

История и устройство AIM-9 Sidewinder
Содержание:
Воспользовавшись выходным на 9-е мая реализовал давнюю идею: написал статью о ракете AIM-9 «Sidewinder». Постарался изложить, чем эта ракета была столь революционна в 50-ых, что ее срочно скопировали в СССР, и почему она остается на вооружении до сих пор (хотя, конечно, ее современные версии сильно отличаются от далекого предка…)
В конце 1940-ых, назревавший кризис авиационного вооружения стал уже очевидным. Наступившая эра реактивной авиации, с ее скоростями под 1000 км/ч со всей очевидностью сделала традиционные пушки и пулеметы недостаточно эффективным оружием.
Решением проблемы могли стать управляемые ракеты. Вскоре после окончания войны, ВМФ США инициировал разработку нескольких типов ракет «воздух-воздух» для вооружения палубных истребителей. В их список входили AAM-N-4 «Oriole» c активным радарным самонаведением, AAM-N-5 «Meteor» с полуактивным радарным самонаведением, AAM-N-6 «Sparrow» с наведением методом «оседланный луч» (позднее замененным полуактивным радарным).
Однако, все эти проекты, хотя и выглядели перспективно, отличались значительной сложностью и требовали много времени на разработку. Их поступление на вооружение в самом оптимистичном случае ожидалось не ранее середины 50-ых. А управляемое ракетное оружие американскому флоту требовалось уже сейчас. Нужно было некое простое решение.
В 1946 году, военно-морской испытательный полигон Чина Лэйк (Калифорния) начал разработку очень простой самонаводящейся ракеты «воздух-воздух». По сути, инженеры хотели просто нацепить инфракрасную головку самонаведения и простенький блок управления на обычный 127-мм (5 дюймов) НУРС «Zuni», и получить тем самым дешевую и неприхотливую УРВВ для палубных истребителей.
Изначально, программа даже не была официальной. Это была частная инициатива работавшего в Чина Лэйк физика Уильяма Бердетта МакЛена, опиравшаяся на усилия добровольцев, и финансировавшаяся в рамках программы разработки неконтактных взрывателей под обозначением «Local Fuze Project 602». Обозначение «Сайдуиндер» (англ. Sidewinder), в честь рогатой гадюки — известной своей способностью замечать тепловое излучение добычи — ракета получила, когда наработки по проекту представили адмиралам. Адмиралы проект оценили: новая ракета выглядела простым, дешевым и реалистичным решением.
В 1951 году, проект «Сайдуиндер» получил официальное финансирование. Первый запуск состоялся в сентябре 1952, а первый успешный перехват учебной цели — радиоуправляемого самолета-мишени — состоялся 11 сентября 1952 года. В 1955 году ракета поступила в серийное производство, а в 1956 официально поступила на вооружение.
ОПИСАНИЕ
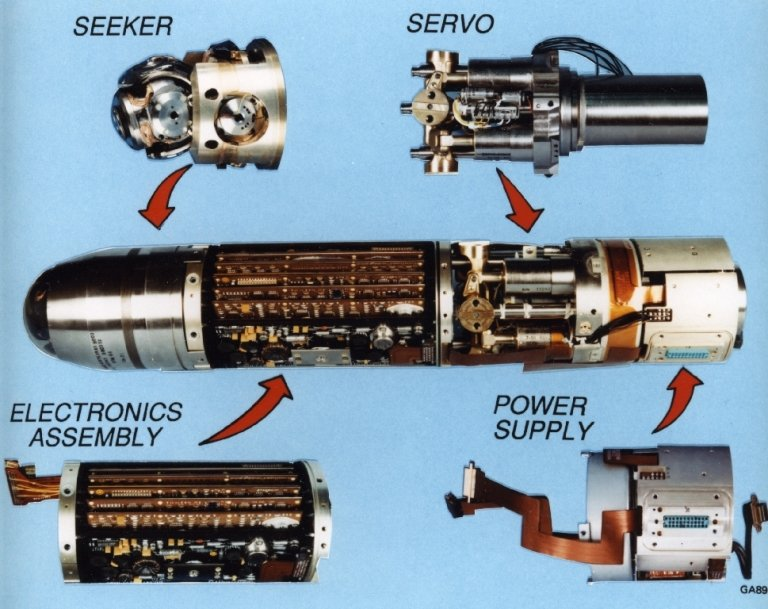
По конструкции, «Сайдуиндер» значительно отличался от современных ему проектов управляемых ракет «воздух-воздух» своей простотой… и элегантностью. По сути дела, ракета состояла из последовательно соединенных самодостаточных блоков: головки самонаведения и модуля управления с аэродинамическими рулями, боевой части с контактным и неконтактным взрывателем, твердотопливного ракетного двигателя, и прицепленных сзади стабилизаторов с механизмом стабилизации по крену.
