

Продолжение цикла статей, посвященных истребителю General Dynamics F-16 Fighting Falcon с канала Михаила Никольского на яндекс-дзене.
Программа AFTI (Advanced Fighter Technology Integration), работы по которой начались в 1979 г., изначально представляла собой дальнейшее продвижение по дороге разработки маневренного истребителя, конфигурация которого определялась системой управления. Руководство программой AFTI осуществляли ВВС США, но заметную роль в ее реализации сыграли NASA, авиация ВМС и авиация сухопутных войск.
В качестве платформы для проведения летных экспериментов был выбран шестой предсерийный F-16A (с/н 75-0750). На самолете установили передние поверхности управления, как на YF-16 CCV, аналоговую ЭДСУ заменили совершенно новой трехканальной цифровой системой DFCS (Digital Flight Control System). Дополнительное электронное оборудование и контрольно-записывающую аппаратуру разместили в обширном гагроте. Все доработки производились фирмой «Дженерал Дайнемикс» на заводе в Форт-Уорте.

YF-16 CCV

Дополнительные поверхности управления на F-16 AFTI
В современной литературе F-16A, модернизированный по программе AFTI, обычно обозначается F-16 AFTI, реже (почти никогда) NF-16A. В документах ВВС США 80-х гг. эти обозначения не встречаются, а самолет проходит как AFTI/F-16A, аналогичная надпись украшала киль машины. Не суть важно, как именовать самолет – пусть будет современное общепринятое.
Полеты по программе AFTI выполнялись на авиабазе Эдвардс. За самолет и его обеспечение отвечал испытательный центр ими. Драйдена NASA, а не Испытательный центр ВВС., при этом F-16 AFTI оставался в собственности ВВС.
Первый полет F-16 AFTI выполнил 10 июля 1982 г. в Форт-Уорте, через пять дней самолет перелетел на авиабазу Эдвардс.

F-16 AFTI в исходной конфигурации
Испытания по первому этапу начались в июле 1982 г. На первом этапе испытаний отрабатывалась многорежимная трехканальная цифровая система управления полетом (Digital Flight Control System, DFCS) с четырехкратным резервированием и ее законы управления. В целом же первый этап испытания стал продолжение на новом техническом уровне (цифровая ЭДСУ вместо аналоговой) испытаний YF-16 CCV, но уже с прицелом на выполнение конкретных боевых задач – ведения воздушных боев.
Испытания по 1-му этапу завершились 30 июля 1983 г., всего было выполнено 118 полетов с налетом 177 ч. По завершению 1-го этапа самолет перелетел с авиабазы Эдвардс в Форт-Уорт для модернизации – установки цифровой СУВ AMAS (Auto Maneuvering Attack System).

F-16 AFTI, авиабаза Эдвардс, 1982 г.
По результатам 1-го этапа испытаний удалось сформировать требования к цифровой СУВ, сопряженной с цифровой ЭДСУ. СУВ, однако, была оптимизирована не для воздушного боя, а для нанесения ударов по наземным целям. СУВ оставалась сугубо экспериментальной системой, не предназначавшейся для установки на серийные F-16, тем не менее основное назначение системы наглядно демонстрирует эволюцию взглядов командования ВВС США на самолет F-16 – от воздушного бойца к ударной машине.
БРЭО самолетов F-16 первого поколения (А/В) сознательно выполнялось как набор кубиков, с минимально возможным уровнем комплексирования. БРЭО F-16 AFTI, подготовленного для испытаний по 2-му этапу, наоборот, было максимально комплексированно – СУВ (AMAS) и ЭДСУ, по сути, представляли собой единую цифровую систему.
Система AMAS появилась как следствие прогноза действий авиации в гипотетическом вооруженном конфликта не столь отдаленного будущего. Развитие средств ПВО резко снижало шансы на поражение цели и на выживаемость самолета, поэтому уничтожать следовало в первой атаке, выполняемой с маневра на малой высоте, с высокой скоростью и, к тому же, обычным, а не высокоточным оружием, которого в арсеналах США имелось немеряно – не выкидывать же добро. В пассаже про вооружение иронии нет совсем. Цитата из отчета по подэтапам А и В 2-го этапа летных испытаний («АFTI/F-16 Automated Maneuvering Attack System Test Reports/Special Technologies and Outlook»):
— Наша тактическая авиация, поскольку в арсеналах хранится огромное количество неуправляемых обычных боеприпасов, должна быть способна выполнять возлагаемые на нее задачи путем использования дешевых боеприпасов.
Атака с малых высот на большой скорости, тем более с маневра, практически не оставляет летчику времени не то, что на коррекцию траектории полета перед сбросом боевой нагрузки, а даже на осознание необходимости такой коррекции. Системы AMAS и DFCS на время атаки объединялись в замкнутый контур управления, без участия летчика. Прицельные данные от СУВ транслировались в ЭДСУ. Пересчет прицельных данных выполнялся в реальном масштабе времени с учетом текущих параметров полета, поэтому появилась возможность выполнять сброс бомб и пуск НАР с произвольного маневра. Уместно сделать небольшое отступление. Концепцию, близкую AMAS, реализовали российские специалисты из ЗАО «Гефест и Т» в 2000-е гг. в прицельно-навигационном комплексе СВП-24 бомбардировщика Су-24М, но сделали это гораздо красивее и намного дешевле. Комплекс СВП-24, в отличие от AMAS, стал штатным для самолетов строевых частей. Более того, СВП-24 возможно адаптировать практически к любому ударному ЛА, от дальнего бомбардировщика Ту-22М3 до боевого вертолета Ка-52.

