Содержание:
Вооруженные конфликты последних десятилетий наглядно демонстрируют очевидную истину: современный подход к организации противовоздушной обороны территории перестал соответствовать времени. Рассчитанные в первую очередь на противодействие сложным и высокоэффективным средствам поражения (баллистическим и крылатым ракетам), современные ПВО демонстрируют недостаточную эффективность против сравнительно дешевых и простых дронов, «массово просачивающихся» в воздушное пространство страны. Эффективность же дронов непрерывно возрастает, в первую очередь с развитием машинного интеллекта.
Хотя имеются и случаи сравнительно успешной обороны территории от дронов («великая охота на индюшек над Иорданией» в 2024 году), они относятся к специфической ситуации — чрезвычайно компактной защищаемой территории, чрезвычайно плотной системы ПВО, и большого открытого «предполья», допускающего быстрое и эффективное обнаружение летящих дронов и долгую, последовательную охоту авиации на них. Естественно, что такие условия далеко не всегда можно выполнить.
В данной статье я решил изложить свои взгляды на возможные пути решения проблемы обороны обширной территории от атак дешевых дронов. Сразу предупреждаю, это не «волшебное средство», это скорее комбинация умеренно дорогостоящих организационных и технологических мер, которая при реализации в среднесрочной перспективе может дать необходимый результат.
Я условно разделил систему на три компоненты — «растяжка» (обнаружение и предупреждение), «гончая» (сопровождение и целеуказание) и «охотник» (перехват и уничтожение).
ПЕРВАЯ КОМПОНЕНТА — «РАСТЯЖКА»
Первичной (и зачастую самой сложной) проблемой является обнаружить вход дрона в воздушное пространство страны. Ударные беспилотники вроде классического «Шахеда» относительно невелики, имеют небольшую ЭПР и летят довольно низко — что делает их сложными целями для обнаружения радарами.
Идеальным решением, конечно, было бы выставить вдоль защищаемой территории сплошной «забор» из радаров, разнесенных на такие промежутки, чтобы гарантировать обнаружение дронов. Однако, как и любое «идеальное» решение, такое решение едва ли практично — как по экономическим соображениям (радарные станции стоят дорого), так и по соображениям уязвимости самих радарных станций (которые легко запеленговать по их собственному излучению).
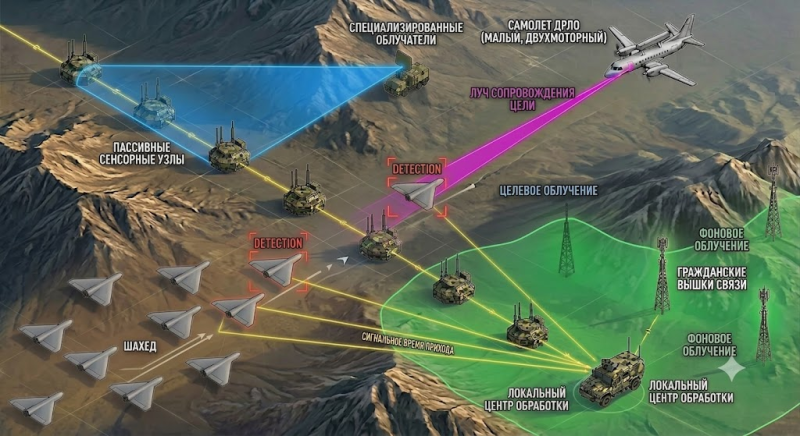
Поэтому вместо идеального, используем оптимальное решение — цепочку полностью пассивных детекторных станций, опирающихся на внешнее облучение.
Разовью мысль. Главной проблемой традиционного моностатического радара (т.е. радара, у которого приемник и передатчик расположены вместе при одной антенне) является то, что его импульсы вынуждены дважды преодолевать расстояние между радаром и целью — сначала импульс от радара к цели, затем «эхо» от цели к радару. При этом импульсы ослабевают пропорционально квадрату расстояния. В случае с небольшим дроном (который сам по себе отражает довольно малую часть излучения), к радару возвращается слишком слабое «эхо», чтобы выделить сигнал дрона на общем фоне.

