
Механические самураи: японские акустические торпеды
Механические самураи: японские акустические торпеды
Содержание:
Как неоднократно отмечалось ранее, японцы использовали камикадзе не потому, что им нравилась сама идея, а потому, что доступные альтернативы приводили лишь к еще большим потерям. И если с пилотируемыми самолетами-снарядами японские адмиралы еще были готовы мириться как с неизбежным злом, то пилотируемые торпеды “Кайтен” всех исключительно раздражали. Зрение – главный сенсорный инструмент человека – крайне слабо подходило для наведения торпеды в толще воды, тем самым делая саму по себе идею “Кайтена” малоосмысленной. Вдобавок, “Кайтены” были еще и громоздкими, неуклюжими, и сильно осложняли жизнь подводной лодке-носителю.
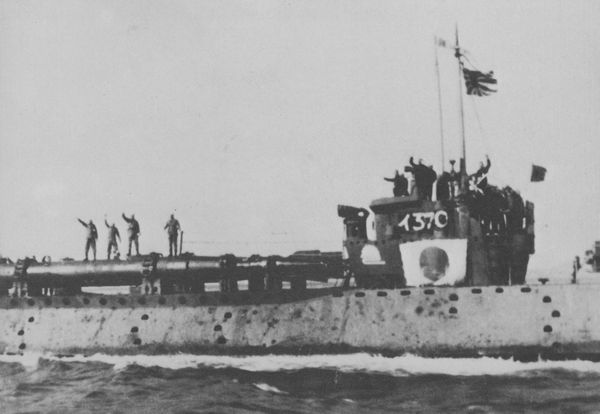
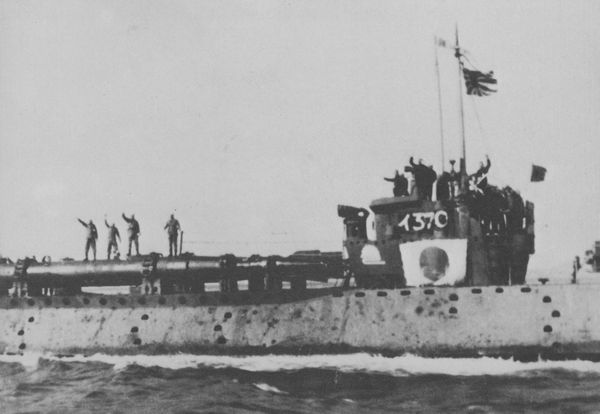
Пилотируемые торпеды «Кайтен» на борту японской субмарины. Ни скрытности ни маневренности — которые и так были в дефиците — это японским подлодкам не прибавляло
Решением проблемы могли бы стать самонаводящиеся торпеды, нацеливающиеся на звук винтов корабля-цели. Подобного рода оружие было в 1943 году развернуто Германией (акустическая торпеда G7e Falke) и США (противолодочная торпеда Mark 24 FIDO). Интересно, что хотя японцы, несомненно, знали о немецких акустических торпедах, конкретные германские технические решения их не заинтересовали. По-видимому, японцы считали, что вполне смогут сделать акустическую торпеду и без помощи.
И в общем-то были правы.
В 1943-1944 (точная дата неясна) военно-морской арсенал Куре начал работу над двумя типами акустических самонаводящихся торпед. Одна планировалась как противокорабельное оружие, другая – как противолодочное. Обе торпеды разрабатывались на базе стандартной флотской электроторпеды Тип 92, предназначенной для вооружения подводных лодок. Попыток оснастить головкой самонаведения парогазовые торпеды Тип 95 или кислородные торпеды Тип 93 (“Лонг-Лэнс”) не предпринималось. По всей видимости, японские инженеры считали не-электрические торпеды слишком шумными.
Тип 1 (японское обозначение неизвестно)
Первый проект самонаводящейся торпеды был наиболее простым и основывался на сопоставлении акустических сигналов по интенсивности. На корпус стандартной флотской электроторпеды Тип 92 была установлена новая головная часть, включавшая систему самонаведения. Два магнитострикционных гидрофона – т.е. основанных на изменении магнитных свойств тела при изменении линейных размеров под внешним воздействием – были установлены в передней части торпеды. Гидрофоны были отклонены вправо и влево соответственно на 30 градусов от центральной оси торпеды. Общая чувствительная площадь гидрофонов составляла около 78 см2, а ширина диаграммы направленности каждого была равна 70 градусам.
