История беспилотников

История беспилотников: как управляли техникой на расстоянии в начале XX века
Хорошо делать беспилотники в наше время! К вашим услугам всегда умные компьютеры, которые берут на себя задачи управления. Ну а как быть, если вы живёте в начале XX века и первый компьютер изобретут ещё нескоро? Не повод отчаиваться — технология наших предков могла справиться и не с таким.
Содержание:
Заря радиосвязи
Допустим, мы хотим научить некую машину исполнять четыре команды: «вправо», «влево», «вверх» и «вниз». Выделять по отдельной частоте под каждую команду нам, понятное дело, не очень-то хочется: это сильно усложнит конструкцию. Попробуем обойтись одной.
Простейший способ, доступный буквально на самой заре радиосвязи (в 1890-х), — это задавать команды числом импульсов. Например, один импульс — команда «вправо». Два подряд — команда «влево». Три — «вверх», и четыре — «вниз». Сколько мы импульсов передадим — такая команда и будет выполняться. Уж посчитать количество импульсов автоматы умели давным‑давно.
Система шагового искателя
Для ввода команд обычно использовался наборный диск — как на старых телефонных аппаратах, — соединённый с ключом радиопередатчика. Оператор прокручивал диск на нужную цифру, и простенький пружинный механизм отбивал в эфир соответствующее ей число импульсов. Если оператор набирал цифру «два», то два импульса и отсылалось.
На борту беспилотного аппарата радиоприёмник соединялся с шаговым искателем: электромеханическим устройством, которое последовательно (шагами) переключалось между рядом контактов. Каждый принятый в эфире импульс перемещал искатель на шаг вперед. Если, как в нашем примере, отправлено было два импульса, то искатель смещался вперед на два шага и замыкал второй по очереди контакт. От этого ток подавался на исполнительные механизмы, которые и выполняли приказ: например, поворачивали руль. В нашем сценарии была передана команда «влево», так что руль повернулся влево.
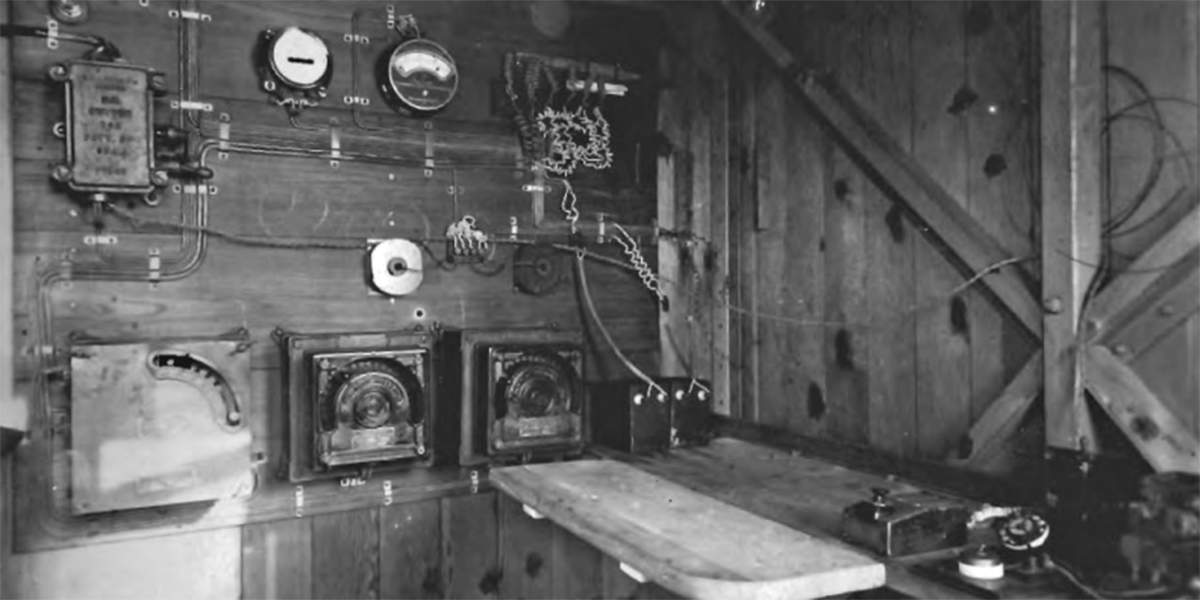
Контрольная станция корабля-мишени «Агамемнон». Справа виден телефонный наборный диск — именно им отдавали приказы огромному роботу
Таким нехитрым способом можно с одного наборного диска задать девять команд (от 1 до 9).
