
Ещё раз о Болдыреве и наноавиации. Реактивный микровертолёт.
 Вертолет А . И . Болдырева с реактивным приводом несущего винта проектировался в 1946-1947 гг. и был построен в 1948 г. в учебно-производственной лаборатории МАИ.
Вертолет А . И . Болдырева с реактивным приводом несущего винта проектировался в 1946-1947 гг. и был построен в 1948 г. в учебно-производственной лаборатории МАИ.
Конструкция вертолета, довольно простая и технологичная, отличалась новизной технических решений.
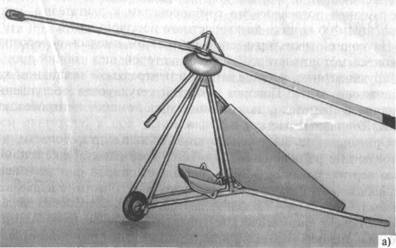
Реактивный вертолет А . И . Болдырева имел простейшую пирамидальную раму из дуралюминовых труб со стальными вставками в местах крепления. В ее верхней части расположили силовой узел крепления несущего винта, в средней — чашу-сиденье пилота, а основание рамы выполнили в виде опоры носового колеса и двух хвостовых костылей, разнесенных на 1,2 м. По оси колеса установили неподвижные педали-подножки. Амортизаторами служили пневматики диаметром 250 мм и костыли, имевшие значительную длину и достаточную эластичность концевых участков.
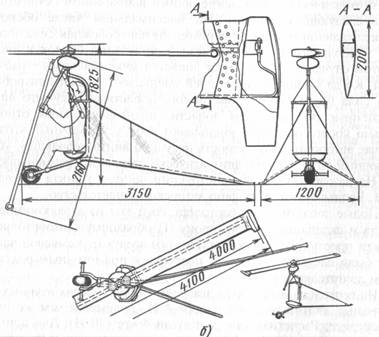 Концевые части костылей связаны с вертикальными опорами рамы (верхней ее части) тросами. Треугольники, образованные тросами, вертикальными опорами и трубами костылей, обтянутые герметичной тканью, образовывали вертикальные стабилизирующие поверхности — расщепленные кили.
Концевые части костылей связаны с вертикальными опорами рамы (верхней ее части) тросами. Треугольники, образованные тросами, вертикальными опорами и трубами костылей, обтянутые герметичной тканью, образовывали вертикальные стабилизирующие поверхности — расщепленные кили.
Несущая система соединялась с рамой вертолета в верхней ее точке с помощью карданного шарнира. Ось винта удлиненная. К нижней ее части у карданного шарнира крепилась ручка управления вертолетом, а на верхнем конце — втулка винта. Между карданным шарниром и втулкой винта расположен топливный бак эллипсоидной формы. Ось винта выполнена полой. Через нее топливо подавалось по трубопроводам к двигателям, установленным по концам двухлопастного несущего винта.
На конце ручки управления вертолетом имелась поворотная рукоятка мотоциклетного типа, от которой шел гибкий трос к дозирующей игле, установленной в центральном топливном канале в оси винта. Поворот рукоятки регулировал поступление топлива в двигатели, подаваемого при помощи центробежной силы. Топливных насосов не было.
Оригинальной была конструкция втулки винта. Лопасти, изготовленные на ремонтной базе ВВС, крепили к втулке с помощью вертикальных шарниров, осевых шарниров они не имели. Горизонтальный шарнир был один на две лопасти. Расположен он был под углом 4╟ к оси лопастей. Такое устройство втулки обеспечивало автоматическое управление общим шагом винта, что значительно упрощало конструкцию и не требовало отдельного командно-контрольного рычага управления.
Автоматическое управление общим шагом винта осуществлялось следующим образом. На максимальном числе оборотов (максимальной мощности двигателей) центробежная сила лопастей наибольшая, конус, ометаемый лопастями, близок к диску. В этом случае угол установки лопастей максимальный — расчетный. Когда мощность двигателей уменьшают, падает центробежная сила и угол конуса ометаемого лопастями несущего винта увеличивается. При этом лопасти, поднимаясь вверх относительно косого шарнира, уменьшают свой установочный угол. В случае авторотации конусность несущего винта небольшая, установочный угол лопастей автоматически становится наименьшим -0╟. На разработку такой конструкции несущего винта вертолета А . И . Болдыреву было выдано авторское свидетельство.
Полые лопасти винта вертолета, согнутые из дуралюминового листа и склепаные по лонжерону (П-образному с отбортовкой), имели простую конструкцию. По ним воздух от комлевой части, где были сделаны отверстия, поступал к прямоточным реактивным двигателям.
На вертолете установили два прямоточных двухконтурных реактивных двигателя конструкции А . И . Болдырева , им же изготовленные. Расчетная тяга двигателя 4 кгс (40 Н). Для испытаний и отработки двигателей на земле спроектировали и изготовили специальный стенд с принудительной подачей воздуха в двигатель. На стенде замерялись тяга и температура двигателя, расходы воздуха и топлива. Двигатели наработали на стенде по 4,5 ч. Тяга при испытании на стенде была доведена до 3,5 кгс (35 Н). Конструкция двигателя позволила увеличить примерно вдвое расход воздуха и, следовательно, КПД, который у прямоточного двигателя на дозвуковых скоростях довольно низкий. Кроме того, подача воздуха через лопасти снижала пульсацию двигателя, так как воздух, набегающий на входное сопло, шел не по оси двигателя, а под углом к ней и, кроме того, вибрировал. Двигатель был оригинальной и довольно сложной конструкции. На него А . И . Болдырев получил авторское свидетельство на изобретение.
Реактивный вертолет А . И . Болдырева имел запас горючего на 15 мин полета. Расчетная вертикальная скорость у земли — 2 м/с. Конструкция была выполнена складывающейся. В сложенном виде вертолет имел габаритные размеры 0,5×0,8×2,2 м, т.е. был довольно компактным.
Управление вертолетом по крену, тангажу и в путевом направлении осуществлялось непосредственным отклонением в нужную сторону оси вращения несущего винта. Винт крепился к вертолету на карданном шарнире и отклонялся с помощью ручки управления. Управление общим шагом винта осуществлялось автоматически при изменении тяги реактивных двигателей.
После сборки и регулировки вертолет прошел испытания в режиме авторотации в аэродинамической трубе. Затем вертолет испытывали как автожир, буксируя легковым автомобилем. Это происходило в Московской области в районе Павшина. Были небольшие подлеты. Испытывал вертолет А . И . Болдырев . Во время пробежки на буксире вертолет был неустойчив. Это объяснялось большим выносом колеса вперед. Испытания не были завершены. А . И . Болдырев получил от Н.И. Камова предложение продолжить разработку этого вертолета .
В 1955 г. А . И . Болдырев разработал проект трехместного реактивного вертолета . Его проект утвердил академик Б.Н. Юрьев. Вертолет должен был иметь: диаметр двухлопастного винта 7 м, полетную массу 550 кг, массу конструкции 170 кг. Предполагалось, что нагрузка на ометаемую винтом площадь должна составлять 14 кгс/м2, нагрузка на эквивалентную мощность -5,5 кгс/л.с. (7,48 кгс/кВт), максимальная скорость — 20 км/ч, скороподъемность — 3 м/с, расчетная тяга одного двигателя — 15 кгс (150 Н).
Изготовили продувочную модель и провели ее аэродинамические исследования. Вертолет имел хорошие расчетные летно-технические данные, но проект не был осуществлен.