

Содержание:
В этой статье я хочу рассказать об одном чрезвычайно интересном образце военной электроники Второй Мировой Войны — американском авиационном радаре AN/APS-6. Этот небольшой мультирежимный радар был специально разработан для вооружения флотских одноместных истребителей — чтобы те могли использоваться как ночные перехватчики. Возможности AN/APS-6 позволяли найти воздушную цель при нулевой видимости, сблизиться с ней и атаковать «вслепую», без визуального контакта.
Идея поставить радар на истребитель появилась еще до Второй Мировой Войны. И первым тут были англичане. Создав во второй половине 1930-ых первую в мире интегрированную систему ПВО территории страны — основанную на сети радаров «Chain Home» и централизованной системе отслеживания целей и наведения перехватчиков (система Даудинга) — британцы, вполне благоразумно, начали размышлять над тем, что же предпримет неприятель, столкнувшись с такой обороной.

Герой данного материала на крыле истребителя F4U
Ответ был достаточно очевиден. Потерпев неудачу в дневных налетах на Британию, неприятель переключится на ночные рейды — рассчитывая что темнота скроет его бомбардировщики от британских перехватчиков. Радары 30-ых могли определять положение объектов лишь с точностью до нескольких километров: достаточно, чтобы осуществить перехват днем, но не в ночной мгле.
Пытаясь решить проблему, британцы рассмотрели множество предложений — например, таких, как разместить вдоль побережья цепочку наводимых радарами прожекторов, которые «подсвечивали» бы неприятельские самолеты для патрулирующих истребителей. Но все же лучшим решением было бы поставить небольшой радар на сам истребитель. Идея на тот момент совершенно не очевидная (радары того времени были громоздкими и массивными сооружениями), но проведенные в 1936 году эксперименты с приемной антенной, установленной на старом бомбардировщике «Handley Page Heyford», и принимавшей отраженные от самолета-цели сигналы наземного радара, подтвердили ее принципиальную работоспособность.

Антенна радара AI Mk.IV на носу британского тяжелого истребителя
На то, чтобы упихать полноценный радар в самолет ушло немало времени. Только в 1940 году, первый в мире серийный авиационный радар — «Airborne Interception» Mk.IV — поступил на вооружение. Оснащенные этими радарами тяжелые истребители сыграли важную роль в прекращении немецких ночных рейдов в 1940-1941 году. К этому уже и сами немцы занялись авиационными радарами, пытаясь (безуспешно) остановить с их помощью уже британские ночные бомбардировки.
Первые авиационные радары были довольно-таки неуклюжими системами. Они работали в метровом диапазоне, что накладывало жесткие ограничения на их разрешение по дальности и по азимуту. Сканирование осуществлялось методом «переключения лепестков»: механическое устройство непрерывно переключалось между несколькими приемными антеннами, сигналы с которых затем сравнивались по интенсивности. Если цель находилась в равносигнальной зоне (прямо по курсу самолета), то сигналы со всех антенн были приблизительно одинаковы. Если цель смещалась в каком-либо направлении, то сигнал с одной антенны усиливался, а с другой ослабевал.
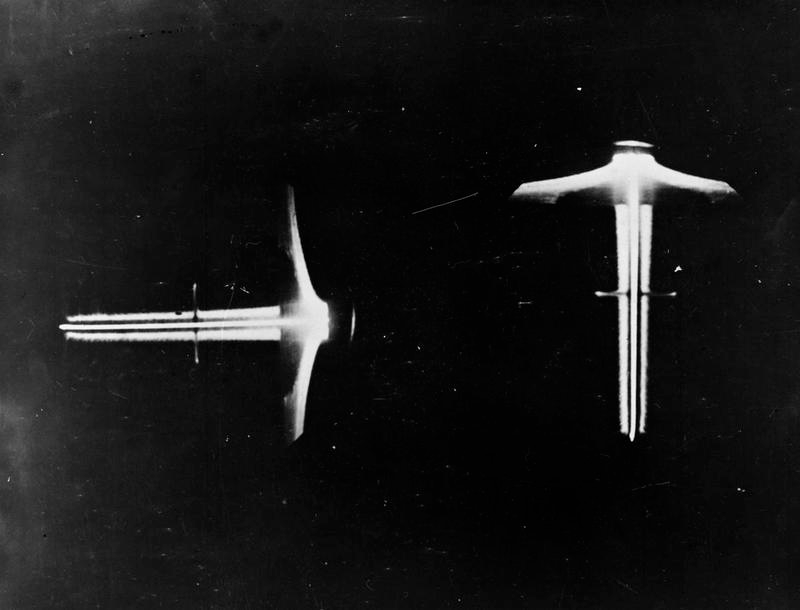
Экран осциллоскопа британского радара AI Mk.IV. Левая трубка выводит информацию о высоте цели относительно самолета (выше/ниже). Правая трубка выводит информацию об азимуте на цель относительно самолета (правее/левее). Задачей пилота является вести самолет так, чтобы пики на трубках были симметричны — это будет означать, что цель в равносигнальной зоне прямо по курсу
Для визуализации информации, эти ранние радары использовали осциллоскопы — катодно-лучевые трубки с электронным отклонением луча. Цель выводилась в виде пика на полоске луча. С помощью шкалы на экране осциллоскопа оператор определял дистанцию до цели. Направление на цель же определяли, последовательно посылая на трубку сигналы с пары антенн, что приводило к образованию двух пиков в противоположных направлениях. По их относительному размеру, оператор определял, в какую сторону смещена цель относительно равносигнальной зоны — если цель была в ней, то оба пика были одинаковой высоты. Часто для вывода всей необходимой информации приходилось использовать несколько осциллоскопов:
