранения из эсминцев. Стремительные, маневренные, прекрасно вооруженные эсминцы были смертельными врагами торпедных катеров, закономерно рассматривая последних как хрупкую, уязвимую и почти беззащитную добычу. И даже если советские торпедные катера и сумеют прорвать охранение и нанеси удары по вражеским линкорам – их шансы вернуться домой были почти равны нулю…
Командование РККФ такие результаты совершенно не устраивали. И решение они видели в технологии. Еще в 1917 году, кайзеровский флот относительно успешно применял дистанционно управляемые взрывающиеся катера против британских мониторов у побережья Бельгии. Вскоре после окончания войны, в американском и британском флоте несколько старых линкоров были переоборудованы в радиоуправляемые корабли-мишени, предназначенные для обучения артиллеристов стрельбе по маневрирующим целям: эти огромные роботы могли исполнять весьма сложные по тем временам последовательности команд. Представлялось вполне разумным попытаться применить те же идеи к торпедным катерам, и встретить линкоры противника армадами бесстрашных и расходных роботов.

Первый советский торпедный катер АНТ-3 «Первенец»
В сентябре 1924 года, Особое Техническое Бюро (Остехбюро) под руководством Бекаури вывело на испытания радиоуправляемый “катер-торпеду” под названием “Пионер”. На тот момент это был не более чем демонстратор технологии, но и он привлек значительное внимание. Вскоре свой радиоуправляемый катер “Оса” продемонстрировал в Ленинграде инженер-связист А.Ф. Шорин, известный своими работами в области телевещания. Командование РККФ, ознакомившись с обоими экспериментами, признало их перспективными и выдало задание на разработку системы дистанционного (в терминологии 1920-ых, “волнового”) управления для серийного торпедного катера.
Основные надежды возлагались на работы могучего Остехбюро, располагавшего значительными ресурсами и почти неограниченным финансированием. Но для подстраховки, адмиралы также выдали параллельное задание Центральной Лаборатории Проводной Связи, под руководством Шорина. Обе системы были аналогичны по используемым решениям, но различались по концепции: система Остехбюро предполагала, что оператор управляет катерами с борта другого корабля или катера, определяя их взаимное положение относительно цели с помощью электромеханического счетно-решающего устройства. Система же ЦЛПС размещала оператора на борту самолета управления, который управлял катером, наблюдая за ним сверху.
КОНСТРУКЦИЯ
Точного описания комплекса “волнового управления” торпедными катерами, к сожалению, не сохранилось. Но на основании имеющихся данных о функционировании системы (а также детальных описаний аналогичных систем иностранного производства – например, комплекса радиоуправления британского корабля-мишени “Агамемнон”) можно реконструировать ее отдельные компоненты с достаточной степенью достоверности.

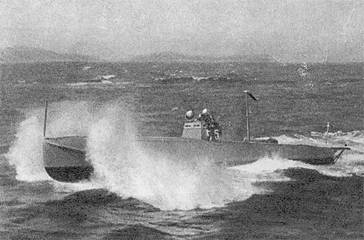
ВОЗМОЖНО торпедный катер волнового управления
Система “волнового управления” состояла из двух компонентов, приемно-исполнительной аппаратуры “Вольт” на борту катера, и командно-передающей аппаратуры “Кварц” на станции управления. Команды передавались по двум параллельным каналам: коротковолновому (КВ) и ультракоротковолновому (УКВ). Такая система позволяла отстроиться от поставленных неприятелем шумовых помех в одном из диапазонов связи. Кодировались команды в виде акустических тонов, передаваемых станцией “Кварц” на обеих несущих частотах.
На борту катера, аппаратура “Вольт” декодировала сигналы с помощью узкополосных камертонных фильтров. Прошедшие фильтры сигналы замыкали ламповые реле, тем самым подавая напряжение на исполнительные механизмы. Система отличалась высокой точностью распознавания команд, но сравнительно медленной реакцией, связанной с большим временем срабатывания камертонных фильтров.
Согласно имеющимся данным, аппаратура управления позволяла:
- Последовательное ступенчатое переключение скорости хода — от “стоп” и до “полный вперед”, посредством управления дросселями двигателей. Вероятно, осуществлялось с помощью шагового искателя, который при получении соответствующего сигнала сдвигался на шаг в нужном направлении.