Значительной проблемой ранних самонаводящихся ракет было непрерывное сопровождение цели. Головка самонаведения ракеты стремилась удерживать цель в центре поля зрения (равносигнальную зону, где поступающий от цели сигнал был одинаковым). Если цель смещалась, головка самонаведения регистрировала новое положение цели, и автоматика поворачивала ракету так, чтобы вернуть цель в центр поля зрения. Проблема была в том, что для этого необходимо было дергать всю массивную ракету целиком — из-за чего головка самонаведения постоянно запаздывала с «ведением» цели.
Инженеры Чина Лэйк предложили оригинальное решение: разделить сопровождение цели и управление ракетой:
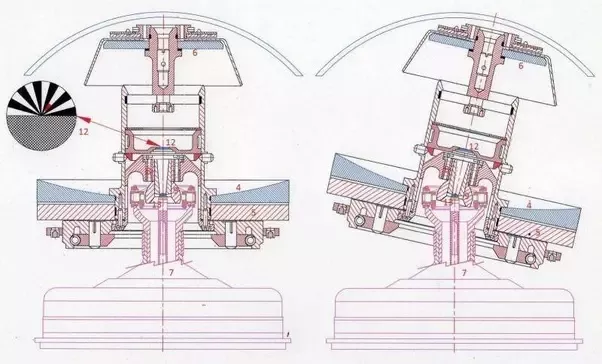
Инфракрасная головка самонаведения «Сайдуиндер» была установлена на гироскопически стабилизированном карданном подвесе, и могла свободно двигаться в пределах угла в 25 градусов от продольной оси ракеты. Сканируя инфракрасное излучение цели, головка самонаведения проворачивалась при помощи электромоторов таким образом, чтобы постоянно удерживать цель точно в центре своей оптической оси. Если цель смещалась — головка самонаведения поворачивалась за ней.
«Однажды я вошел в комнату с горящей сигаретой, и, проходя, заметил краем глаза какое-то движение. «Сайдуиндер» на стенде повернул линзу и следил за огоньком в моей руке»
(с, Уолтер Чирра)
Система управления ракеты получала представление о местонахождении цели, отслеживая углы расхождения между оптической осью ГСН, и продольной осью тела ракеты. Эти углы должны были быть постоянными. Для выполнения перехвата, «Сайдуиндер» использовал метод сближения при постоянном угле визирования цели:
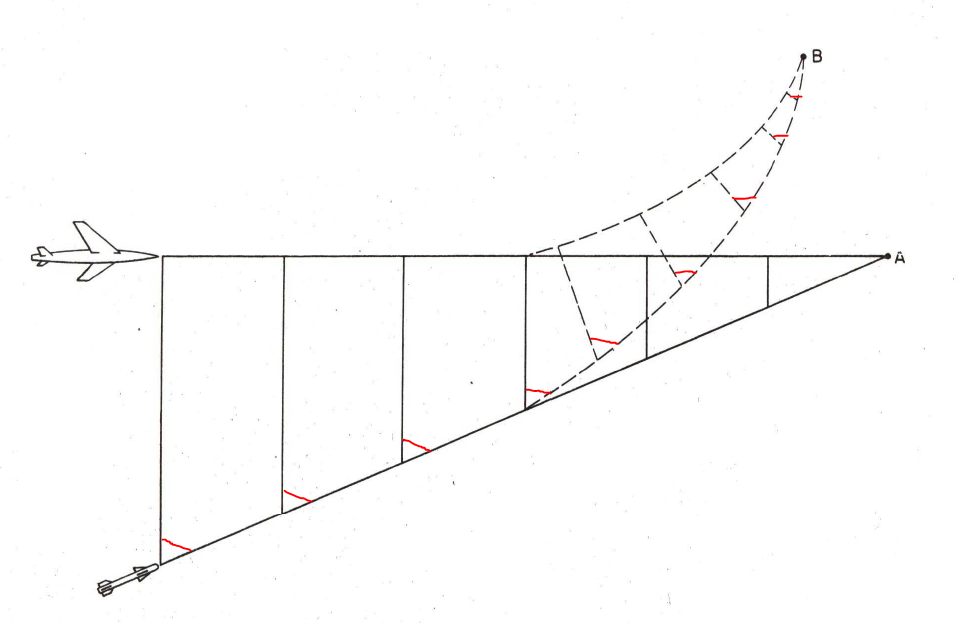
Иными словами, система управления ракеты следила за тем, чтобы угол между оптической осью ГСН и продольной осью тела ракеты был постоянным. Пока угол визирования цели оставался постоянным, система управления не реагировала. Если угол визирования цели менялся — увеличивался или уменьшался — система управления поворачивала ракету так, чтобы вернуть его к прежнему значению. Таким образом ракета не «преследовала» цель, но «вела» ее, двигаясь в точку упреждения.