Ну а если этого мало? Ничто не мешает поставить пару шаговых искателей и автоматический переключатель, который после ввода команды на первом искателе переключит приёмник на второй. Тогда первая введённая оператором цифра будет задавать позицию на первом искателе, вторая — на втором… и так, пока не надоест.

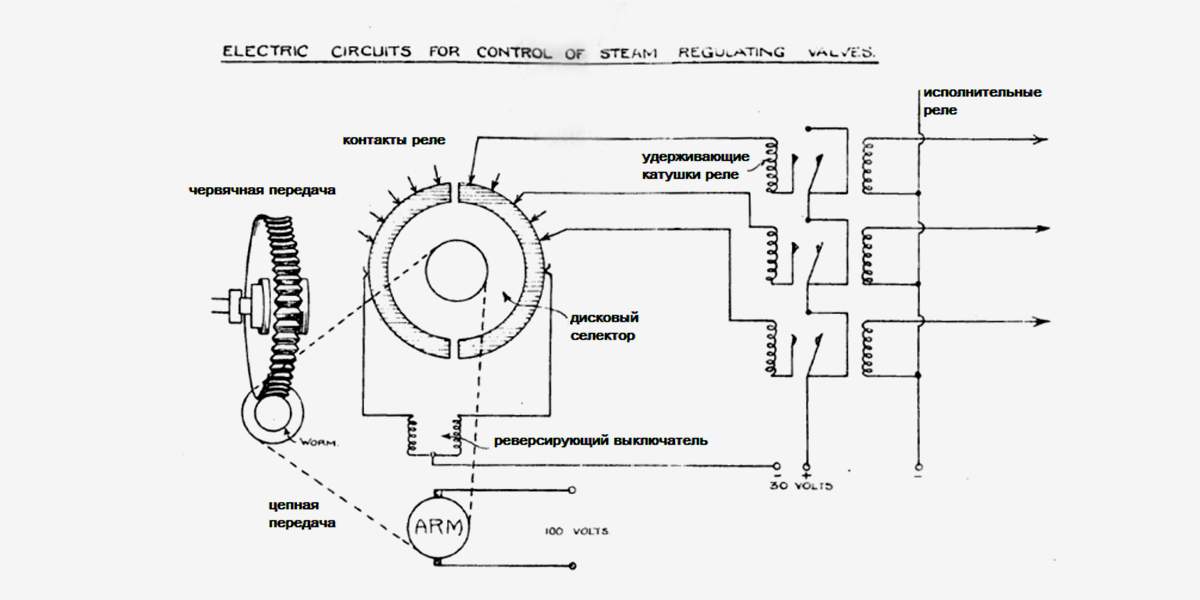
Корабль-мишень «Агамемнон»
Именно таким образом управлялся британский корабль-мишень «Агамемнон», перестроенный в 1920-е годы из старого броненосца. Он мог выполнять 99 различных команд, заданных двузначными комбинациями от 1-0 и до 9-9. Коды с 1-0 по 3-6 определяли курс огромного робота, коды с 5-0 по 9-9 задавали скорость, а набор команд с 3-7 по 4-9 использовался для вспомогательных функций: включения и выключения бортовых огней, постановки дымовых завес и так далее.
«Центурион» на дистанционном управлении
Главный недостаток такого подхода — его неторопливость.
Скорость реакции системы зависит от множества чисто механических процессов. Для управления, скажем, самолётом, такая система довольно неудобна. Поэтому её обычно использовали для контроля беспилотных кораблей, торпед и подобной техники, где моментальная реакция не требовалась. Или же брали такую систему как вспомогательную, в комбинации с другими методами: например, для установки нужной скорости или высоты полёта.