- Выход на циркуляцию вправо и влево – а также стабилизация на курсе после поворота, с помощью гироскопического автопилота, основанного на торпедном курсовом гироскопе Обри.
- Поворот на определенный угол от текущего курса – имелись варианты поворота на угол в 1, 5 и 30 градусов. При этом команды могли суммироваться (например, поворот на 30 градусов влево и два поворота на 5 градусов вправо давали в итоге поворот на 20 градусов влево), что позволяло очень точно контролировать курс катера.
- “Виляние” – зигзагообразное движение катера, при котором автопилот поддерживал стабильный курс, но в его выходные данные вносилась систематическая ошибка, что заставляло катер вилять из стороны в сторону. Такое движение должно было сделать катер менее уязвимым для огня противника.
- Запуск торпед – вероятно, выполнялся прямо по курсу катера. Угол отклонения гироскопов торпед после запуска устанавливался параллельно курсу катера (хотя возможны были и варианты)
- Постановка дымовой завесы – неясно, была ли эта команда отдельной, поскольку для дымопускания (согласно имеющимся данным) предназначались не все, а только отдельные катера. Возможно, аппаратура постановки дымовой завесы подключалась к системе управления вместо команды запуска торпед.
Особенный интерес представляет система точного управления курсом катера. Исходя из имевшихся аналогов (“Агамемнона”) можно предположить, что в ней использовался т.н. командный диск, который поворачивался вправо и влево на соответствующее количество градусов – 1, 5 или 30 градусов — в соответствии с полученными по радио приказами. Автопилот воспринимал новое положение диска как сигнал рассогласования, и автоматически приводил к нему курс катера.