Отслеживание цели «Сайдуиндер» вел классическим методом конического сканирования: поле зрения головки самонаведения непрерывно вращалось по кругу, сканируя пространство и реагируя в тот момент, когда в поле зрения оказывалась цель. Однако реализация метода была весьма оригинальной.
В головке самонаведения «Сайдуиндера» между фокусирующей системой и ИК-сенсором располагался прозрачный диск с нанесенным на него определенным узором. Вращаясь (вместе с фокусирующей системой) перед ИК-сенсором, узор на диске рассекал поток излучения на части, тем самым выполняя сканирование оптического сигнала.
Судя по всему, решение со сканирующим диском было «трофейным». Американцы «позаимствовали» его из экспериментальных немецких инфракрасных головок самонаведения «Гамбург» и «Мадрид», разработанных в конце Второй Мировой Войны для противокорабельных планирующих бомб. Хотя немцы, в целом, в электронике были довольно-таки безнадежны, нельзя не признать, что конкретно это решение со сканирующим диском было весьма изящным!
Общий принцип работы сканирующего диска был следующим:
Верхняя (условно; диск вращался) часть была разделена на прозрачные и непрозрачные сектора. Нижняя часть была непрозрачной — или если быть совсем точным, то она была полупрозрачной, с коэффициентом прохождения равным суммарному коэффициенту прохождения с верхней части.
Этот узор, вращаясь, решал для головки самонаведения одновременно три задачи:
* Определение направления на цель
* Выделение сигнала цели на общем фоне
* Определение величины отклонения цели от оптической оси
Разберем эти три задачи детально:
* ОПРЕДЕЛЕНИЕ НАПРАВЛЕНИЯ НА ЦЕЛЬ — было критически важным для системы наведения. Чтобы ракета знала, в какую сторону поворачивать на цель, она должна была знать, где именно цель находится. Эта задача решалась особым рисунком на сканирующем диске.
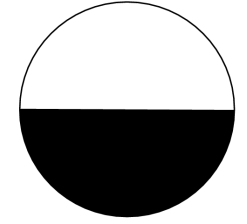
Для этого, сканирующий диск был разделен на две половины: прозрачную и непрозрачную (полупрозрачную). Вращаясь, диск то блокировал, то открывал для ИК-сенсора поток теплового излучения от цели:
Если цель находилась точно на оптической оси головки самонаведения, то сигнал от нее шел непрерывно. Если же цель смещалась в сторону, то сигнал от нее то появлялся, то исчезал — по мере того, как непрозрачная половина диска то затеняла, то открывала цель.