Но если мы разделим приемник и передатчик — и расположим приемники цепочкой впереди передатчика — то ситуация сразу изменится. Когда дрон пролетает над цепочкой приемников, расстояние от дрона до приемника гораздо меньше чем расстояние от дрона до передатчика. И приемник легко может засечь «эхо» пролетающего в непосредственной близости от него дрона. Такой подход называется мультистатическим радаром; один передатчик-облучатель может сканировать лучом пространство сразу над множеством приемников.
Выстроив вдоль границы защищаемой территории цепочку приемных станций и облучая ее из глубины территории, мы получаем «растяжку» из пассивных детекторов, пересекающие которую дроны непременно «зацепятся» и будут обнаружены. При этом детекторные станции, во-первых, относительно дешевые, а во-вторых — ввиду полностью пассивного принципа работы, их абсолютно невозможно запеленговать. Поиск и уничтожение закамуфлированных детекторных станций для оппонента станет крайне сложной задачей (а если мы еще и на настоящую станцию будем ставить рядом десяток пластиковых макетов…)
Разумеется, чтобы цепочка пассивных детекторов работала, ей необходимо внешнее облучение. И тут возможны следующие варианты:
* В регионах с развитой телекоммуникационной инфраструктурой, в качестве облучателей могут использоваться гражданские средства коммуникации — например, вышки сотовой связи, телевизионные вышки и т.д. Станции, разумеется, придется подстраивать под конкретный фон, но зато мы здорово экономим на дорогих и сложных облучателях;
* В регионах, где развитая телекоммуникационная инфраструктура отсутствует (в малонаселенных областях, либо на сложном рельефе) в качестве облучателей придется располагать специализированные станции — по сути, радары, «просвечивающие» приземный слой воздуха. Более дорогое решение, но зато нам достаточно меньшего количества облучателей чтобы перекрыть большую территорию;
По приблизительным оценкам, при использовании фоновых облучателей, необходимо будет ставить детекторные станции через 15-25 км. В то время как при использовании радаров-облучателей, достаточно будет через 40-50 км. Это означает, что для перекрытия 1000-км участка границы будет достаточно от 67 и до 20 станций. Ключевой аспект — объединение всех станций в единую цифровую сеть, с автоматической обработкой информации посредством самообучающихся моделей и регулярными «тренировками» таковых (как виртуальными, так и с использованием реальных дронов-мишеней разных размеров, типов и схем полета).
ВТОРАЯ КОМПОНЕНТА — «ГОНЧАЯ»
Вторичной задачей после обнаружения вторжения дронов является их отслеживание и сопровождение. Мало просто обнаружить факт появления дрона; надо еще понять, где точно он находится и в какую сторону направляется. И тут оптимальным решением является «летающий радар» — самолет (или дрон) дальнего радиолокационного обнаружения, в режиме патрулирования.

Получая первичное предупреждение от цепочки наземных станций, радар самолета ДРЛО уже знает «где искать». Он знает примерное положение дронов и направления их движения; он может теперь уже не обшаривать тысячи квадратных километров воздуха широким лучом, а направить узкие, игольчатые лучи непосредственно туда, где дроны находятся. И «поймав» дрон лучом, уже не отпускать, точно определяя его положение и направление движения. По приблизительным прикидкам, дальность обнаружения
Мобильность же летающего радара позволяет ему быстро прибыть в район нарушения воздушной границы, и занять оптимальную позицию для отслеживания множества небольших целей. Наземные радары в этом плане сильно ограничены рельефом, а также фоновой засветкой от поверхности. Дроны могут относительно легко спрятаться от сопровождения наземными радарами (особенно если их положение заранее известно); с воздушными радарами это будет гораздо сложнее.
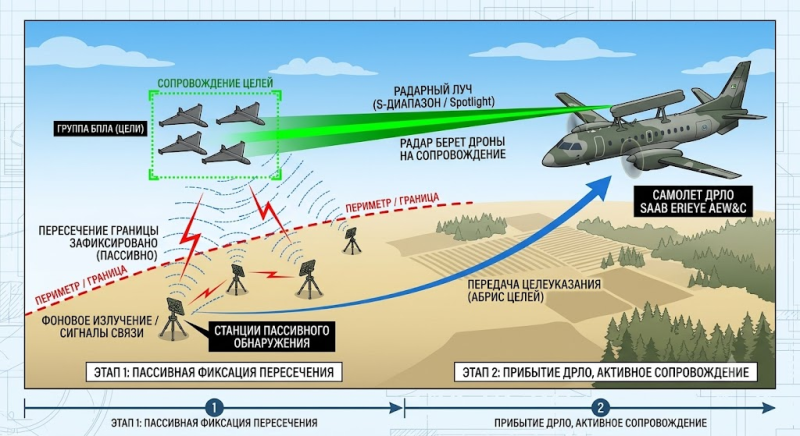
По приблизительным прикидкам, РЛС самолета ДРЛО может сопровождать дрон с дистанции 250-300 км — что существенно лучше, чем дистанция обнаружения дронов для того же радара (около 180-200 км). Это связано с тем, что в режиме сопровождения заранее обнаруженной цели, РЛС использует более сфокусированные, более мощные лучи, и сканирует меньший объем пространства.
С точки зрения реализации, идеальным решением видятся «легкие» самолеты ДРЛО на основе двухмоторных бизнес-джетов. Оснащенные антеннами бокового обзора (над килем, или встроенными в борта, как на израильском EL/W-2085) они существенно дешевле «тяжелых» ДРЛО (вроде А-50 или E-3 Sentry) и могут производиться в больших количествах. Полноценный круговой обзор может быть даже и не нужен — если задачей является отслеживание целей в заранее известном секторе.