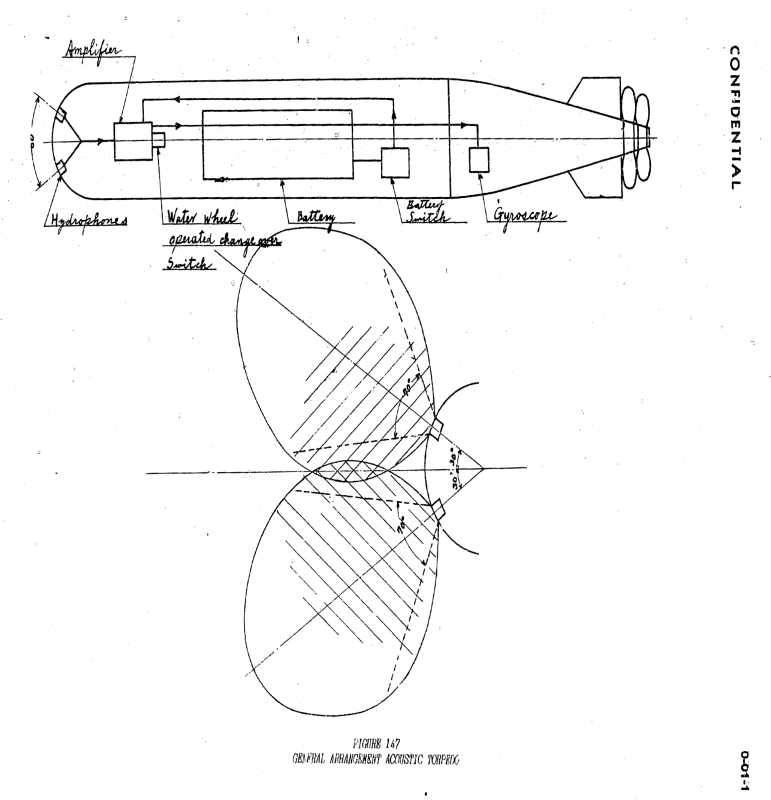
Общая схема устройства (вверху) и диаграмма лепестков чувствительности ГСН (внизу) торпеды тип 1
Сигнал от гидрофонов передавался на общий усилитель, последовательно подключавшийся к каждому из гидрофонов при помощи механического переключателя, срабатывавшего с частотой 25 переключений в секунду. Переключатель приводился в движение вертушкой на корпусе торпеды (вероятно, чтобы не создавать лишних электрических помех). Усилитель, стандартизированного гетеродинного типа, был заимствован от флотских систем связи.
Усиленные сигналы подавались на пару дифференциальных реле, замыкавшихся в том случае, если между сигналами с гидрофонов возникала ощутимая разница. Каждое дифференциальное реле было снабжено механизмом задержки, который активировал исполнительный контур только в случае, если дифференциальное реле оставалось замкнутым более двух секунд. Это было предусмотрено, чтобы случайные колебания сигналов не сбивали торпеду с курса.