От системы наведения всего лишь требовалось отмечать, при каком положении диска сигнал появился, а при каком исчез, чтобы получить направление на цель. Каждый оборот диска синхронизировался с электронным таймером — генератором временной базы — генерирующим опорный сигнал продолжительностью в один оборот, так что любому положению диска соответствовало определенное значение опорного сигнала. Сравнивая опорный сигнал с сигналом от цели, система устанавливала угловое направление, в котором следует повернуть головку самонаведения.
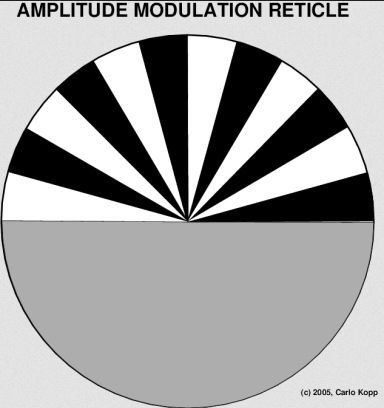
* ВЫДЕЛЕНИЕ СИГНАЛА ЦЕЛИ НА ОБЩЕМ ФОНЕ — инфракрасное излучение двигателя самолета не единственный источник инфракрасного сигнала в небе. Облака, отражающие солнечный свет, тепловое излучение с поверхности Земли, постоянно создают инфракрасный фон, который также воспринимается чувствительным инфракрасным сенсором. Возникает противоречие: чтобы эффективно отслеживать цель, нам нужен максимально чувствительный ИК-сенсор, но такой сенсор будет воспринимать слишком много фонового излучения, чтобы эффективно отслеживать цель.
Решение проблемы было в формулировке инфракрасного сигнала от цели как точечного источника. Прозрачная половина сканирующего диска была разделена на чередующиеся прозрачные и непрозрачные сектора (т.н. «узор восходящего солнца»):
Вращаясь, непрозрачные сектора рассекали поле зрения ИК-сенсора на полосы. При этом фоновой (не-точечный) источник инфракрасного излучения — например, отражающие солнечный свет облака — не мог быть полностью затенен непрозрачными секторами. Сигнал от него поступал на ИК-сенсор непрерывно и равномерно в течение всего периода вращения.
Разница в сигнале от облака (слева) и самолета (справа)
Точечный же источник инфракрасного излучения (например, самолет) то затенялся непрозрачными секторами, то становился вновь видимым сквозь прозрачные. Сигнал от него на ИК-сенсоре непрерывно пульсировал в такт вращению сканирующего диска, то нарастая, то снижаясь до нуля. С помощью узкополосного амплитудного фильтра, пульсирующий сигнал цели отделялся от стабильного фонового сигнала.
* ОПРЕДЕЛЕНИЕ ВЕЛИЧИНЫ ОТКЛОНЕНИЯ ЦЕЛИ ОТ ОПТИЧЕСКОЙ ОСИ — для пропорционального наведения ракеты, необходимо знать не только направление на цель, но и величину, на которую ракете необходимо довернуть в сторону цели.
Многие ранние виды управляемого оружия (как и некоторые современные), использовали простое наведение «все или ничего», при котором рули отклонялись сразу до предела, и ракета поворачивала в сторону цели до тех пор, пока цель не оказывалась прямо по курсу. После чего рули возвращались в нейтральное положение. Хотя такое наведение и было простым в реализации, оно не особенно подходило для поражения малоразмерных маневрирующих целей. Перекидывая рули из нейтрального сразу в максимальное положение, ракета не могла выполнять тонкие коррекции курса: в результате, ее курс напоминал зигзаг.
Для наведения «Сайдуиндер» на воздушную цель, требовалась существенно большая точность коррекций курса. Ракета должна была представлять не только в какую сторону повернуть, но и насколько именно. Эта задача решалась также с помощью вращающегося диска: по магнитуде сигнала от цели.
Прозрачные сектора диска, разумеется, расширялись от центра к краю. Поскольку цель, хотя и рассматривалась как точечный источник излучения, но все же на самом деле им не являлась — чем дальше от центра находилась цель, тем больше излучения от нее попадало на ИК-сенсор через каждый прозрачный сектор. Таким образом, по магнитуде сигнала от цели можно было определить, насколько она отклонилась от оптической оси ГСН. И, соответственно — насколько надо довернуть, чтобы цель вновь оказалась точно в центре поля зрения.