EL/W-2085, антенна радара установлена на боковой части фюзеляжа, в носовом и кормовом обтекателе — вспомогательные антенны для обеспечения кругового обзора
Альтернативой полноценным самолетам ДРЛО могут быть крупные патрулирующие беспилотники — вроде «Альтаир» или MQ-9 «Reaper» — оснащенные бортовыми радарными станциями «истребительного класса». Обработка данных в этом случае осуществляется на наземных постах, куда дроны передают информацию со своих радаров. Менее эффективные, чем пилотируемые ДРЛО, они зато могут производиться в значительно больших количествах и развертываться массово, для обеспечения эффективного перекрытия воздушных границ.
Возможным также решением может быть использование патрулирующих беспилотников, оснащенных пассивными приемными станциями, воспринимающих эхо от внешнего облучения (наземных радаров или самолетов ДРЛО). Такое решение позволяет развить концепцию мультистатического радара и для функции сопровождения дронов: множество летающих пеленгационных станций, опирающихся на облучение с самолета ДРЛО, и выстраивающих сеть сопровождения на пути дронов.
ТРЕТЬЯ КОМПОНЕНТА — «ОХОТНИК»
После того, как дроны обнаружены и взяты на сопровождение, их необходимо уничтожить. И тут мы подходим к главной проблеме: сложности экономически эффективного перехвата. «Экономически эффективного» является ключевым элементом проблемы — зенитные ракеты, особенно большой дальности, удовольствие недешевое. Применяя их по дронам мы в буквальном смысле расходуем на оборону больше, чем противник на нападение. Зенитные же ракеты малой дальности (достаточно дешевые, чтобы их применение по дронам было оправдано) просто не могут быть сконцентрированы в достаточных количествах.

Решением проблемы мне видится возрождение концепции барражирующего перехватчика — летательного аппарата, оптимизированного для длительного пребывания в воздухе, обнаружения и самостоятельного сближения с целями, и несущего достаточный запас оружия для нескольких последовательных перехватов. На пике «авиационного» периода Холодной Войны — когда основным средством доставки все более мощного ядерного оружия были все более быстрые бомбардировщики — такого рода самолеты, вроде F-89 «Скорпион» и Як-25, являлись эффективным средством прикрытия обширных территорий от воздушного нападения.
Вполне логично, что такого рода перехватчик должен быть экономически оптимизированным под выполняемую функцию. То есть беспилотным и относительно простым по конструкции. Так как ему предстоит постоянно действовать внутри сенсорного и коммуникационного поля «домашней» территории, то наличие на борту пилота — бессмысленно и даже избыточно. И так как это чистый «перехватчик домашней территории», не рассчитанный иметь дело с активно противодействующим неприятелем, то ему не нужна, например, радарная малозаметность, сколь-нибудь существенная живучесть, способность выдерживать значительные перегрузки и т.д.