Су-24М с системой СВП-24 на испытаниях в Липецке. Надпись «ГЕФЕСТ» нанесена на стенки воздухозаборников с обоих бортов

Су-24М с системой СВП-24 на испытаниях в Липецке. Надпись «ГЕФЕСТ» нанесена на стенки воздухозаборников с обоих бортов
Комплекс AMAS/DFCS был развитием экспериментальной интегральной системы управления вооружением и полетом IFFC (Integrated Flight/Fire Control), проходившей испытания на истребителе F-15. В ходе испытаний F-15 IFFC поразил огнем из бортовой пушки на встречном курсе мишень QPM-102, выполнял маловысотное бомбометание с виража. Выполнить полноценное сопряжение системы IFFC с механической системой управления истребителя F-15 было крайне затруднительно, зато сопряжение цифровой СУВ AMAS с цифровой ЭДСУ самолета F-16 AFTI напрашивалось. На F-16 AFTI этапа 2 реализовали полностью замкнутый автоматический контур выполнения атаки, исключив из него летчика и, тем самым, значительно расширив диапазон допустимых маневров на малой высоте и большой скорости.
Испытания по этапу 2 преследовали целью дать ответы на два вопроса: насколько комплекс AMAS/DFCS повышает точность применения неуправляемого вооружения и какой должна быть степень автоматизации и состав такого комплекса, предназначенного для одноместного истребителя. Комплекс AMAS/DFCS дополнили системой речевого ввода команд и нашлемным прицелом фирмы «Ханиуэлл». Нашлемный прицел предназначался только для использования при атаках наземных целей и был сопряжен с ИК обзорно-прицельной системой. ИК система включала один блок датчиков (тепловизор и лазерный дальномер), размещенный в обтекателе в корневом наплыве правой плоскости крыла; аналогичный обтекатель, но без датчиков, для аэродинамической симметрии был смонтирован в наплыве левой плоскости. Датчики обзорно-прицельной системы просматривали лишь часть передней и правой полусфер, поэтому атаки из левого виража исключались.
Во всех исторических источниках, посвященных F-16, говорится, что обзорно-прицельные системы на самолете F-16 AFTI были установлены гораздо позже, однако в Отчете, датированным 1986 г., приведен рисунок самолета с сигарообразными обтекателями обзорно-прицельно системы, смонтированным в обоих корневых наплывах. В самом отчете обзорно-прицельной системе (комплексу) отведено изрядное место – STS (Sensor/Tracker Set) является главным датчиком системы AMAS самолета F-16AFTI; STS разработан фирмой «Вестингауз» по заказу фирмы «Дженерал Дайнемикс».
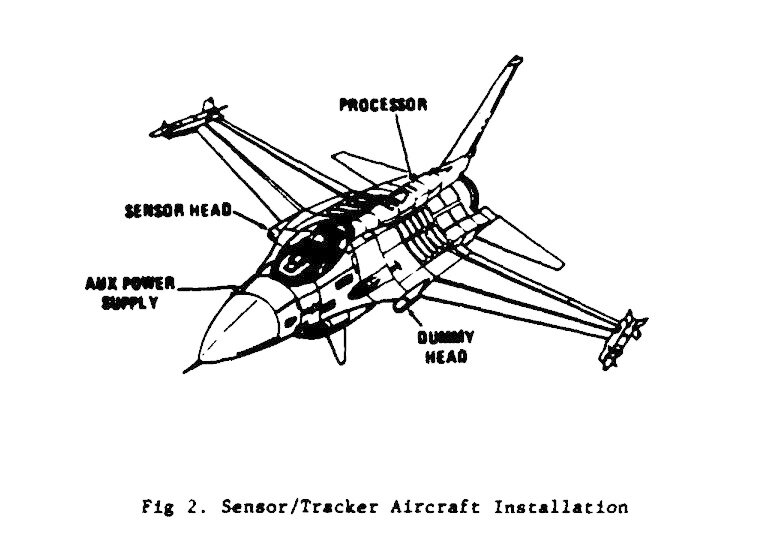
Рисунок из отчета по 2-му этапу испытаний F-16 AFTI