Более поздние модели «Сайдвиндера» использовали иной принцип — измерение частоты пульсаций сигнала от цели. Для этого сектора диска были разделены на множество чередующихся прозрачных и непрозрачных полосок в шахматном порядке. Полоски были подобраны таким образом, чтобы частота пульсаций сигнала возрастала по мере удаления от центра диска. Таким образом, измеряя частоту пульсаций сигнала, ракета могла с высокой точностью установить величину отклонения цели.
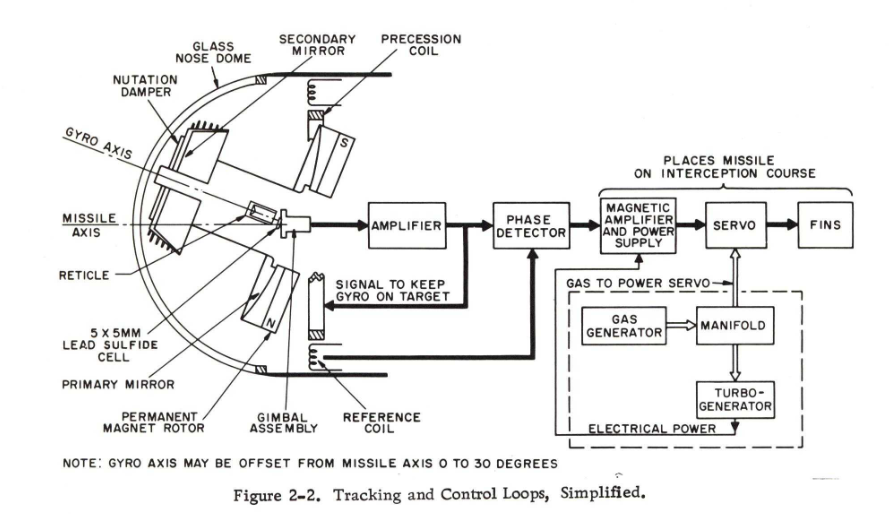
Приемным устройством являлся полупроводниковый фотоэлемент на сульфиде свинца (PbS, также известный как галенит). Система зеркал — главного собирающего и вторичного перенаправляющего — фокусировала поступающее тепловое излучение на 5х5 мм фотоэлементе, находившемся сразу за сканирующим диском.
Поскольку ИК-сенсор на ранних моделях не охлаждался, чувствительность его была довольно низкой. Последующие модели «Сайдуиндер» решали проблему либо за счет термоэлектрического охлаждения, либо за счет банального сосуда с жидким азотом, охлаждающего ракету перед пуском.
В полете ракета управлялась при помощи носового Х-образного оперения (схема «утка»). Носовые плоскости ракеты поворачивались для выполнения маневров по тангажу и рысканью. При этом для привода рулей было выбрано необычное решение: система сервоприводов была пневматической, с питанием от порохового газогенератора. Который заодно использовался и для привода турбины динамо, снабжавшего энергией электросистему ракеты (динамо генерировало до 50 ватт, что примерно втрое превосходило потребность).
Система управления ракеты контролировала рули с помощью соленоидных клапанов, регулировавших течение горячих газов из генератора в парные цилиндры приводов рулей. Пока ракета двигалась прямо, давление в каждой паре цилиндров было одинаково, и рули оставались в покое. Если же возникала необходимость совершить маневр, клапаны повышали давление в одном цилиндре, и понижали в противоположном. Равновесие нарушалось и рули проворачивались.
Время работы газогенератора составляло 20 секунд. Вскоре после выгорания пороховой шашки, давление в сервосистеме падало, динамо переставало вырабатывать ток, и ракета теряла управляемость.
Оригинально была решена проблема обратной связи в контуре управления: она осуществлялась по шарнирному моменту рулей. Рули двигались, до тех пор пока существовала разница между моментами, созданными аэродинамическими силами и рулевыми машинами. Когда эти моменты выравнивались, движение рулей немедленно останавливалось. По мере падения скоростного напора отклонение рулей увеличивалось, но аэродинамическая сила, а следовательно — и поперечная перегрузка оставались примерно постоянными. Таким изящным способом создателям ракеты удалось обойтись без сложной аппаратуры обратной связи.