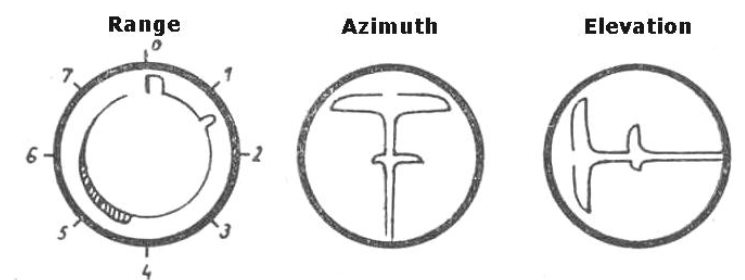
Три осциллоскопа немецкого радара «Лихтенштейн». Левый выводил дистанцию до цели: электронный луч выписывал круги по циферблату, и выдавал пик, положение которого соответствовало расстоянию до цели. Центральный выводил азимут на цель: пилот должен был вести самолет так, чтобы правый и левый пики были одинакового размера. Правый выводил положение цели по высоте относительно самолета (выше или ниже)
Появление в 1941-1942 сантиметровых радаров, основанных на полостном магнетроне, позволило англичанам (и работавшим с ними американцам) значительно улучшить возможности авиационных радаров. Новые РЛС отличались меньшими габаритами, но большей дальностью и значительно лучшим разрешением. Переход к приемо-передающей параболической антенне позволил отказаться от не слишком точного сканирования «переключением лепестков», и перейти к существенно более точному сканированию вращающейся антенной (коническому, либо спиральному).
АВИАЦИОННЫЕ РАДАРЫ АМЕРИКАНСКОГО ФЛОТА
Американские вооруженные силы (в особенности флот) тоже живо интересовались авиационными радарами. Но в первую очередь в контексте поисковых — для обнаружения с воздуха неприятельских кораблей и подводных лодок. Проблема ночного перехвата вражеских бомбардировщиков перед американцами поначалу особо не стояла, а вот немецкие субмарины и японские боевые корабли были вполне себе первостепенной угрозой.
В 1941-1942, американцы (сначала с британской помощью, затем самостоятельно) создали семейство весьма удачных поисковых радаров AN/APS (англ. «Army-Navy/Aircraft Radar, Search», «Армейский и Флотский/Авиационный Радар, Поисковый»). Венцом работы в этом направлении стал в 1943 году AN/APS-4. Этот микроволновый радар с подвижной параболической антенной был одним из первых авиационных радаров «универсального назначения». Он монтировался единым блоком в обтекаемом подвесном контейнере и мог устанавливаться на самые разные самолеты — патрульные и палубные бомбардировщики, транспорты, тяжелые истребители.

Подвеска с AN/APS-4 под крылом палубного пикировщика
Хотя AN/APS-4 создавался изначально для поиска надводных целей, ночной навигации и «слепого» бомбометания — но оказалось, что его хорошее разрешение и большая дальность действия позволяют использовать радар и для перехвата воздушных целей. Конструкция радара позволяла точно определять азимут и дистанцию до цели, и приблизительно — высоту цели относительно самолета. Используя AN/APS-4, истребитель мог сблизиться с противником в полной темноте на дистанцию визуального обнаружения и атаковать цель. Такая возможность пришлась весьма кстати как в Европе, так и над Тихим Океаном: по мере того, как авиация союзников все увереннее завоевывала господство в небе, немцы и японцы все меньше летали днем, и все больше — ночью.
Тем не менее, американский флот был не в полной мере доволен этим радаром. С точки зрения адмиралов, у AN/APS-4 был один важный недостаток: он требовал оператора, то есть не подходил для установки на одноместные истребители. А палубные истребители флота были именно что одноместными. Частично проблему ночного перехвата удавалось решить, используя оснащенные AN/APS-4 тяжелые истребители P-38 «Лайтинг» (наземного базирования) и палубные торпедоносцы «Авенджер» (достаточно маневренные и скоростные для этой роли), но в целом это было лишь импровизированное решение.

Ночной истребитель P-38M «Найт Лайтинг» с радаром AN/APS-4 на носу и кабиной радиооператора позади пилота
В январе 1943 года, корпорация «Вестингауз» получила заказ от флота на разработку нового подвесного радара — упрощенной, но в то же время улучшенной версии AN/APS-4 для одноместных истребителей. Новый радар ориентировался в первую очередь на воздушный перехват, и должен был позволять пилоту найти, перехватить и атаковать цель полностью вслепую, при отсутствии какой-либо видимости.