Такая система позволяла последовательностью сигналов задавать необходимый маневр с очень высокой точностью. Так, например, чтобы отвернуть катер на 54 градуса влево, последовательно передавали команды “30 влево”, “30 влево”, “5 вправо”, “1 вправо”. Командный диск, последовательно поворачиваясь, суммировал эти команды как +30+30-5-1=54, и останавливался на отметке в 54 градуса от исходного курса. Затем срабатывало реле, и автопилот приводил курс катера к установленному на командном диске.
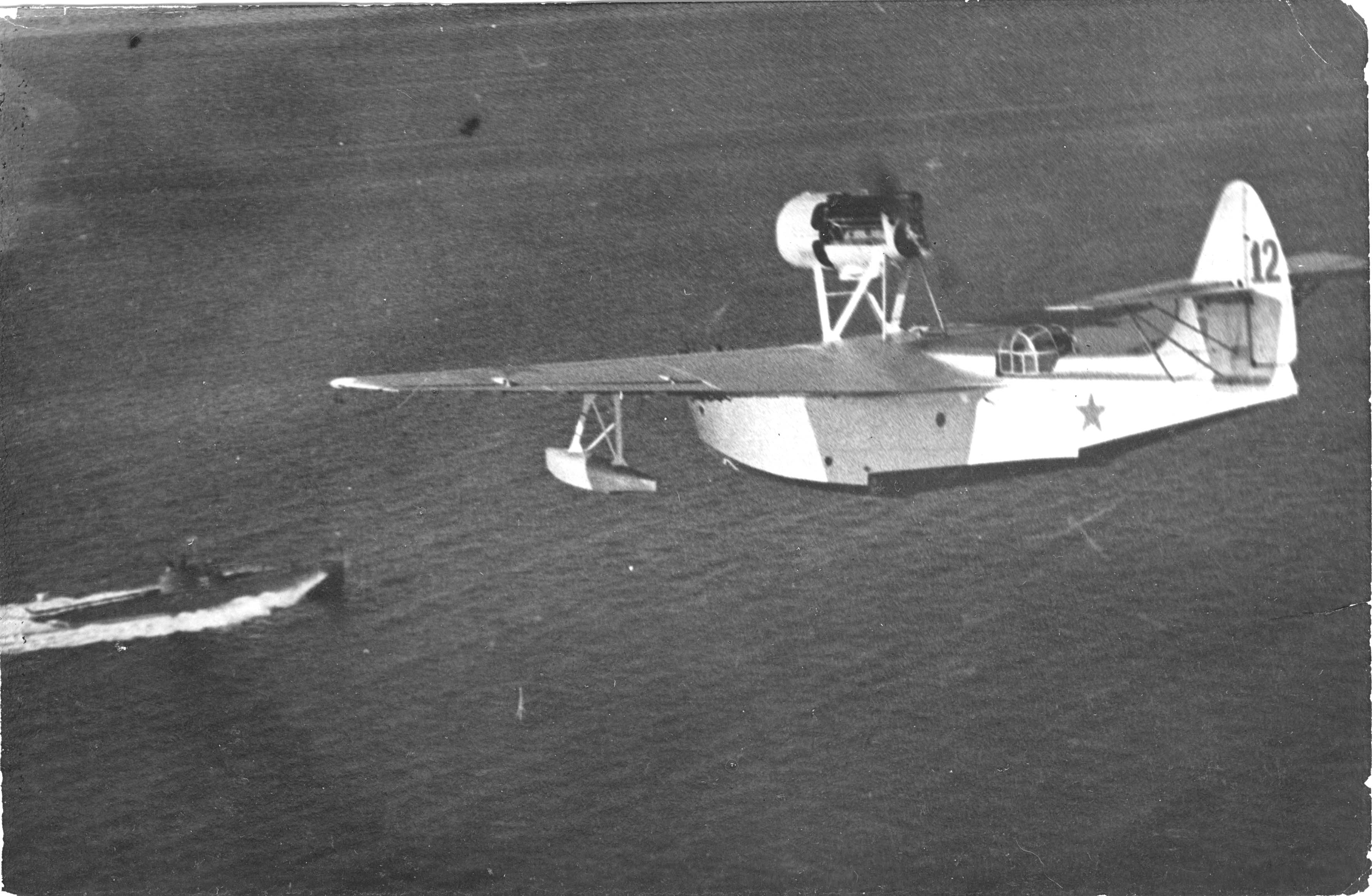
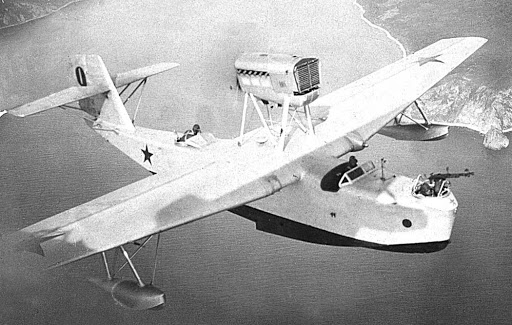
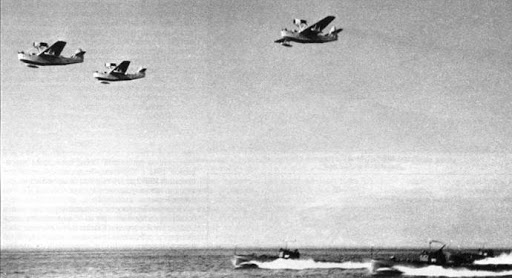
ВОЗМОЖНО самолет МБР-2 выводит в учебную атаку катер волнового управления
Выведение катеров на цель осуществлялось командами оператора. При этом, система Бекаури (разработки Остехбюро) включала специальный счетно-решающий прибор, который определял параметры движения цели по данным с корабельных директоров и рассчитывал курс для вывода телеуправляемого катера в атаку. По всей видимости, речь шла о построении курса пропорционального сближения катера с целью.
Система Шорина (разработки ЦЛПС) не нуждалась в такой сложной аппаратуре, поскольку в ней оператор находился на борту самолета и наблюдал за положением катера и цели сверху – и мог рассчитать угол выхода катера в атаку с помощью обычного планшета.
РАЗРАБОТКА И РАЗВЕРТЫВАНИЕ
В 1931 году, состоялись сравнительные испытания двух систем в Ленинграде. По результатам, предпочтение было отдано системе Шорина. Было отмечено, что хотя управление катерами-роботами с надводного корабля в системе Бекаури и дает определенные преимущества, они не могут компенсировать крайней сложности определения взаимного положения катера и цели, когда оператор находится в одной с ними плоскости. Наблюдение сверху значительно упрощало задачу. Кроме того, система Бекаури более зависела от условий видимости: всплески от снарядов, дымовые завесы или банальный туман легко могли привести к тому, что оператор на корабле терял катера из виду. В результате, весной 1932 систему Шорина рекомендовали к принятию на вооружение, а систему Бекаури отправили на доработку.