Большой проблемой для разработчиков «Сайдуиндер» была ее стабилизация по крену. Узкий цилиндрический корпус с Х-образным оперением имел вполне естественную тенденцию легко проворачиваться вокруг продольной оси. Стабилизация обычным методом — то есть гироскопическим автопилотом, управляющим с помощью сервоприводов элеронами на крыльях — не подходила в первую очередь, по массогабаритным характеристикам. Мало того, что автопилот значительно увеличил бы вес ракеты; существующие в 50-ых гироскопы нужной эффективности попросту не влезали в узкий 12-сантиметровый фюзеляж.
В поисках решения, инженеры Чина Лэйк пришли к потрясающе изящному в своей простоте концепту: роллеронам.
Для стабилизации по крену, на хвостовом оперении ракеты были смонтированы небольшие подвижные плоскости. В каждую из них был встроен вращающийся диск с насечками по окружности, направленными против направления полета. И этим система и ограничивалась.
Когда ракета запускалась, набегающий поток воздуха давил на насечку и раскручивал диски роллеронов до сотен оборотов в минуту. В результате каждый роллерон начинал работать как миниатюрный гироскоп, стремящийся удержать себя (и плоскость, в которую встроен) в стабильном положении.
Если корпус ракеты проворачивался по крену — возникала прецессия, и роллерон отклонял плоскость, поднимая или опуская ее в зависимости от направления поворота. В результате этого, происходило несимметричное изменение подъемной силы на хвостовом оперении: возникающий вращающий момент был направлен против крена ракеты, тем самым стабилизируя ее по продольной оси.
Эта невероятно простая и изящная система позволила стабилизировать ракету по крену не прибегая к сложному (и массивному!) гироскопическому автопилоту и системе сервоприводов, управляющих традиционными элеронами.
Боевая часть ракеты располагалась между блоком управления и двигателем. Это была осколочно-фугасная боевая часть весом около 11 кг (25 фунтов), из которых примерно 4,7 кг (10,5 фунтов) приходилось на взрывчатку. При детонации, боевая часть порождала около 1300 осколков, разлетавшихся на скорости до 1800 м/с (6000 футов в секунду) и способных пробить сантиметровой толщины стальную плиту на дистанции до 10 метров (30 футов).
Боевая часть оснащалась двумя электронными взрывателями: контактным ударным и неконтактным инфракрасным. При прямом попадании в самолет противника, срабатывал контактный взрыватель Mk 304, установленный в переднем торце боеголовки. В нем использовался пьезоэлектрический кристалл, который от сотрясения (при прямом попадании ракеты в цель) деформировался, создавая напряжение, замыкающее электрическую цепь. Подрыв боеголовки в этом случае следовал немедленно.
Следует отметить, однако, что контактный взрыватель поначалу не отличался надежностью, и именно его провал стал непосредственной причиной появления советской копии AIM-9B — ракеты К-13)
Если же ракета промахивалась, но проходила достаточно близко к цели, то срабатывал неконтактный инфракрасный взрыватель Mk 303. Расположенный позади боевой части, взрыватель «смотрел» через ряд окошек под прямым углом к направлению полета ракеты.

Когда цель оказывалась сбоку от ракеты в пределах дистанции в 9-10 метров (30 футов), инфракрасный детектор взрывателя регистрировал резкий скачок интенсивности излучения — и затем столь же резкое его падение. Именное это резкое падение интенсивности излучения и приводило в действие взрыватель. Если цель пролетала слишком далеко, чтобы поразить ее, то подъем и снижение интенсивности излучения шли более плавно, и взрыватель не реагировал.
Оба взрывателя взводились электрически, питались от собственных батарей, и имели механическую систему безопасности, препятствующую взведению взрывателей до тех пор, пока ракета оставалась на направляющей.
ЗАКЛЮЧЕНИЕ
Ракета «Сайдуиндер» была воплощенной революцией в тактике воздушного боя. Это было первое оружие «воздух-воздух» действительно способное действовать по принципу «выстрелил-и-забыл». После запуска ракеты, она наводилась на цель абсолютно самостоятельно, не требуя никакого участия самолета-носителя.