Фирма приняла предложение, и приступила к работе немедленно. Уже в марте 1943, радиоподразделение «Вестингауз» представило флоту стендовый прототип нового радара. Устройство произвело сильное впечатление на адмиралов, которые немедленно предложили фирме принять на себя разработку и производство не только радиолокатора, но и всего комплекта оборудования. Многочисленные пересмотры требований (как по инициативе флота, так и по инициативе самой фирмы), впрочем, привели к затягиванию сроков. Чтобы избежать срыва поставок, планировавшихся на весну 1944, адмиралы предложили компромиссный подход: «Вестингауз» выпускал установочную серию радаров с использованием уже готовых антенных компонентов, производимых компанией «Philco». Эта серия получила обозначение AN/APS-6A и поступила на вооружение в марте 1944 года — в то время как «основной» AN/APS-6 был готов только в сентябре 1944.
КОНСТРУКЦИЯ
Радар воздушного перехвата AN/APS-6 представлял собой компактную подвесную систему, предназначенную для установки на не-специализированные истребители. Основная часть конструкции радара размещалась в герметичном стеклопластиковом обтекателе, закреплявшимся под крылом истребителя — у передней кромки, обычно ближе к законцовке крыла.

AN/APS-6 на правом крыле истребителя F6F
Внутри обтекателя размещались антенный комплекс, передатчик-преобразователь, и распределительная коробка. Проходивший внутри крыла кабель соединял обтекатель с блоком питания, модулятором сигнала (для передатчика) и приемником-усилителем (для антенны), расположенными в хвосте самолета за спинкой сиденья пилота. В кабине пилота размещались две контрольные панели — основная и вспомогательная — и экран с катодно-лучевой трубкой, служивший для визуализации информации радара.
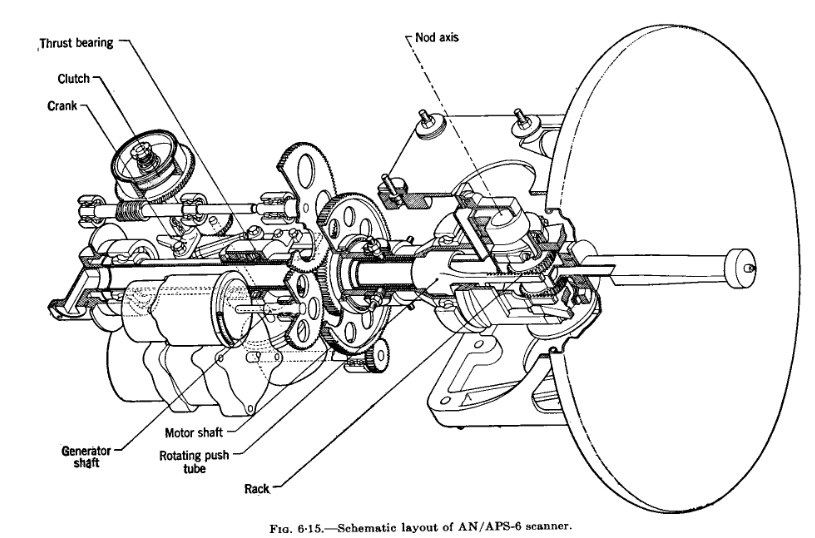
Магнетрон радара генерировал импульсы на длине волны 3 см с частотой 500, 1000 и 2000 циклов в секунду. Параболическая антенна радара формировала узкий луч шириной порядка 5 градусов. Пассивный отражатель вращался со скоростью 1200 оборотов в минуту (20 оборотов в секунду). Специальный механизм отклонял антенну от продольной оси на угол в 60 градусов и обратно — тем самым заставляя луч радара двигаться по спирали, сканируя конус в 120 градусов перед самолетом.
В отличие от предыдущих моделей (предназначавшихся в основном для работы на малой высоте), обтекатель AN/APS-6 находился под избыточным давлением и поддерживал постоянную внутреннюю температуру. Это обеспечивало работоспособность ламп на высотах более 9000 метров (30000 футов) и при температуре воздуха от -30 до +50 градусов Цельсия.
Визуализацию данных для пилота осуществлял установленный в кабине экран с катодно-лучевой трубкой (осциллоскоп). Движение электронного луча по экрану синхронизировалось с движением антенны радара. Экран имел желтую фосфоресцирующую поверхность, сигнатуры на которой обозначались белыми точками или полосками. Для лучшей видимости экрана, в комплекте с радаром поставлялся специальный визор-светофильтр для шлема пилота.
Управление радаром было предельно простым, и осуществлялось с помощью двух контрольных пультов — основного и вспомогательного — установленных в кабине пилота.

Основной пульт располагался слева от кресла пилота. В центре его был установлен основной переключатель — дальности отображения на экране, а равно и режимов работы радара. Меняя дальность отображения, пилот автоматически переключал радар из одного режима в другой.