Работы шли медленно: серийное производство высокотехнологичной (по меркам времени) электроники оказалось настоящим испытанием для советской промышленности. Первые комплекты оборудования приходилось “доводить до ума” вручную, усилиями инженеров-разработчиков. Сначала аппаратурой радиоуправления оснастили 30 катеров Ш-4 (“Шарли”), затем производство переключилось на более новые Г-5. Общий выпуск электронной аппаратуры составил порядка 200 комплектов “Вольт”.
Аппаратурой “Вольт” оснащались торпедные катера типа Г-5 (глиссирующий, конструкции Туполева) и Ш-4. Хотя по ТТХ катера волнового управления соответствовали серийным, при постройке в их конструкцию закладывались определенные изменения, связанные с размещением аппаратуры телеуправления: это значило что катер “волнового управления” можно использовать как обычный пилотируемый, но обычный торпедный катер уже нельзя было взять, и переоборудовать в телеуправляемый.
Для управления катерами использовалась специальная модификация серийной летающей лодки МБР-2, получившая обозначение МБР-2ВУ (Волнового Управления). Она делалась на базе серийной летающей лодки с мотором М-34. В ее центральном отсеке разместили станцию управления “Кварц”, а экипаж пополнили двумя наблюдателями-операторами – предполагалось, что одна МБР-2ВУ сможет управлять сразу двумя телемеханическими катерами. В дальнейшем, для наведения катеров предполагалось использовать более современные морские и базовые самолеты.
Большой проблемой была ненадежность электронной аппаратуры катеров, которая сильно страдала от влажности (катера типа Г-5 в этом плане были особенно проблематичны, поскольку на ходу их постоянно захлестывало волнами). Так, на маневрах Балтийского Флота в 1937 году, из двенадцати радиоуправляемых катеров одного дивизиона, боеспособными поначалу оказались лишь восемь. В целом, по отзывам моряков, в боевой готовности редко когда находилось более половины катеров волнового управления.
В середине 30-ых “катера волнового управления” все же запустили в серийное производство. А уже в 1934 году было принято решение сформировать дивизионы катеров “волнового управления” (по 24 катера) в каждой из бригад торпедных катеров на трех основных флотах – Балтийском, Черноморском и Тихоокеанском. Для управления катерами-роботами были созданы специальные “особые авиаэскадрильи волнового управления” (ОАЭ ВУ), укомплектованные летающими лодками МБР-2ВУ. Первоначально на каждый флот полагалось по одному дивизиону и соответственно одной эскадрилье управления. В 1937 на Черном Море и Тихом Океане создали дополнительные эскадрильи управления, но уже в 1938 их расформировали.
В октябре 1937 года состоялись “зачетные” учения, во время которых “неприятельская” эскадра, вошедшая в Финский Залив, была показательно атакована с воды и с воздуха – в том числе и двумя волнами беспилотных катеров, наводимых с гидросамолетов. Несмотря на многочисленные отмеченные недостатки и сложности, было отмечено, что катера-роботы в состоянии выполнить поставленную боевую задачу – просто за счет невосприимчивости к потерям и численного перевеса.
БОЕВОЕ ПРИМЕНЕНИЕ
К началу войны, на Балтике, Черном Море и на Тихом Океане имелось в составе бригад торпедных катеров несколько дивизионов катеров волнового управления (преимущественно типа Г-5), для контроля которых использовались, соответственно, 58-я, 60-я и 63-я особые авиаэскадрильи. Также на ТОФ имелось семь отдельных дивизионов и семь отдельных авиационных звеньев волнового управления, полученных за счет расформирования 67-ой ОАЭ ВУ.

Однако, применить эту материальную часть оказалось не против кого. Немецкий флот и в мыслях не имел прорываться своими (крайне немногочисленными) линкорами к Кронштадту, и куда больше внимания уделял тому, чтобы не выпустить советские корабли за пределы Финского Залива.