F-16 AFTI, авиабаза Эдвардс, 1984 г. В наплыве крыла установлен обтекатель с обзорно-прицельной системой
На AFTI 2-го этапа практически полностью заменили приборное оборудование кабины, установив два монохромных и один цветной электронно-лучевых многофункциональных дисплея, на один из которых (цветной) выводилась цифровая карта местности и вся необходимая для выполнения атаки информация; конфигурация приборной доски была близка, но не тождественна, конфигурации приборных досок самолетов F-16C/D.
Летчик F-16 AFTI 2-го этапа получил возможность в случае потери пространственной ориентации привести самолет в нейтральное положение (нулевые углы крена и тангажа) простым нажатием кнопки на рукоятке управления. Этот «дивайс» американцы подсмотрели на МиГ-29, система приведения МиГа к нейтрали поразила американцев едва ли не больше, чем сам самолет. С технической точки зрения данная система далеко не самая сложная, но ведь до нее додуматься требовалось!

Старший летчик-испытатель фирмы «Дженерал-Дайнемикс» Фил Отсричер знакомится со спаркой МиГ-29УБ, Фарнборо, 1988 г.

АМАS обеспечивала поражение как наземных, так и воздушных целей, хотя уклон был сделан на работу по земле. Воздушный бой рассматривался исключительно как атака под значительным ракурсом с использованием только бортовой пушки, зато требования к атаке наземной цели предъявлялись очень жесткие: бомбометание и стрельба из пушки по наземной цели днем и ночью в простых и сложных метеоусловиях, с высоты 60 м (200 футов) при перегрузке 5-6g. Система АМАS, при этом, являлась «экспериментом в чистом виде».
Атака с малых высоты на большой скорости предполагала наличие на борту автоматической системы следования рельефа местности. На F-16 AFTI установили две системы следования рельефу местности, одна, сложная, была основана на использовании цифровой карты местности, вторая, более простая, — на основе бортового радиовысотомера с суммарной круговой диаграммой направленности (четыре антенны радиовысотомера установлены на нижней поверхности носовой части фюзеляжа). Работами по цифровым картам местности уже давно занималась фирма «Харрис», но велись они в интересах армии США. Генератор цифровой карты местности, скорее всего, стал единственным, но достаточно важным, вкладом армии США в программу AFTI. Карта местности выводилась на цветной индикатор в кабине летчика, на нем же отображалось текущее местоположение самолета. ЭДСУ, без вмешательства летчика, вырабатывала управляющие сигналы на обход препятствий по высоте или по горизонту.
Еще одной новинкой, подлежащей проверке на F-16 AFTI, была речевая система ввода команд. Прообраз этой системы испытывался на первом этапе программы AFTI, но тогда определялась принципиальная возможность функционирования системы в полете с высокими перегрузками, когда параметры человеческой речи существенно изменяются. Результаты получили обещающие. Вероятность распознавания команд составила 95%, поэтому было принято решение на втором этапе испытать речевую систему в полном объеме. Понятно, что та речевая система имела мало общего с современными голосовыми помощниками вроде Алисы. Летчик заранее наговаривал команды, команды оцифровывались и вводились в память речевой системы. В полете речевая система выбирала нужную команду путем сравнения цифровых образов с голосом летчика, тоже оцифрованным, но в реальном масштабе времени. Взаимозаменяемой «по летчикам» речевая система не была.
Голосовой помощник предназначался для выбора режимов работы индикаторов на приборной доске и каналов радиосвязи. Речевая система полностью вписывалась в идеологию выполнения летчиком боевой задачи без отрыва рук от РУС и РУД. Переключатели основных систем (выбор оружия и т.д.) на F-16 AFTI были сгруппированы на РУДе (на РУС сохранился в наследство от YF-16 CCV тумблер управления передними поверхностями управления), а вот выбор режима работы индикаторов осуществлялся нажатием одной из кнопок, окаймлявших экраны. Помимо оценки работоспособности речевой системы, ставилась задача определить необходимое количество команд и составить представление о том, насколько речевая система способствует снижению нагрузки на летчика, то есть – выяснить стоит ли овчинка выделки.
Испытания по 2-му этапу проводились на авиабазе Эдвардс с июля 1984 по май 1987 гг. Любопытно, что летчики отмечали излишнюю чувствительность самолета к управлению по крену – привет YF-16A и летчику-испытателю Остричеру. По результатам 2-го этапа испытаний был сделан следующий вывод:
— Система AMAS продемонстрировала заложенные в нее возможности в части поражения воздушных и наземных целей. … Наземные цели возможно поражать с малых высот в полете по искривленной траектории. … Система АМАS способствует повышению боевой эффективности самолета, увеличивает вероятность поражения наземных целей и снижает нагрузку на летчика в полете. Результаты испытаний свидетельствуют о значительном потенциале AFTI/F-16 в приложении к дальнейшим разработкам.
Тема авиационной поддержки сухопутных войск получила развития на 3-м и 4-м этапах испытаний F-16 AFTI, имевших также обозначения CAS-1 и CAS-2 (Close Air Support). Эти этапы испытаний проводились в контексте разработки на основе истребителя F-16 ударного самолета А-16 способного выполнять задачи изоляции района боевых действий и непосредственной авиационной поддержки.
Основной упор был сделан на испытания и отработку различных обзорно-прицельных систем. Систему STS в правом наплыве крыла дополнили аналогичной по назначению системой, блок датчиков которой монтировался на левой поверхности фюзеляжа перед фонарем кабины. На стенках воздухозаборника появились пилоны для подвески контейнеров системы LANTIRN. СУВ AMARS была серьезно доработана. Еще одним важным отличием F-16 AFTI/CAS была возможность получения внешнего целеуказания по закрытому цифровому каналу связи; марки целей в этом случае отображались на ИЛСе. Еще одним важным отличием F-16 AFTI/CAS была возможность получения внешнего целеуказания по закрытому цифровому каналу связи; марки целей в этом случае отображались на ИЛСе.



F-16 AFTI в конфигурации 1991 г.