Два переключателя слева предназначались для включения и выключения радара (на переход от «Standy» к «Operate» требовалось около трех минут — для прогрева электронных ламп) и переключения между режимами активного радара («Radar») и полуактивного отслеживания радиомаяков («Beacon»). Первый режим использовался для поиска и перехвата целей, второй для навигации по наземным или корабельным радиомаякам.
Также имелись две ручки настройки справа — одна для управления чувствительностью приемника, другая для переключения между автоматической и ручной настройкой передатчика.
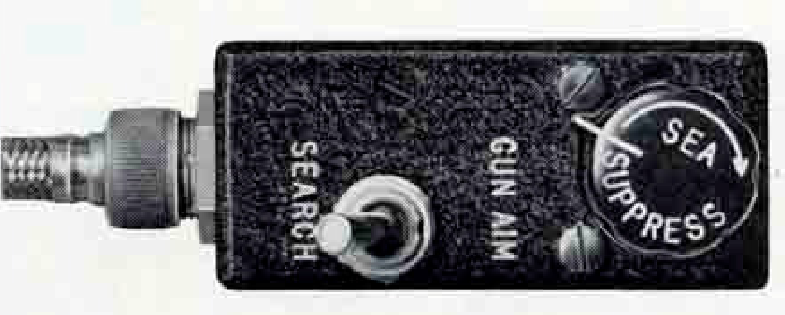
Вспомогательный пульт размещался на рукояти дросселя — так, чтобы пилоту не нужно было убирать руку с рычага. Он включал всего два элемента: переключатель между «поиском» («Search») и «прицеливанием» («Gun aim»), и вращающуюся ручку режима «подавления моря» («Sea suppress»). Первый использовался для переключения радара между режимом поиска цели и режимом радиолокационного прицела. Вторая предназначалась для фильтрации помех, возникающих при переотражении луча от поверхности моря.

Наконец, на лицевой стороне блока катодно-лучевой трубки, использовавшейся для визуализации данных радара, имелись еще две вращающиеся рукоятки. Левая («Signal level») использовалась в том случае, если излишне яркие сигнатуры больших, хорошо различимых целей, мешали разглядеть меньшие. Правая («Wing calib.») использовалась во время тренировочных полетов для точной калибровки радара как радиолокационного прицела: пилот пристраивался в хвост дружественному самолету, выверяя дистанцию с помощью оптического прицела, и калибровал радар на дальность в 250 ярдов. Которая соответствовала оптимальной дистанции открытия огня бортового вооружения.
РЕЖИМЫ РАБОТЫ
Предназначенный в первую очередь для воздушного перехвата в условиях плохой или отсутствующей видимости, AN/APS-6 штатно имел три основных рабочих режима — поиск, перехват и прицеливание. Также имелся дополнительный режим навигации с помощью радиомаяков. Переключение между режимами осуществлялось посредством переключения дальности отображения на экране с помощью ручки настройки. Имелось пять возможных настроек дальности: 65 и 25 морских миль (режим поиска), 5 и 1 морская миля (режим перехвата) и 1000 ярдов (режим прицеливания).
РЕЖИМ ПОИСКА
РЕЖИМ ПОИСКА использовался для обнаружения воздушных и надводных целей, и отслеживания обстановки на большой дальности от самолета. Этот режим включался, когда были выставлены настройки дальности 65 или 25 морских миль.
Максимальная дальность обзора составляла 120 км (65 морских миль), но реально на такой дистанции радар мог различить только элементы рельефа и большие наземные объекты, вроде городов. Крупный надводный корабль — авианосец или линкор — мог быть замечен с дистанции порядка 92,5 км (50 морских миль). Дальность же обнаружения неприятельских самолетов, как правило, не превышала 10 км (5 морских миль)
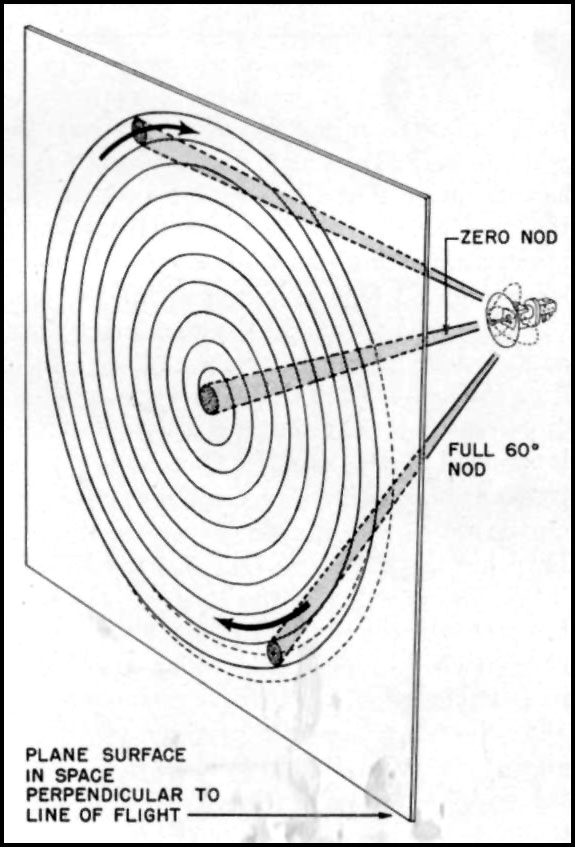
Спиральное движение луча радара в режиме поиска — от -60 до +60 градусов относительно продольной оси
В режиме поиска, вращающаяся антенна радара раскачивалась по спиральной траектории — снаружи-внутрь, затем изнутри-наружу. Такой паттерн движения позволял быстро просканировать узким лучом широкий сектор перед самолетом. Максимальный угол отклонения антенны от продольной оси составлял 60 градусов, то есть поле сканирования антенны было равно 120 градусам перед самолетом.