На Балтике, катера волнового управления поначалу собирались применять в рейдовых операциях против немецкого судоходства. Однако, крайне тяжелый для СССР ход войны в воздухе в 1941 году привел к тому, что командование авиации не смогло изыскать истребители для сопровождения самолетов управления. А без прикрытия, медлительные летающие лодки МБР-2 стали бы легкой добычей для истребителей Люфтваффе. Учтя все эти факторы, командующий легкими силами флота распорядился снять аппаратуру телеуправления с катеров Ш-4 и Г-5, и использовать их как обычные торпедные катера.
На Черном Море, где советские адмиралы пребывали в перманентном (и беспредметном) ожидании прорыва итальянского флота через проливы, судьба радиоуправляемых катеров сложилась по-другому. Потеря лидера “Москва” 26 июня 1941 года при обстреле румынского порта Констанца привела к идее использовать для набеговых операций радиоуправляемые катера – начиненные несколькими тоннами взрывчатки, они могли быть направлены в гавань, и подорваны со значительным эффектом. Был разработан план атаки Констанцы парами катеров-торпед Г-5, каждый из которых снаряжался бы 2,5 тоннами взрывчатки. Основными целями для катеров должны были стать боевые корабли, вспомогательные суда и плавучие доки румынского флота: вспомогательными назначались причальные сооружения и нефтяные терминалы порта. Была проведена тщательная разведка и теоретическая подготовка, на основании которой оптимальным временем для атаки признали раннее утро, и рекомендовали синхронизировать ее с отвлекающим авианалетом.

Торпедные катера в атаке
Однако, атаке не суждено было состояться. Ухудшающееся положение на фронтах, потеря Бессарабии, а затем – Крыма, привели к тому, что советский флот лишился передовых баз и был вынужден оперировать из Новороссийска. Румынское побережье с его соблазнительными целями оказалось вне радиуса досягаемости телеуправляемых Г-5; кроме того, контроль немцев над Крымом сделал воздушное пространство Черного Моря слишком опасным для самолетов управления МБР-2. Несмотря на прямой приказ адмирала Кузнецова № 093 от 21 января 1942 года, пункт 8 которого предписывал “Наряду с использованием катеров ручного управления практиковать использование катеров волнового управления, особенно в операциях против баз противника, действия катеров ручного управления, особенно при этом учитывая необходимость прикрытия истребительной авиацией как водимых катеров, так и самолетов-водителей”, условия для таких действий не представлялись еще более года.
Только в феврале 1943 года, наконец, командование ЧФ решилось пустить в бой катера-торпеды. Целью для операции выбрали немецкую базу боевых катеров и транспортных судов в Камыш-Буруне: на нее в частности базировались быстроходные десантные баржи типа “Зибель”. Доставленные на Черное Море по железной дороге, эти неказистые катамараны стали неожиданно опасными противниками для советского флота. Их вооружение из 75-мм орудий и 88-мм орудий позволяло им уверенно выходить победителями из столкновений советскими сторожевыми и торпедными катерами (из-за очень малой осадки “Зибелей”, торпеды просто проскакивали у них под пузом), а мощное зенитное вооружение и хорошая маневренность делали “Зибели” крайне опасными целями и для авиации. И командование ЧФ попыталось решить проблему кардинально, взорвав назойливые баржи вместе с их базой.
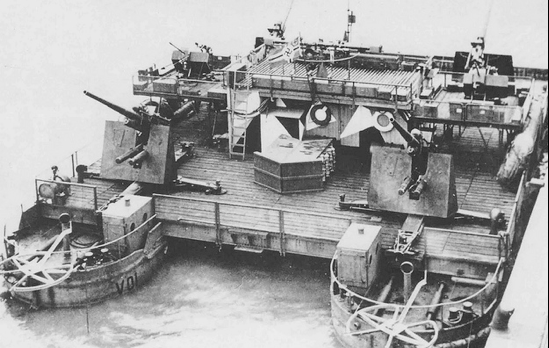
Десантная баржа «Зибель» — неказистый, но на удивление опасный противник
Для операции выделили радиоуправляемый катер ТКА №61, типа Г-5. Катер при этом переоборудовали: сняли торпедные аппараты, вместо них установили заряды взрывчатки общим весом в 2,5 тонны. К аппаратуре дистанционного управления подключили также бортовые огни и прожектор, чтобы ввести немцев в заблуждение относительно принадлежности катера.
