

Содержание:
Зенитные ракеты семейства “Найк” в начале 50-ых еще только проходили испытания, а армия США уже хотела большего. Ей нужен был зенитно-ракетный комплекс для защиты передовых баз и войск на линии фронта.
“Найки” достаточно хорошо решали задачу обороны тыловых объектов от стратегической авиации, но для фронтового применения подходили слабо. Хотя формально “Найк” и считался “мобильной ракетой-перехватчиком” (анг. Mobile Interceptor Missile, MIM), на практике перевозка ракетной батареи с позиции на позицию была долгим и трудоемким процессом. Такие ракеты не годились для применения на стремительно меняющихся театрах войны атомной эры.
Также значимым недостатком была одноканальность “Найка”: одна батарея могла одновременно обстреливать ровно одну цель и ровно одной ракетой. Для тыловой обороны, имеющей дело с немногочисленными стратегическими бомбардировщиками, это было приемлемо. Для фронтовой ПВО, имеющей дело с массированными налетами тактической авиации – нет. Имелись у “Найков” также ограничения по времени реакции и минимальной высоте перехвата.
Поэтому в 1952 году армия США инициировала создание нового ракетного комплекса – высокомобильного (ну, или по крайней мере, пригодного для быстрой транспортировки с места на место), и способного обстреливать более одной цели более чем одной ракетой (чтобы одновременным пуском нескольких гарантировать сбитие). Основная ставка при этом делалась на новую технологию моноимпульсных радаров: способных определить точное положение цели в пределах одного цикла “передача-прием”, с помощью нескольких пространственных каналов. По сравнению с прежним коническим сканированием (когда положение цели определялось вращающейся антенной), моноимпульсные радары были значительно точнее и быстрее. Благодаря им, появилась, наконец, возможность поместить РЛС непосредственно в ракету и наводить ее на “эхо” радарного сигнала от цели.

Проект SAM-A-18 HAWK был инициирован осенью 1952 года. Вопреки, казалось бы, очевидной версии, слово “Hawk” в данном случае не означало “ястреб”. На самом деле, оно являлось аббревиатурой – HAWK – которая расшифровывалась как “Homing All-the-Way Killer” (англ. Непрерывно Наводящийся Убийца). По замыслу разработчиков, ракета должна была использовать полуактивное радиолокационное самонаведение: наводиться на отраженное от цели “эхо” луча наземного радара. Такая концепция позволяла обойтись всего одним радаром (вместо пары у “Найков”), и наводить сразу несколько ракет на одну цель. Кроме того, полуактивное самонаведение было значительно эффективнее командного при действии на малых высотах.
КОНСТРУКЦИЯ
Ракета HAWK имела пулевидную форму, с цилиндрическим корпусом и оживальной головной оконечностью. Ее оперение состояло из четырех Х-образно расположенных треугольных крыльев, на задней кромке которых располагались органы управления – элевоны, совмещавшие функции рулей высоты/направления и элеронов стабилизации по крену. Между крыльями по наружной обшивке ракеты проходили два технических “коридора”, по которым шли электрические кабели и патрубки гидравлической системы.
Наведение ракеты осуществлялось полуактивной радиолокационной головкой самонаведения, принимающей отраженное от цели “эхо” сигнала наземного радара. Размещенная под пластиковым радиопрозрачным обтекателем антенна моноимпульсного типа принимала сигнал сразу по нескольким пространственным каналам – и сопоставляя выходные данные от них, ламповая автоматика самонаведения выводила положение цели относительно ракеты. Антенна, установленная на карданном подвесе с гидравлическими сервоприводами, автоматически поворачивалась так, чтобы непрерывно удерживать цель в равносигнальной зоне приема антенны. Автопилот же ракеты корректировал ее курс в зависимости от положения антенны.
Чтобы максимально эффективно отслеживать радарную сигнатуру цели, ракета помимо “эха” также принимала исходный – референтный – сигнал наземного радара. Для этого на корпусе ракеты размещалась ненаправленная приемная антенна. Сопоставляя исходный сигнал с “эхом” от цели, автоматика ракеты Допплеровским методом значительно повышала точность фильтрации.
Для перехвата цели, HAWK использовал алгоритм пропорционального сближения: ракета наводилась так, чтобы угол визирования цели был постоянным, а дистанция непрерывно уменьшалась. Таким образом, HAWK не “гонялся за целью”, а шел в точку упреждения, где курс цели и курс ракеты пересекались. Головка самонаведения также непрерывно отслеживала дистанцию до цели, и в момент наибольшего сближения вырабатывала команду на подрыв боевой части.