На экране, данные радара визуализировались в режиме «вид сверху», т.н. B-scope. Пилоту демонстрировалась проекция поля зрения радара на плоскость. Корабли и самолеты отображались яркими точками, географические объекты — такие, как острова и горы — как силуэты. Полный цикл сканирования (и, стало быть, обновления экрана) занимал около 2 секунд, что делало этот режим непригодным для сближения с быстро двигающейся воздушной целью.
Слева: морской конвой и остров в режиме 65-мильного обзора. Справа: тот же конвой и тот же остров в режиме 25-мильного обзора
Экран в режиме поиска имел два режима отображения — 65 миль (120 км) и 25 миль (46 км). Переключаясь между ними, пилот мог менять масштаб изображения. В режиме поиска, пилот мог достаточно точно определять азимут на обнаруженные цели, но дистанцию можно было определить лишь очень приблизительно, по относительному удалению отметки цели от нижней границы экрана («нуля»), поскольку радар выдавал только угловую дистанцию до целей. Высота целей в режиме поиска никак не отображалась.
РЕЖИМ ПЕРЕХВАТА
РЕЖИМ ПЕРЕХВАТА использовался для выбора конкретной воздушной цели и сближения с ней. Этот режим включался при переключении настроек дальности на 5 или 1 морскую милю.
В этом режиме, антенна радара переставала раскачиваться, и вращалась вокруг продольной оси под углом примерно в 3-3.5 градуса, осуществляя тем самым коническое сканирование в пределах узкого угла в 15 градусов:
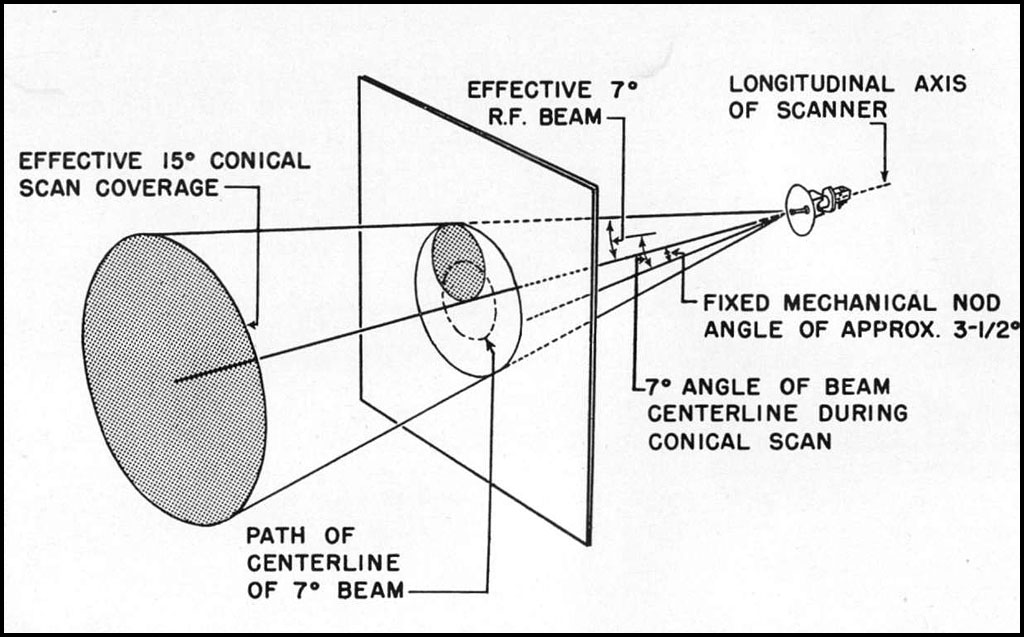
Поле зрения радара, таким образом, сужалось, но частота обновления информации значительно повышалось — что оптимально подходило для отслеживания конкретной цели. Важно уточнить, что AN/APS-6 не имел функции «захвата» и автоматического сопровождения цели. Отслеживание и удержание цели в поле зрения луча было целиком задачей пилота.
Визуализация в режиме перехвата была более комплексной. Изображение по-прежнему давалось в проекции «вид сверху», но поле зрения теперь было более узким, а частота обновления экрана более высокой (O-scope). Цели в режиме перехвата визуализировались в виде пары близко расположенных точек: левая была настоящим «эхом» от цели, а правая «тенью» этого эха. Система двух точек использовалась чтобы дать пилоту представление о положении цели по высоте.