Вечером 22 февраля, ТКА №61 вышел из Гелленджика. Его сопровождали два других торпедных катера, которые должны были ввиду цели снять с ТКА №61 экипаж. Но операция сорвалась, причем не по вине робота: самолет управления МБР-2 в воздухе потерпел аварию и разбился у аэродрома Гелленджика. Весь его экипаж погиб.
В июле 1943 года, подготовили вторую операцию. На этот раз ее целью должна была стать Анапа, порт которой использовался немцами как база снабжения. В ночь с 21 на 22 июля, все тот же ТКА №61 вышел из бухты Гелленджика в сопровождении двух других торпедных катеров, которые эскортировали катер-торпеду в район цели. Около полуночи, в воздух поднялся и самолет управления МБР-2, а с ним – еще шесть летающих лодок, которые должны были нанести отвлекающий удар.
Примерно в час ночи, экипаж ТКА №61 проверил аппаратуру радиоуправления, взвел взрыватели, и установил механизм самоуничтожения на 90 минут (чтобы в случае неудачи, секретный катер не достался немцам), после чего покинул борт, перейдя на катера сопровождения. Управление перешло к капитан-лейтенанту Саблину на самолете управления, который и направил катер-торпеду к Анапе.
Немцы заметили катер в 01:49, их береговая артиллерия открыла по нему огонь. В ответ, по команде с самолета управления, катер-робот зажег сигнальный прожектор, и начал им мигать, то включая, то выключая, довольно успешно имитируя тем самым неразборчивое световое сообщение. Уловка сработала: немцы решили, что к базе приближается их собственный катер, по всей видимости, атакуемый советскими самолетами, и прекратили огонь. Не встречая сопротивления, ТКА №61 на полном ходу устремился к цели… но всего в 300 метрах от мола, внезапно натолкнулся на какое-то подводное препятствие (возможно, остов потопленного корабля), потерял ход и с оглушительным грохотом взорвался. Немцев такой исход изрядно обескуражил, но прямого вреда, к сожалению, не нанес. Для капитан-лейтенанта Саблина это была последняя беспилотная атака – 10 сентября он погиб в бою под Новороссийском.
Последнюю попытку использовать катер-торпеду предприняли в конце 1943. Целью вновь стала немецкая база в Камыш-Буруне, а точнее – изрядно доставшие моряков быстроходные десантные баржи, которые, переоборудованные в канонерки, создавали серьёзные помехи снабжению Керченско-Эльтигенского десанта.
Для операции выбрали катер №41, тип Г-5. 23 ноября он прибыл в Гелленджик и изготовлен к операции. Но ее начало неоднократно откладывалось: сменивший Саблина капитан-лейтенант Скорый, хотя и имел довоенный опыт работы с аппаратурой волнового управления, но последние три года с беспилотными катерами не работал, и нуждался в тренировках для восстановления навыков. Тут вмешалась еще и погода. Конец ноября 1943 выдался бурным, и вывести хрупкие реданные катера типа Г-5 в море никак не удавалось. Только 1 декабря удалось провести небольшие учения и отработать движение катера.
Многократно откладываемая операция в итоге состоялась лишь 16 декабря 1943 года. Предварительная аэрофоторазведка, проведенная истребителями P-40 “Киттихок”, показала обилие целей в гавани. Две быстроходные десантные баржи стояли у причальной стенки, еще одна – в доке судоремонтного завода.
Атаку решили проводить днем, чтобы обеспечить оператору оптимальную видимость фарватера немецкой базы. Критическое ослабление Люфтваффе в 1943 году сделало дневные операции безопасными. В 10.00, летающая лодка МБР-2 поднялась в воздух, сопровождаемая восемью истребителями Як-9. Вскоре после этого вышли в море и катера – катер-торпеда №41, и катера сопровождения ТКА №62 и ТКА №81. С воздуха их прикрывал внушительный эскорт из пяти истребителей Як-9 и восьми ЛаГГ-3. Нанесение отвлекающего удара и подавление огневых точек брали на себя шесть штурмовиков Ил-2 в сопровождении еще восьми истребителей Як-9. Наконец, еще пять истребителей Як-9 в варианте фоторазведчиков были подняты для наблюдения и аэрофотосъемки результатов удара.