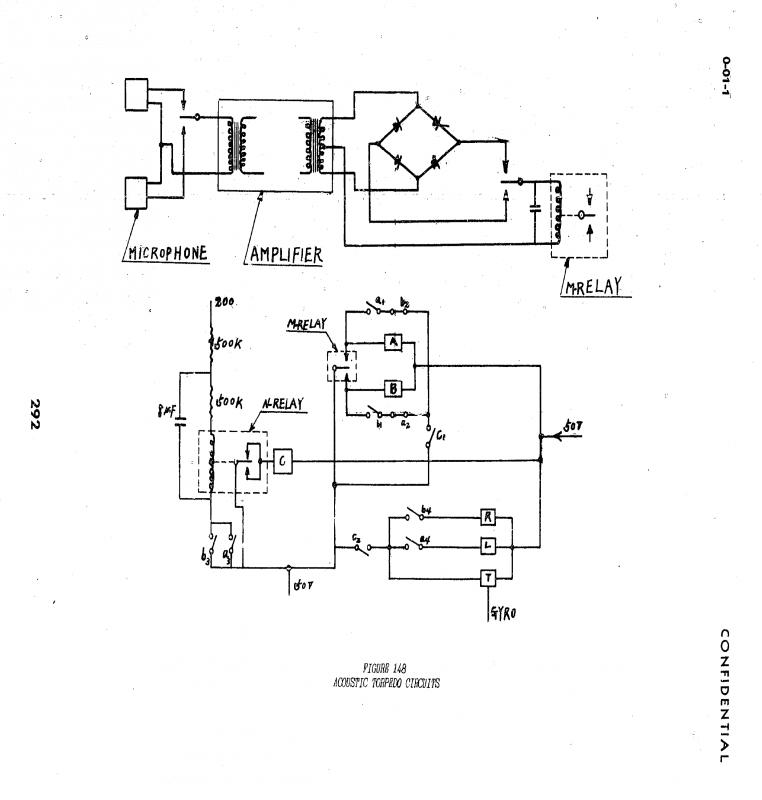
Схема связи микрофона через усилитель с исполнительным контуром (вверху) и релейная схема исполнительного контура (внизу)
Если разница между сигналами сохранялась более двух секунд (то есть не была случайной флюктуацией), то дифференциальное реле приводило в действие исполнительный контур. Исполнительные реле отключали гироскоп торпеды от системы управления, и заряжали соленоиды, открывавшие соответствующие клапаны в пневматической системе управления рулем. В зависимости от того, сигнал с правого или левого гидрофона становился сильнее, автоматика отклоняла торпеду в противоположную сторону до тех пор, пока сигнал с противоположного гидрофона не усиливался. Система, видимо, не была приспособлена для удержания цели в равносигнальной зоне: вместо этого, торпеда двигалась зигзагом, “проскакивая” точку равновесия. Впрочем, с учетом невысокой чувствительности японских гидрофонов, зигзагообразный курс, скорее, увеличивал шансы на попадание.
На испытаниях, торпеда продемонстрировала удовлетворительные характеристики, различая сигналы с угловым разрешением до 2 градусов. Однако, система самонаведения эффективно работала только на скорости до 20 узлов. На скорости выше двадцати узлов, шум от самой торпеды начинал заглушать шум винтов цели, и вероятность срыва наведения возрастала экспоненциально.
Японское флотское командование подобные ограничения не устраивали. В отличие от немецких субмарин (основной целью которых было гражданское судоходство), основной задачей японских подводных лодок было уничтожение военных кораблей противника. Ограниченная скоростью в 20 узлов торпеда могла бы быть эффективна против транспортов, но едва ли против быстроходных крейсеров и авианосцев. Инженеры, работавшие над проектом, предложили ряд усовершенствований – в основном сводившихся к улучшению обтекаемости – но в итоге, работы над торпедой были остановлены и все усилия сосредоточены на более прогрессивном решении.
Тип 2 (официальное обозначение Тип 92NR)
Второй проект управляемой торпеды использовал более совершенную методику управления. Сигналы от гидрофонов не сравнивались по интенсивности, а сопоставлялись по фазе. В зависимости от ориентации гидрофонов относительно источника сигнала, наблюдался фазовый сдвиг между сигналами, который распознавался при помощи лампового логического элемента (тиратрона) и приводил в действие соответствующие исполнительные контуры.
Условная схема устройства торпеды Тип 92NR. Судя по наличию водометного движителя — это схема предполагавшегося усовершенствованного варианта
Достоинством подобной системы было то, что разница в сигналах не зависела от интенсивности звука. Таким образом, случайные внешние помехи не влияли на работу наведения.
В корпус стандартной торпеды Тип 92 была сделана вставка позади боеголовки. Два гидрофона были установлены по бокам корпуса в небольших углублениях, и тщательно изолированы резиновыми прокладками от шумов самой торпеды. Точная конструкция гидрофонов неизвестна, возможно, использовались те же, что и на предыдущей модели.
Принятые сигналы от каждого гидрофона пропускались через полосовой фильтр, который отсекал частоты за пределами интересующей полосы. Ламповый усилитель преобразовывал сигналы в форму прямоугольных колебаний (меандры), которые затем сопоставлялись при помощи тиратрона, выполняющего логическую функцию ИЛИ. Если фазы сигналов совпадали, выходное напряжение тиратрона было равно нулю. Если же фазы сигналов расходились, тиратрон начинал формировать собственные импульсы, замыкавшие дифференциальные реле.