Для середины 50-ых, когда «Сайдуиндер» поступил на вооружение, это был радикальный прорыв в возможностях. Современные ей ракеты — вроде американской GAR «Falcon», британской «Fairey Fireflash» или советской К-5 — использовали куда менее удобное наведение. «Fairey Fireflash» и К-5 наводились методом «оседланный луч»: двигались вдоль узкого луча радарного прицела к цели, и требовали, чтобы пилот непрерывно удерживал цель в перекрестье прицела. Ракета GAR «Falcon» от ВВС США использовала полуактивное радарное наведение: ракета наводилась на отраженный от цели сигнал бортовой РЛС, что вынуждало непрерывно поддерживать с целью радарный контакт. По сути дела, все эти образцы ранних УРВВ можно было использовать только для перехвата тяжелых бомбардировщиков. И то не всегда.
«Сайдуиндер» же был первой ракетой, которая реально могла использоваться в маневренном воздушном бою истребителей. Конечно, ее первые образцы были далеко не оптимальны для такого: скорость сканирования ГСН была невелика, захват цели на сопровождение — далеко не мгновенным, что требовало от пилота несколько секунд удерживать цель в перекрестье прицела. Но другие ракеты того времени были вообще непригодны для маневренного боя. И возможность поразить истребитель неприятеля с большой дистанции, «посадить» ему на хвост ракету на выходе из виража, была фактором, менявшим «абсолюты» тактики воздушного боя.
Другим критическим фактором стала универсальность «Сайдуиндер». Современные ей ракеты могли применяться только со специализированных перехватчиков, оснащенных особой конструкции прицелами и радарами. «Сайдуиндер» же мог запускаться с любого самолета, оснащенного наружными бомбовыми подвесками. Вся модернизация для превращения истребителя или штурмовика в ракетоносец, сводилась к установке в кабине пилота маленькой контрольной панели с четырьмя кнопками и четырьмя световыми индикаторами, и выводе от нее пучка проводов к наружным подвескам.
Лучшей рекомендацией к достоинствам «Сайдуиндер» является тот факт, что эту ракету детально скопировали в СССР. После Второго Тайваньского Кризиса (конфликта между КНР и Тайванем в 1958), в распоряжении советских военных оказались несколько ракет этого типа, с помощью которых тайваньские F-86 «Сэйбр» успешно нивелировали преимущество китайских Миг-17 в скорости и вооружении. По крайней мере в одном случае «помог» сбой контактного взрывателя: выпущенная ракета попала в Миг-17, но не взорвалась, а застряла, и отправилась вместе с ним на китайский аэродром.
Примененные в «Сайдвиндер» решения восхитили советских инженеров и ужаснули генералов. На тот момент у СССР не было ничего подобного ни на вооружении, ни даже в разработке. Советским генералам в кошмарных снах мерещилось, как армады ракетоносных истребителей НАТО играючи сбивают пушечно-пулеметные Миг’и. Ответ требовался действительно срочно, и он был найден: советские инженеры тщательнейшим образом изучили трофейные образцы, и в точности их воспроизвели. Советский «нелицензионный» «Сайдуиндер» поступил на вооружение под обозначением К-13/Р-13 в 1962 году, и около десятилетия оставался наиболее популярным вооружением фронтовой авиации СССР.

Техническое совершенство, изящество решений и простота конструкции обеспечили «Сайдуиндер» долгую и славную историю. Ракеты этого семейства — равно как и побочных линий, созданных под впечатлением от «Сайдуиндера» — состоят на вооружении до сих пор, непрерывно совершенствуясь и модифицируясь. Во множестве локальных конфликтов конца XX — начала XXI столетия, «Сайдуиндер» зарекомендовал себя надежным, неприхотливым и эффективным оружием. Он пережил абсолютно все разрабатывавшиеся параллельно с ним ракеты «воздух-воздух», оставаясь на вооружении после того, как его конкуренты и оппоненты давно отправились в музеи. Неплохая судьба для ракеты, замышлявшейся как «временное, импровизированное решение»?…
источник: https://fonzeppelin.livejournal.com/222594.html