F-16 AFTI, осень 1992 г. Перед фонарем кабины смонтировано два блока датчиков обзорно-прицельной системы
Испытания по этапу 3 (CAS-1) проводились с января 1988 по декабрь 1989 гг.
Перед 4-м этапам испытаний самолет прошел серьезную модернизацию: были установлены плоскости крыла, аналогичные плоскостям самолета F-16C блок 25, РЛС AN/APG-68 (как на F-16C/D блок 40), в СУВ интегрирован интерфейс обмена с обзорно-прицельной системой LANTIRN. Наследие концепции CCV – передние поверхности управления демонтировали.
Контейнеры системы LANTIRN существенно ухудшали аэродинамику самолета, поэтому на F-16 AFTI 4-го этапа была сделана попытка перенести оборудование из контейнеров в фюзеляж, а два блока датчиков разместили в обтекателях на верхней поверхности фюзеляжа перед фонарем кабины. Опыт оказался не очень удачным и эти блоки датчиков по завершению 4-го этапа испытаний демонтировали. Четвертый этап испытаний завершился в январе 1992 г. Завершение испытаний 4-го этапа, скорее всего, было вынужденным, поскольку после операции «Буря в Пустыне» тема А-16 утратила свою актуальность.
В дальнейшем самолет летал по различным программам, связанным с испытаниями целевого оборудования и вооружения.
F-16 AFTI использовался в качестве демонстратора технологий авиационного комплекса, предназначенного для подавления ПВО. Изюминкой комплекса должна была стать система сбора, обобщения и распределения информации. В рамках программы «Talon Sword Bravo»19 мая 1994 г. с F-16 AFTI впервые был выполнен пуск противорадиолокационной УР AGM-88 HARM с внешним целеуказанием от самолета ЕА-6В авиации ВМС США. По программе «Talon Sword Bravo» также выполнялись пуски противорадиолокационных ракет с целеуказанием от спутников.
В 1995 г. на F-16AFTI проверяли помехоустойчивость приемников спутниковой навигационной системы GPS и работоспособность автоматизированной системы предупреждения столкновения с земной поверхностью, в 1996 г. – испытывалась автоматическая система предупреждения столкновения с земной поверхностью (Automated Ground Collision Avoidance System, AGCAS).
NASA в 2000 г. вышло из программы AFTI. Отработку системы управления истребителя F-35 на F-16 AFTI ВВС США проводили самостоятельно. Это были последние испытания с участием F-16 AFTI, в феврале 2001 г. самолет передали в музей.

Современный, музейный, облик F-16 AFTI
Описывать программы CCV и AFTI только применительно к самолету F-16 означает вырвать их из контекста. Для полного ознакомления с «контекстом» потребовалось бы написать книгу – может кто-то напишет: когда-нибудь потом и не я. Те не мене, дать коротенькое представление о картине в целом попытаюсь.
Испытания F-4 ССV стимулировали развертывание работ в области повышения маневренности нетрадиционными методами на многих авиационных фирмах США. Все работы были рассчитаны на перспективу и все работы курировало NASA.