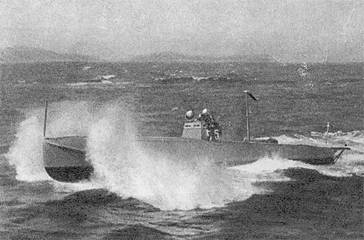
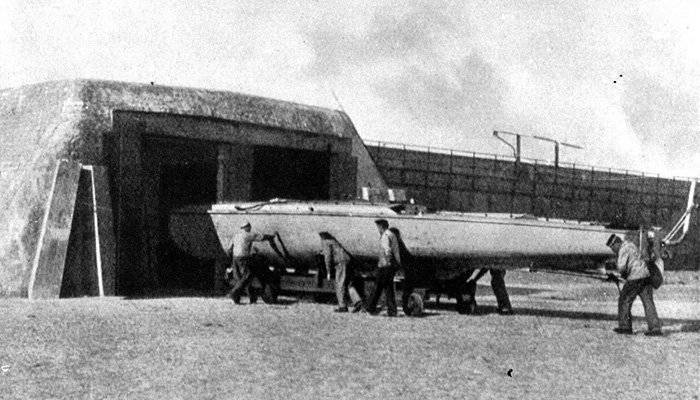
Уникальный кадр — торпедный катер волнового управления на ходу
В 11.04, ввиду неприятельской базы, экипаж ТКА №41 переключил аппаратуру на радиоуправление, установил взрыватели, и перешел на борт катера сопровождения. Под управлением капитан-лейтенанта Скорого, катер-торпеда развил полный ход и устремился к цели. В 11.28 немцы заметили катер, и береговая артиллерия открыла по нему интенсивный огонь. В действие вмешались штурмовики, нанеся ракетно-бомбовые удары по батареям и заставив их временно замолчать (один Ил-2 при этом был сбит зенитками). На полном ходу ТКА №41 двигался к цели…
Что именно произошло дальше, выяснить так и не удалось. По одним данным, катер внезапно сбился с курса (возможно, поврежденный близким разрывом) и врезался в оконечность Камыш-Бурунской косы. По другим данным, пилот самолета управления неправильно понял жест оператора, и заложил разворот не в ту сторону – из-за чего оператор внезапно потерял катер из виду. Известно только одно: в критический момент, катер вильнул не в ту сторону, вылетел на берег и взорвался.
Эта операция стала последним случаем применения радиоуправляемых катеров советским флотом. Хотя части “волнового управления” на Тихоокеанском Флоте сохранялись до 1946 года, никакого участия в боевых действиях они не принимали, а вскоре после войны были расформированы “за устареванием матчасти”. Однако, усилия Шорина (к сожалению, не пережившего блокады Ленинграда) не пропали бесследно: после войны, опыт “катеров волнового управления” был с большим успехом применен при создании радиоуправляемых катеров-мишеней для артиллерийских и ракетных стрельб.
ИСТОЧНИКИ
- «Большой блеф» Тухачевского. Как перевооружалась Красная армия — А. Б. Широкорад (2014).
- Век в строю ВМФ: Авиация Военно-Морского Флота России (1910-2010) — П.В. Левшов, Д.Е. Болтенков (2012).
- Катера пересекают океан — Б.В. Никитин (1980)
- Морской «АМБАРЧИК» — А. Котлобовский, «Авиация и время» (2004, выпуск 1.)
- РАДИОУПРАВЛЯЕМЫЕ КОРАБЛИ И КАТЕРА ВМФ — Е. Енохин, «Морской сборник» (1999, № 4)
- Система базирования Тихоокеанского флота СССР 1932—1941 гг. — Ю.М. Зайцев, «Россия и АТР» (2003)
- Торпедные катера серии Г-5 — Б. Соломонов, К. Кулагин, «Армада» (2001)
источник: https://fonzeppelin.livejournal.com/150247.html