Электронная схема торпеды Тип 92NR
Система исполнительных механизмов и реле была полностью идентична предыдущему проекту. Дифференциальные реле замыкались в зависимости от импульсов тиратрона, и (через механизм задержки, отфильтровывающий случайные колебания) приводили в действие исполнительный контур. Исполнительные реле отключали гироскоп торпеды от системы управления, и заряжали соленоиды, открывавшие соответствующие клапаны в пневматической системе управления рулем. Торпеда поворачивала в соответствующем направлении, до тех пор, пока фазовый сдвиг не сводился к нулевому. Неясно, была ли система наведения приспособлена к удержанию цели в равносигнальной зоне, или же Тип 92NR, подобно предыдущей модели, должна была двигаться зигзагом.
Принципиальное устройство электронной системы торпеды Тип 92NR
Экспериментальная торпеда была оснащена только системой управления в горизонтальной плоскости. Однако, последующие образцы должны были быть оснащены системой управления и в вертикальной плоскости, тем самым позволив использовать торпеду как противолодочную (для чего серийные торпеды должны были быть оснащены неконтактным магнитным взрывателем). Именно эта возможность в наибольшей степени привлекала японских адмиралов, и поэтому все известные тесты торпеды Тип 92NR проводились против субмарин в погруженном положении.
На испытаниях, торпеда продемонстрировала следующие характеристики:
- Угловое разрешение до 1 градуса.
- Максимальная дистанция “захвата” погруженной субмарины, идущей на 5 узлах – 100 метров.
- На дистанции в 100 метров, шум винтов идущей на 5 узлах субмарины примерно в 6-7 раз превосходил фоновой.
Хотя испытания были, в целом, успешны, они также выявили целый ряд проблем. Электронная система торпеды требовала чрезвычайно точной настройки перед применением, в противном случае головка самонаведения оказывалась неработоспособна. Японские офицеры вполне прагматично сомневались, что требуемый уровень точности будет регулярно достижим в полевых условиях. Электронная аппаратура торпеды была чувствительна к ударам и сотрясениям, что создавало большие затруднения при пуске. Наконец, шум винтов самой торпеды оказался слишком сильной помехой.
Схема, иллюстрирующая принцип работы ГСН торпеды Тип 92NR и оценку разницы по фазе сигналов
Главной же проблемой оказалась сложность контроля в вертикальной плоскости, ввиду отражения акустического сигнала от поверхности воды. При управлении по горизонтали это не было проблемой, но при управлении по вертикали, подобное “эхо” нарушало картину сигнала. В результате, возможность применения торпеды, как противолодочной, оказалась под вопросом.
В попытке решить проблемы, ряд усовершенствований был предложен. Чтобы ослабить собственный шум торпеды, все ее механизмы собирались тщательно амортизировать резиновыми шумопоглощающими прокладками. Более радикальным предложением было заменить противовращающиеся винты торпеды водометным движителем с единственным импеллером. Стабилизацию по крену (так как единственный импеллер создавал бы сильный опрокидывающий момент) предполагалось осуществлять с помощью направляющих лопаток. Однако, решить проблему с неспособностью гидрофонов управлять торпедой в вертикальной плоскости быстро не удалось, и в начале 1945 года работы над проектом были прекращены.
Заключение
Хотя японцам так и не удалось развернуть управляемые торпеды в ходе войны (что было связано во многом с поздним началом работ), тем не менее, их экспериментальные образцы продемонстрировали изобретательность и нестандартный подход к проблеме. Японцы не стали зацикливаться, как немцы, на примитивных решениях. Хотя они и опробовали простой подход (сравнение сигналов по интенсивности), они также разработали и испытали намного более прогрессивное решение: сопоставление сигналов по фазе. Исходя из направления японской работы, можно отметить, что японцы почти нашли решение проблеме защиты своих коммуникаций от американских субмарин… но слишком поздно, когда на детальную его проработку просто уже не оставалось времени.
Источники
* Reports of the U.S. Naval Technical Mission To Japan (1945 – 1946): O-01-1; Japanese Torpedoes and Tubes – Article 1, Ship and Kaiten Torpedoes;
источник: https://fonzeppelin.livejournal.com/45730.html
")