Ракета HAWK приводилась в движение твердотопливным ракетным двигателем “Aerojet” M22E8 (на более поздних моделях – “Aerojet” Mk 112). Этот двигатель был двухрежимным, то есть выдавал значительную тягу на старте, а затем уменьшал ее и поддерживал равномерное горение на маршевом участке. За счет этого удалось отказаться от стартового ускорителя и уменьшить длину ракеты – немаловажно для жестко ограниченного по предельным габаритам армейского боеприпаса!
Двухрежимность двигателя реализовывалась за счет особой конструкции топливной шашки, состоявшей из двух вложенных друг в друга компонентов. Внутренний компонент (стартовый) состоял из быстро прогорающего топлива, и по его длине были просверлены Y-образные каналы, для увеличения площади горения. Внешний компонент (маршевый) состоял из медленно горящего топлива. При запуске ракеты, сначала зажигался и быстро прогорал внутренний компонент – обеспечивая максимальную тягу на старте – а затем начинал медленно гореть внешний.
Поджиг двигателя выполнялся пиротехническим воспламенителем типа “Alcojet”, представлявшем собой перфорированную стальную трубу, наполненную пиротехнической смесью, проходившую по центральному каналу топливной шашки. С помощью пиропатронов, зажигавшихся от наружного контакта на рельсе пусковой установки, пиротехническая смесь вспыхивала и ее равномерное горение обеспечивало поджиг пускового заряда.
Управление ракетой в полете, движение элевонов и антенны ГСН осуществлялось с помощью гидравлической сервосистемы “открытого” типа. Гидравлическая жидкость подавалась из резервуара избыточным давлением сжатого азота из баллона, и после использования в сервомоторах – просто сбрасывалась за борт. Регулировочный клапан поддерживал давление в сервосистеме постоянным все время полета ракеты. Органы управления – элевоны на законцовках крыльев – служили для контроля ракеты как по тангажу и рысканью, так и по крену.
Боевая часть ракеты (XM5E2) была осколочно-фугасного типа. Она представляла собой пластиковый цилиндр, начиненный взрывчатым веществом типа H-6 и обложенный снаружи слоем готовых поражающих элементов (4000 стальных кубиков весом около 8 граммов). Она создавала коническое поле поражающих элементов под углом в 15 градусов от курса ракеты. Считалось, что такое поле поражения будет наиболее оптимально по форме
Подрыв боевой части осуществлялся неконтактным взрывателем допплеровского типа M821, интегрированным в систему наведения ракеты. Когда дистанция до цели сокращалась до запрограммированного предела, в головке самонаведения срабатывал электронный контур, подающий команду на подрыв боеголовки. На случай прямого попадания ракеты в цель, имелся также ударный взрыватель мгновенного действия. Непосредственно подрыв выполнялся с помощью двух электрических детонаторов T20E1, управлявшихся с помощью интегрированного устройства взведения/безопасности M100. Это устройство, оснащенное чувствительными акселерометрами, взводило детонаторы только если ракета испытывала стартовую перегрузку в течении нескольких секунд непрерывно (т.е. случайный рывок или падение ракеты при погрузке не могли взвести детонаторы). Оно также отвечало за самоуничтожение ракеты при поломке или потере сопровождения цели.
Электропитание всех систем ракеты осуществлялось от электролитической батареи на 80 элементах. Жидкий электролит хранился отдельно в центральном резервуаре, и при запуске ракеты подавался в гальванические ячейки вытеснительной системой на пиротехническом газогенераторе. Батарея выводилась на рабочий режим примерно за 1 секунду и обеспечивала питание всех систем ракеты на протяжении 110 секунд.
Базовая версия системы HAWK могла поражать воздушные цели на удалении от 2 до 25 км (1,5-15 миль) от пусковой установки, на высоте от 60 до 11.000 метров (200-36.000 футов). Она была способна к перехвату как дозвуковых, так и сверхзвуковых целей. Вероятность перехвата цели одной ракетой оценивалась в 50-55%, что было весьма хорошим параметром.
БАТАРЕЯ HAWK
Стандартная батарея HAWK в базовой версии состояла из двух огневых взводов. Оба взвода могли развертываться совместно, а могли и разделяться, и располагаться на значительном расстоянии друг от друга.
Все элементы батареи располагались на буксируемых трейлерах и проектировались с расчетом на максимально быстрое соединение и рассоединение при транспортировке.