YF-4E CCV
Фирма «LTV» проработала минимум два варианта экспериментального сверхманевренного «Крусейдера» — простой и сложный. Простой F-8 CCV предполагал установку передних поверхностей управления по типу использовавшихся на F-4 CCV и ПГО при уменьшении площади вертикального оперения. Сложный вариант выполнили по мотивам «Крусейдер», фактически это был новый проект двухдвигательного истребителя с ПГО, дополнительными поверхностями управления (ССV!) и новым крылом с развитыми корневыми наплывами. В обоих случаях самолеты проектировались статически неустойчивыми по каналу тангажа, а в качестве основной системы управления предполагалось установить ЭДСУ. Проекты не довели даже до стадии постройки макета.
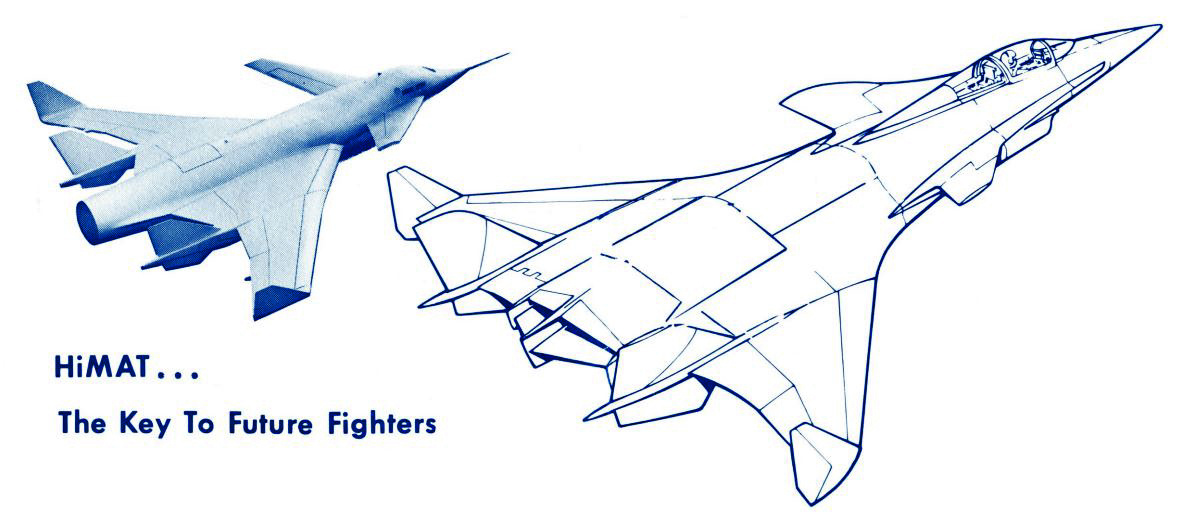
ВВС и NASA параллельно с концепцией CCV вели работы по конкурсной программе HiMAT (Highly Maneuverable Aircraft Technology). Программа HiMAT предусматривала разработку и постройку дешевого экспериментального дистанционно управляемого ЛА, предназначенного для отработки конфигурации перспективного самолета воздушного боя и перспективных конструкционных материалов. Под конфигурацией в данном случае надо понимать форму, количество и взаимное расположение поверхностей управления. В конкурсе приняли участие фирмы «LTV», «Рокуэлл» и «Грумман». Лучшим признали проект фирмы «Рокуэлл». В 1975 г. с фирмой был заключен контракт на постройку двух демонстраторов технологий, размеры которых составляли бы 44% от размеров полномасштабного пилотируемого истребителя. Силовая установка состояла из одного ТРДДФ J85-21. Демонстратор запускался из-под крыла носителя NB-52В, посадка выполнялась на лыжи. Первый свободный полет с отцепкой от носителя HiMAT выполнил 27 июля 1979 г. Испытания демонстраторов завершились в январе 1983 г., оба демонстратора выполнили 26 полетов с общим налетом 22,5 ч. Испытания дали обильную пищу для дальнейших исследований, но осадочек в виде шутки юмора относительно беспилотной техники остался:
— Два летчика в кабине В-52, один оператор наземной станции управления, один летчик самолета сопровождения TF-104G и один оператор станции управления в задней кабине самолета TF-104G. Так сколько летчиков требует беспилотная техника?