Другой недостаток — это чувствительность системы к помехам. Неприятелю достаточно найти нужную частоту и передать на ней ложный импульс, чтобы сбить систему с толку. Научить же её различать импульсы и отличать настоящий от ложного, довольно непросто.
Поэтому в 1910-е годы придумали другое простое решение: фазово-импульсную модуляцию, или в дословном переводе с английского «модуляцию положением импульса» (Pulse Position Modulation).
Интервальная работа
В чём суть идеи? В том, что работа системы управления разделяется по времени на отдельные циклы — обычно по секунде каждый — и каждый такой цикл делится на отдельные интервалы. Команда задаётся конкретным интервалом, в который был отправлен и принят радиоимпульс.
Допустим, мы хотим закодировать всё те же четыре команды управления. Мы устанавливаем промежуток с 0,00 (начало цикла) секунды и до 0,25 секунды для команды «вправо»; 0,26-0,50 секунды — для команды «влево»; 0,51-0,75 секунды — для команды «вверх»; и 0,76-1,00 — для команды «вниз». Передатчик на станции управления и приёмник на борту беспилотника тщательно синхронизируются — так, чтобы их циклы в точности совпадали.
На станции управления очень точный таймер последовательно подсоединяет радиопередатчик к кнопкам управления. Когда оператор нажимает, скажем, кнопку «влево», он подает ток на соответствующий контакт — и когда стрелка таймера достигает этого контакта ровно в 0,26-0,50 секунды от начала цикла, передатчик транслирует в эфир короткий импульс.
На борту беспилотника происходит обратный процесс — таймер последовательно соединяет радиоприёмник с исполнительными реле. В момент 0,26-0,50 секунды от начала цикла приемник соединяется с реле, которое отвечает за команду «влево». И если точно в этот момент придёт сигнал, то реле замкнётся и исполнительные механизмы начнут выполнять команду «влево».
Такая система реагирует намного быстрее шагового искателя.