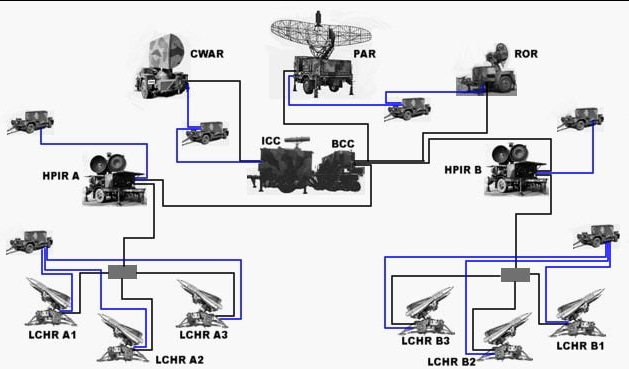
Для поиска и раннего обнаружения целей служил радиолокатор AN/MPQ-35 PAR (англ. Pulse Acquisition Radar – Импульсный Радар Обнаружения). Эта всепогодная РЛС с массивной вращающейся антенной (складывающейся при транспортировке) предназначалась для обнаружения целей на больших и средних высотах, на дистанции до 100 км. В его функции входила также идентификация целей по ответам их транспондеров “свой-чужой”, а также преодоление радиопомех и фильтрация ложных целей. Этот радар служил основным источником данных для батареи.

Допплеровский радиолокатор AN/MPQ-55 CWAR (англ. Continuous Wave Acquisition Radar – Радар Обнаружения Непрерывной Волны) предназначался для обнаружения целей на малых высотах. За счет допплеровского эффекта он мог выделять сигнатуры движущихся целей на фоне помех от рельефа, определять радиальную скорость и приблизительную дальность до целей. При необходимости, CWAR мог быть выделен как основное средство обнаружения для второго огневого взвода батареи – если тот развертывался отдельно.

Два радара AN/MPQ-46 HPIR (англ. High Power Illumination Radar – Радары Подсветки (цели) Высокой Мощности) предназначались для сопровождения конкретных выбранных целей и “подсветки” их лучом для головок самонаведения ракет. Помимо узкого луча сопровождения цели, радар также генерировал широкий “референтный” луч для приема антенной ракеты. По одному радару полагалось на каждый из двух взводов батареи – таким образом, батарея могла сопровождать и обстреливать две цели одновременно. Передача и прием сигнала на HPIR были разделены по двум антеннам, что придавало радару характерную “ушастую” форму.

Радиолокатор ROR (англ. Range Only Radar – Радар (определяющий) Только Дальность) являлся как бы “дополнением” к остальным системам. Он предназначался для точного установления дистанции до цели, если та применяла радиопомехи или сбрасывала дипольные отражатели. Поскольку этот радар работал только по необходимости и только в проблесковом режиме, предполагалось, что системы радиоэлектронной защиты цели не успеют на него среагировать.

В составе каждой батареи имелись три командных фургона. Первый, ВСС (англ. Battery Control Central – Центральный Контроль Батареи) был центральным командным постом, где находились старшие офицеры и командир батареи. Поступающие с радаров данные о воздушной обстановке выводились на большой тактический дисплей: с помощью этих данных офицеры принимали решение, какие цели обстрелять, каким числом ракет, и как распределить их между взводами. BCC также осуществлял непосредственное управление первым взводом ракетной батареи.

Второй фургон, ICC (англ. Information Coordination Central – Центральная Координация Информации) представлял собой центр сбора и обработки информации с радаров. Он работал в паре с BCC, собирая и обрабатывая данные с радаров. В функции ICC входило сопоставление и обработка данных, идентификация целей, проверка запросов транспондеров “свой-чужой”, автоматическое сопровождение и распределение целей между установками. Де-факто, ICC работал как посредник между BCC и остальной батареей, собирая информацию о происходящем в воздухе, поставляя ее командиру батареи, и преобразуя его решения в команды исполнительной автоматике.

Третий фургон назывался PCP (англ. Platoon Command Post – Командный Пост Взвода). Он представлял собой отдельный командно-контрольный пост для второго взвода ракетной батареи. Функционально, PCP был аналогичен ICC, с тем отличием, что он имел собственный тактический дисплей, коммуникационную аппаратуру и автоматический вычислитель – т.е. мог осуществлять управление взводом самостоятельно. В случае необходимости (например, при боевых повреждениях), PCP мог взять на себя функции управления всей батареей.
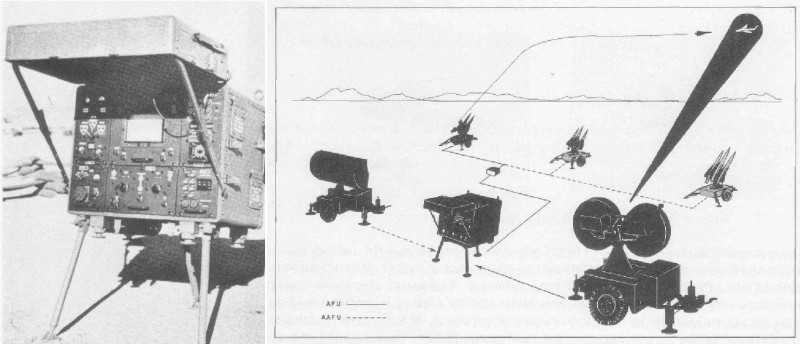
Еще одной деталью контрольной системы батареи была переносная консоль AFCC (англ. Assault Fire Command Console – Командная Консоль Штурмового Огня). Это был переносной терминал управления, способный обеспечить минимальный функционал HAWK в специфической ситуации – например, при высадке десанта. Консоль AFCC позволяла сформировать минимальное “огневое отделение” из одного радара HPIR, одной пусковой установки, и, собственно, управлявшей ими консоли. Радар HPIR в таком режиме использовался и для поиска цели (под контролем AFCC) и мог обеспечить противовоздушную оборону плацдарма без необходимости развертывать сразу целый взвод.