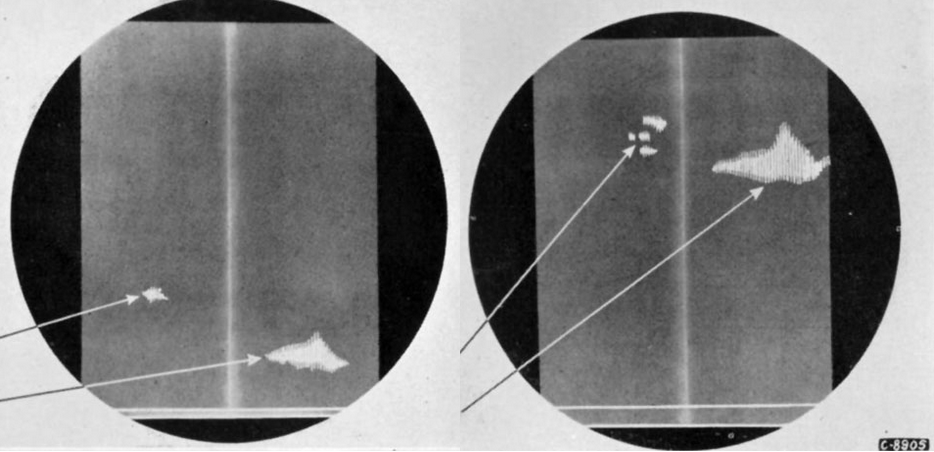
Цель на экране O-scope, в режиме 5-мильного отображения. Слева — цель левее и ниже самолета, дистанция около 3,5 миль. В центре — цель прямо перед самолетом, дистанция около 3 миль. Справа — цель перед самолетом, дистанция около 1000 ярдов
Если обе точки находились на одном горизонтальном уровне, это значило, что самолет и цель находятся приблизительно на одной высоте. Если правая точка («тень») располагалась выше левой («эхо»), то это означало, что цель выше самолета, а если наоборот — то ниже. Такой метод отображения данных был, конечно, очень приблизительным, но зато достаточно простым и удобным для пилота.
Обычно на экране также присутствовали определенные артефакты визуализации, связанные с задеванием вращающимся лучом радара поверхности моря. Яркая горизонтальная линия поперек экрана называлась «линией высоты» («altitude line») и представляла собой результат отражения сигнала радара от поверхности моря прямо под самолетом. Пилот мог использовать эту линию как альтиметр, для определения высоты полета.
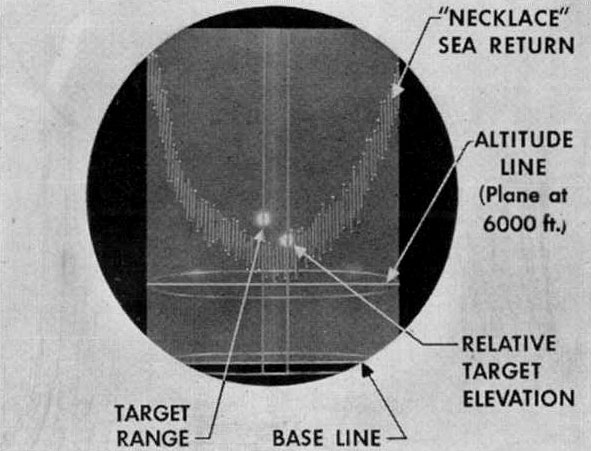
Протянувшаяся по экрану прозрачная, мерцающая дуга называлась «морским ожерельем» («Sea necklace») и представляла собой эхо от касания лучом радара поверхности моря впереди самолета. Обычно оно не доставляло проблем, но в случае перехвата на малой высоте, отражение вращающегося луча от поверхности воды могло стать настолько ярким, что мешал рассмотреть сигнал цели. В этом случае пилот мог включить режим «подавления моря» (англ. «Sea Suppression»), при котором радар просто игнорировал сигналы, поступавшие при нижнем положении антенны.
РЕЖИМ ПРИЦЕЛА
РЕЖИМ ПРИЦЕЛА использовался для «слепой» атаки на невидимую цель. Для переключения на этот режим, пилоту нужно было перебросить переключатель на вспомогательном пульте в режим «прицеливания».