К тому же можно передавать и несколько команд одновременно — например, «вправо» и «вверх». И к помехам такая система тоже довольно устойчива — если сделать интервалы приёма очень короткими, а между ними оставить длинные пустые паузы, то неприятель ни за что не догадается, когда же именно посылать ложные импульсы.
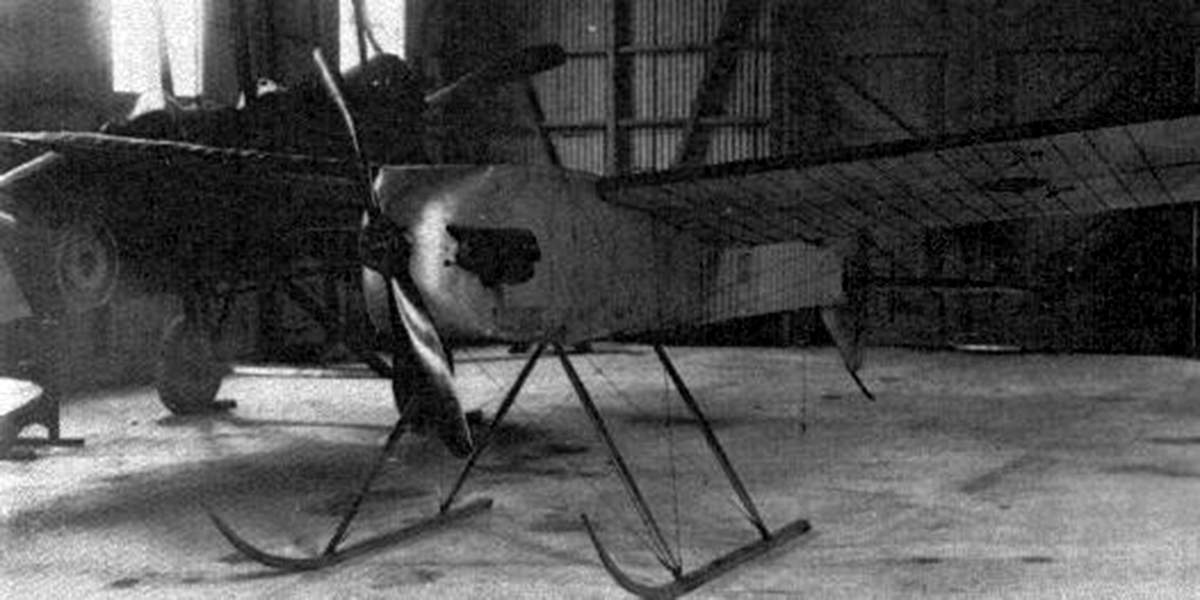
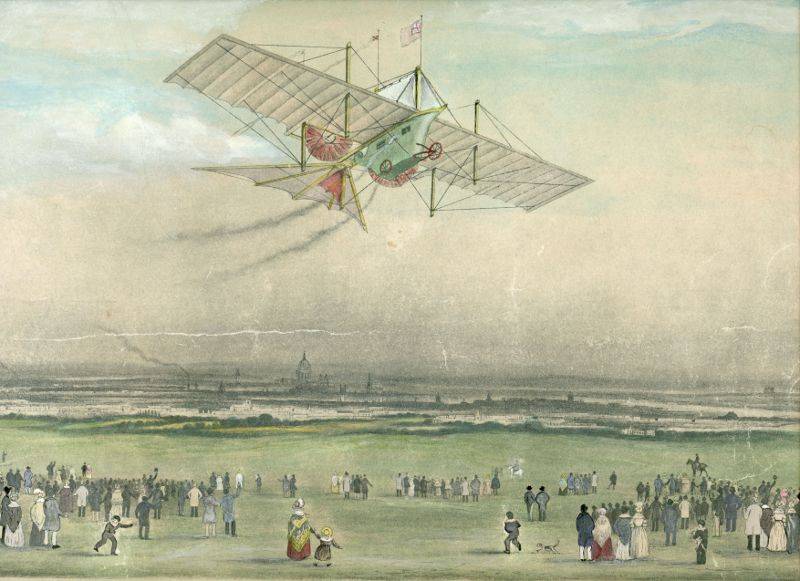
«Воздушная мишень» Арчибальда Лоу, первый в мире радиоуправляемый самолётик
По такому принципу управлялся самый первый радиоуправляемый самолёт в мире — Aerial Target Арчибальда Лоу, созданный в 1917 году. Для конспирации его называли «мишенью», но, согласно концепции, это должна была быть летающая зенитная торпеда, способная догонять в воздухе и подрывать немецкие цеппелины.
Главный недостаток такого подхода — необходимость очень точной синхронизации. Если циклы работы передатчика и приёмника хоть немного разойдутся друг с другом, то дело плохо. Команды перестанут поступать в отведённые им интервалы, исполнительные механизмы начнут их путать.
Оператор, допустим, передаёт команду «вправо» — но на беспилотнике приёмник чуть-чуть запаздывает и импульс приходится на интервал, отведённый для команды «вниз». Результат немного предсказуем…
Мы разобрали две самые простые системы, доступные для использования буквально с самой зари радиотехники. Не очень устраивают? Тогда придётся подождать — недолго! — звукового радио, появившегося уже в 1910-е годы.
Звук по радио
Если можно передать по радио не просто импульс, а сложный звуковой сигнал, то можно и задавать команды акустическими тонами. Надо только, чтобы приёмник параллельно подавал сигнал на несколько узкополосных фильтров, каждый из которых настроен на пропуск лишь определённого тона. Тогда этот нужный тон пройдёт соответствующий ему фильтр и активирует исполнительное реле.
Попробуем закодировать наши четыре команды акустическими тональностями. Для команды «вправо» установим тон в 250 Гц. Для команды «влево» — 500 Гц. Для команды «вверх» — 750 Гц, а для команды «вниз» — 1000 Гц.