Трехзарядная пусковая установка M192 была смонтирована на стандартном шасси двухколесного трейлера. Ракеты размещались двумя ярусами на рельсовых направляющих: две бок-о-бок на нижнем ярусе, и третья над ними. Пусковая установка имела гидравлические приводы наведения по азимуту и углу места, и управлялась полностью дистанционно по командам BCC или PCP. Всего батарея включала шесть пусковых установок, по три в составе каждого взвода (т.е. по 9 постоянно готовых к пуску ракет на взвод – 18 на батарею).

Для перезарядки пусковых установок использовались три малогабаритных самоходных транспортно-заряжающих машины M-501. Эта маленькая гусеничная танкетка (перевозимая обычно в кузове грузовика) оснащенная гидравлической погрузочной стрелой, брала три ракеты HAWK с транспортной паллеты, доставляла их к пусковой установке, и проводила перезарядку сразу всех направляющих. Общий боекомплект батареи MIM-23 HAWK составлял 36 ракет – т.е. две полные перезарядки для всех пусковых установок. Также в состав батареи входили шесть мобильных генераторов и один бульдозер для окапывания.

Боевое применение HAWK выглядело следующим образом. Приближающаяся цель засекалась (в зависимости от высоты полета и расположения взводов батареи) радарами PAR или CWAR. Данные с этих радаров собирались фургоном ICC, обрабатывались, идентифицировались по сигналам “свой-чужой” и передавались в фургон BCC. Если второй взвод батареи развертывался отдельно, то для него обработку данных выполнял фургон PCP.
На основании полученных данных – при необходимости, уточняемых с помощью радара ROR — офицеры батареи принимали решение об открытии огня. Автоматика осуществляла непрерывное обновление данных о выбранных целях, рассчитывала точки перехвата, и определяла порядок, в каком они должны быть атакованы. Затем данные передавались на радары HPIR, которые брали первые по порядку цели на автоматическое сопровождение. Если помехи мешали точному стробированию цели HPIR, то в дело опять включался ROR, предоставлявший точные данные по дальности.
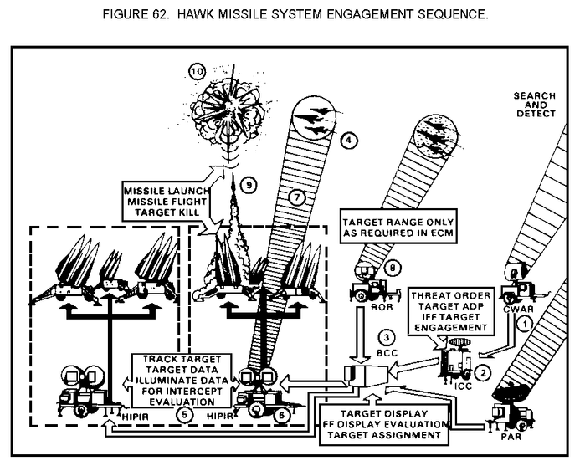
По команде с фургона BCC/PCP, пусковые установки взвода автоматически разворачивались на азимут и поднимали направляющие на угол, соответствующий азимуту и углу места для РЛС HPIR. Когда расчетная точка перехвата оказывалась в радиус досягаемости ракет – выбранная установка осуществляла запуск 1-3 ракет.
Запущенная ракета выполняла разгон при заданном угле подъема, после чего начинала наводиться на цель. В полете ракета принимала референтный сигнал широкого луча от радара HIPR и “эхо” узкого луча от цели: сопоставляя их, ракета точно идентифицировала сигнал от цели и фильтровала возможные помехи. Когда ракета и цель сближались на радиус поражения, ГСН ракеты инициировала подрыв боевой части. Результаты атаки оценивались РЛС HPIR по изменению параметров движения цели (либо ее фрагментации). В случае, если цель фрагментировалась и быстро теряла высоту и скорость – т.е. была поражена – HPIR автоматически переключался на новую цель и повторял цикл.
источник: https://fonzeppelin.livejournal.com/251573.html