В этом режиме, радар выступал в роли радиолокационного прицела для бортового вооружения самолета. Антенна продолжала работать в режиме конического сканирования (как и при перехвате), но отображение цели на экране менялось полностью:
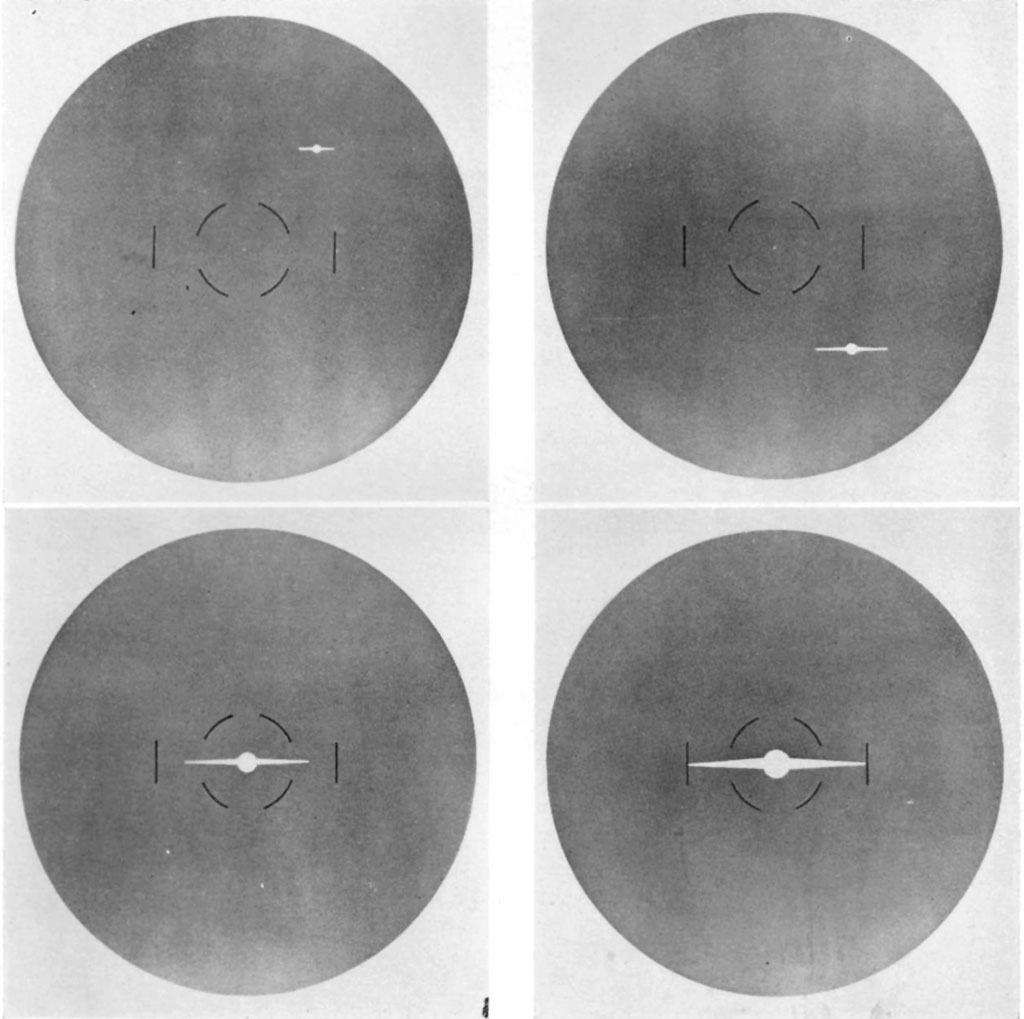
Цель на экране G-scope. Верхний-левый — цель примерно в 800 ярдах справа-сверху. Верхний-правый — цель примерно в 600 ярдах справа-сбоку. Нижний-левый — цель в 320 ярдах прямо по курсу. Нижний правый — цель на дистанции открытия огня
В режиме прицеливания, экран радара переключался на вид «от первого лица», т.н. G-scope. Яркая светящаяся точка обозначала неприятельский самолет впереди. Задачей пилота было вести самолет так, чтобы точка оставалась в пределах начерченной в центре стекла рамки прицела — то есть на линии стрельбы бортового оружия.
По мере приближения к цели, точка растягивалась по горизонтали, отращивая по бокам характерные «крылья», служившие индикатором дистанции. Чем ближе находилась цель, тем сильнее растягивалась ее отметка. Когда «крылья» полностью заполняли рамку прицела, это означало, что цель приблизилась на дистанцию эффективной стрельбы из бортового вооружения. Все, что оставалось пилоту, это нажать на гашетку, и располосовать захваченного врасплох немца/японца очередями шести тяжелых пулеметов.
Если самолет проскакивал мимо цели, или цель резким маневром уходила из луча радара, то отметка мгновенно сжималась в точку и замирала неподвижно в центре экрана. Это служило сигналом для пилота, перевести радар обратно в поисковый режим, вновь отыскать цель и повторить заход. Инструкции, впрочем, резонно указывали что в ночном бою наиболее эффективна именно первая — внезапная — атака, и поэтому настаивали на тщательном выполнении первого захода. Предельная дальность обзора в режиме прицеливания составляла 1000 ярдов (914 метров), дистанция эффективного огня — около 250 ярдов (229 метров).