Такой дрон должен обладать:
* Высокой дозвуковой скоростью полета — позволяющей нагонять и перехватывать неприятельские ударные дроны (в том числе неоднократно);
* Большой продолжительностью полета — позволяющей осуществлять множество последовательных перехватов за один вылет;
* Возможностью безаэродромного базирования — в идеале, вертикальным взлетом и посадкой, но вполне допустим сценарий также укороченного взлета (с рампы, с мобильной катапульты) и укороченной посадки;
* Бортовой всепогодной системой поиска & целеуказания — позволяющей дрону самостоятельно выполнять поиск и перехват дронов, если внешнее целеуказание по какой-то причине недоступно;
* Легким ударным вооружением, специально адаптированным для перехвата ударных дронов — в количестве, достаточном для выполнения экономически эффективного (т.е. чтобы стоимость перехваченных целей существенно превосходила стоимость вылета) количества перехватов за один вылет;
* Возможностью подвески более тяжелого противовоздушного вооружения (УРВВ малой и средней дальности) ценой отказа от части или всего легкого боекомплекта — чтобы не делать перехватчик слишком специализированным;
* Базовыми средствами самообороны (диполи, детекторы излучения, системы постановки радиопомех, средства инфракрасного противодействия, буксируемые ложные цели, «умная фольга» и т.д.) — на случай, если перехватываемые дроны будут нести УРВВ для самообороны;
* Возможностью быстрого послеполетного обслуживания и перезарядки в полевых условиях;
Основным вооружением такого дрона представляются стандартные авиационные ракеты (например, С-8), оснащенные блоком лазерного наведения — либо полуактивного (т.е. на «зайчик» лазерного луча, отраженный от цели), либо «по лучу» (т.е. ракета удерживает себя вдоль узкой зоны пространства, непрерывно сканируемой лучом лазера) — и неконтактным взрывателем.

В настоящее время это оружие выглядит наиболее экономически эффективным средством борьбы с ударными беспилотниками большой дальности — оно дешевое и компактное, производится на основе массово выпускаемых боеприпасов. И может подвешиваться на дрон-перехватчик в достаточных количествах, чтобы позволить ему за один вылет осуществить множество перехватов.
Существующая концепция применения подобного рода корректируемых ракет из стандартных подвесных контейнеров, впрочем, выглядит недостаточно практичной. Это приемлемо для располагающего избытком тяги пилотируемого истребителя, но малоэффективно для дрона-перехватчика. Вполне возможным является возвращение к «нестандартным» концепциям размещения вооружения, применявшимся на перехватчиках 1950-ых: выдвижные пусковые установки на большое число ракет (как на F-86 «Sabre Dog»), пусковые трубы, встроенные в фюзеляж или в створки отсека вооружения (как на F-102 «Delta Dagger»), револьверные пусковые установки высокой емкости и т.д.
По сути дела, такой дрон-перехватчик — это батарея ЗРК малой дальности, способная активно гоняться за целями.

Основная идея таких дронов — они располагаются батареями (желательно мобильными) позади «растяжки» пеленгационных станций, и осуществляют взлет по данным средств ДРЛО. Каждая батарея контролирует определенный сектор воздушного пространства, осуществляя преследование и перехваты неприятельских дронов в нем. При необходимости (например, в случае потери внешнего целеуказания) батарея также должна иметь возможность организовать секторальный контроль и самостоятельный просчет перехватов — почему важно, чтобы дроны имели собственные возможности поиска целей.
Разумеется, дроны-перехватчики не смогут остановить полностью действительно массированные налеты. Но, в конце концов, никто не отменял и классические пилотируемые перехватчики — сверхзвуковые самолеты, способные быстро сосредоточиться в секторе прорыва, и сбивать неприятельские дроны, пускай даже и не экономически эффективно. Основная идея дронов-перехватчиков в данной концепции это максимально истощить прорывающийся «дрон-стрим» или рассеянный рой, экономически эффективно выбив максимально возможное количество прорывающихся ударных дронов. А остальное уже может быть передоверено традиционной ПВО.
В конце концов, не надо забывать главное правило обороны — даже если стоимость перехвата неприятельского боеприпаса высока, она всяко будет ниже стоимости того ущерба, который этот боеприпас может причинить, если прорвется.
источник: https://fonzeppelin.livejournal.com/427614.html