Такой вопрос задал инженер по летным испытания Центра им. Драйдена. Если серьезно, то демонстраторы действительно продемонстрировали выдающиеся маневренные характеристики (выполнялся вираж с перегрузкой 8g на скорости М=0,9), но в целом аппараты оценили как излишне сложные и чрезмерно дорогие – еще бы, пять летчиков на один БПЛА. Наработки по программе HiMAT были использованы в ходе работ по программе ATF, но связаны они были не с конфигурацией ЛА, а с автоматизированной системой управления.


Программа AFTI начиналась тоже как предтеча программы перспективного истребителя ATF (Advanced Tactical Fighter) для замены F-15. Результатом программы ATF стало принятие на вооружение ВВС США истребителя Локхид Мартин F-22A «Рэптор». «Рэптор» действительно проектировали в новой парадигме мышления: аэродинамика перестала быть главенствующей, но таковой не стала и система управления. Во главу угла поставили малозаметность в радиолокационной области спектра и целевое электронное оборудование. Маневренность отошла на задний план. Работы по программе ATF начались в 1984 г.
Смена парадигмы конструирования перспективного истребителя произошла не сразу, но в конечном итоге привела к пересмотру программы AFTI: от исследований по теме ATF к исследованиям по теме А-16. Отсюда – появление ИК обзорно-прицельной системы и СУВ AMAS, демонтаж передних поверхностей управления. Проведение испытаний F-16 AFTI по этапам CAS-1 и CAS-2 по времени согласуются с проведением НИОКР по А-16 и началом работ в 1991 г. по программе многоцелевого истребителя MRF (Multi-Role Fighter) – дополнению самолета ATF. Ветер перемен привел к урезанию осетра, оборонного бюджета. Вместо разработки самолета MRF в 1993 г. было принято решение в еще большей степени акцентировать ударные возможности F-16C/D и продолжить постройку для ВВС США самолетов F-16C/D блок 50. Уже через год решение 1993 г. подкорректировали – начались работы по программе JAST (Joint Advanced Strike Technology), ключевое слово Strike — ударный. Программа JAST мутировала в программу JSF (Joint Strike Fighter), известной ныне по удивительному многоцелевому самолету F-35 «Лайтнинг II». F-16 AFTI, получается, был непосредственным предшественником F-35.


источник: https://dzen.ru/a/ZcInFUIDw2fWDptQ