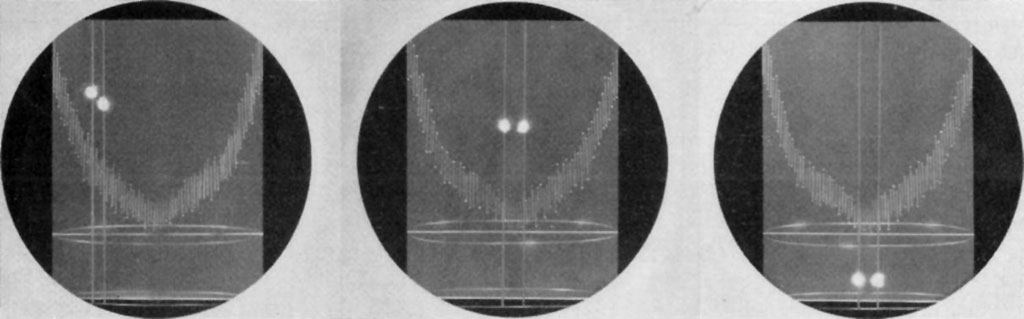
Наконец, четвертым режимом была НАВИГАЦИЯ с помощью наземных радиомаяков. В этом режиме радар посылал короткий идентификационный сигнал, на который откликались автоматические транспондеры радиомаяков в пределах радиуса действия. Маяки посылали в ответ кодированные сигналы, визуализировавшиеся на экране как серия горизонтальных полосок с промежутками между ними:
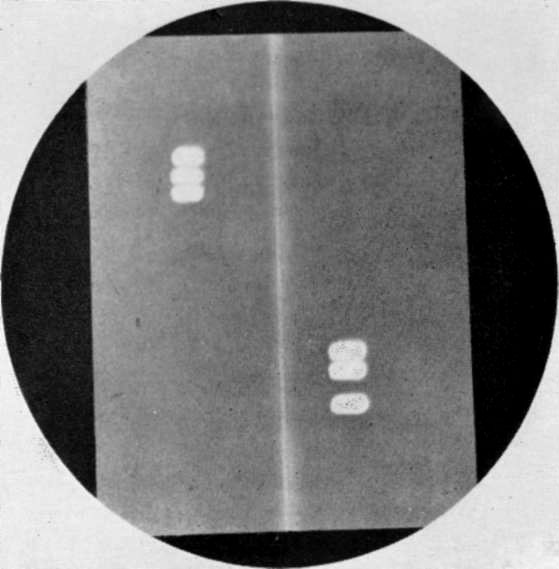
По этим полоскам, пилот мог идентифицировать конкретный радиомаяк, и по их положению на экране — установить азимут на него и приблизительную дальность. В навигационном режиме, эффективная дальность радара существенно возрастала (так как он принимал не отраженное эхо своего сигнала, а ответный импульс транспондера), достигая 185 км (100 морских миль).
ПРИМЕНЕНИЕ
Радары AN/APS-6 начали поступать на вооружение «ночных» эскадрилий американских авианосцев в 1944 году. Первыми были модели AN/APS-6A, имевшие несколько упрощенную конструкцию и требовавшие более частой ручной настройки; полноценные AN/APS-6 добрались до флота только к сентябрю 1944 года. Всего до окончания Второй Мировой Войны было изготовлено около 740 радаров AN/APS-6A и порядка 2100 радаров AN/APS-6. Заказ еще на 1400 единиц был отменен после победы.
Основным носителем AN/APS-6 изначально предполагался F4U «Corsair», но по логистическим соображениям было решено переделывать в ночные перехватчики наиболее массовые истребители флота F6F «Hellcat». Также этот радар устанавливался на двухмоторные истребители F7F «Tigercat», использовавшиеся в конце войны Корпусом Морской Пехоты. Оснащенные радарами истребители сначала включались по четыре в обычные палубные эскадрильи, образуя «секцию ночных перехватчиков», также принимавших участие в дневных операциях.

В дальнейшем, флот США начал создавать специализированные ночные эскадрильи, состоявшие из оснащенных радарами истребителей и авианосцев. Они летали с особо назначенных «ночных» авианосцев, летный персонал которых был специально обучен для взлетно-посадочных операций в ночное время суток. Обычной тактикой было патрулирование впереди флота, во взаимодействии с оснащенными поисковыми радарами эсминцами радарного пикета. Эсминцы своими мощными РЛС засекали приближающиеся воздушные цели, и направляли на них перехватчики. Сблизившись, перехватчики использовали собственные радары AN/APS-6, чтобы сблизиться с целью и атаковать ее.
Несмотря на первоначальные проблемы (некоторые резисторы оказались изготовлены из восприимчивого к влажности материала, который быстро деградировал в морском воздухе и требовал частой замены), радары AN/APS-6 быстро завоевали популярность у пилотов. Летчикам нравилась простота эксплуатации и высокая точность нового оборудования — особенно наличие режима радарного прицела, позволявшего атаковать невидимую цель не только ночью, но и, например, сквозь плотные облака. Эффективность действий ночных перехватчиков была вполне очевидна: за период с марта по май 1945 года, они сбили 91 японский самолет над Тихим Океаном. Этим они положили конец все более частым японским ночным атакам. Вице-адмирал МакКейн, командующий знаменитой TF38, с удовлетворением отмечал, что «результаты ночных эскадрилий всегда были превосходны», и особенно что «японцы не рисковали атаковать нас по ночам, даже когда точно знали наше положение и, несомненно, имели рядом множество камикадзе, горящих желанием попробовать».