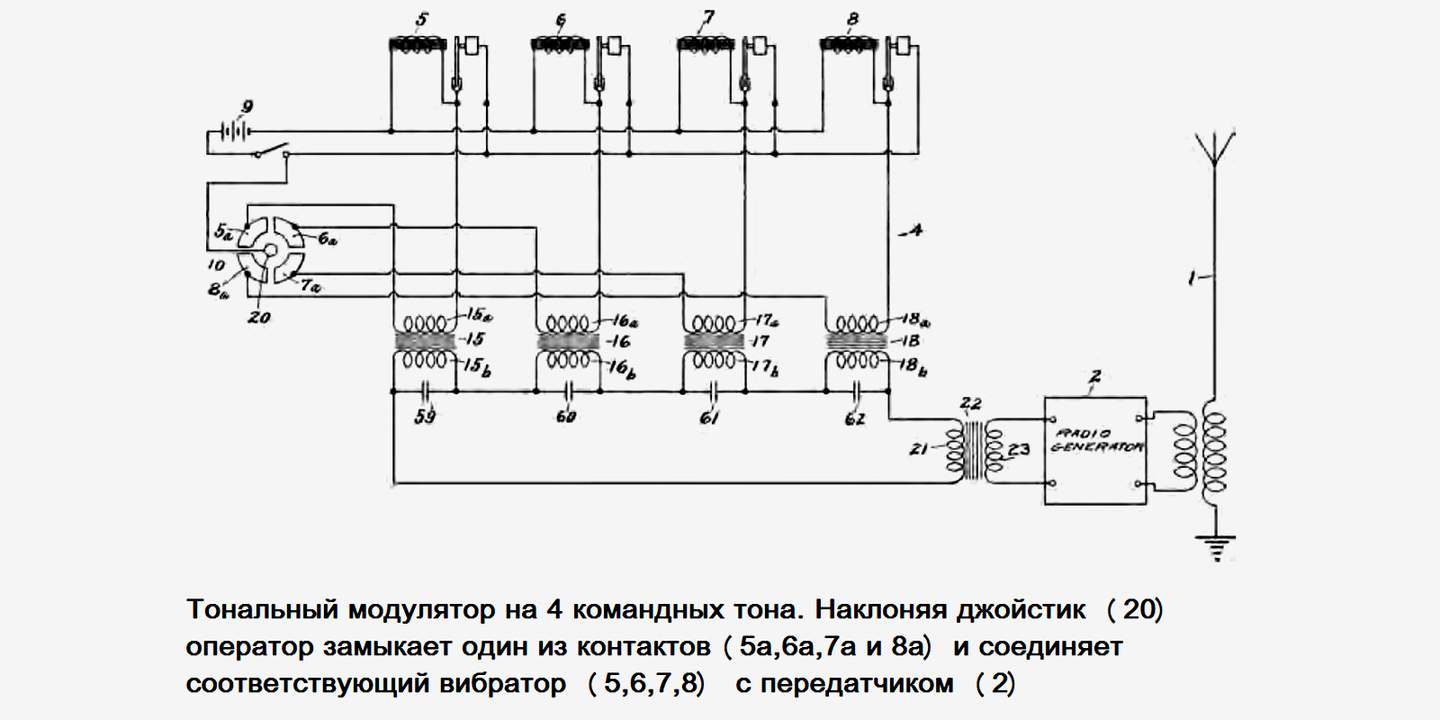
Устройство модулятора на четыре команды
Наше кодирующее устройство (модулятор) представляет собой систему из четырёх электронных вибраторов, каждый из которых генерирует соответствующую тональность. С помощью кнопок управления или джойстика мы подключаем один из вибраторов к передатчику, направляя выбранную тональность в эфир на несущей частоте. Допустим, мы передаём тональность 500 Гц — команда «влево».
Вот так, к примеру, испытывали беспилотник на тональном управлении.
На борту беспилотника приёмник распараллеливает полученный сигнал между четырьмя акустическими фильтрами. Каждый из фильтров настроен распознавать только определённый тон, а остальные — игнорировать. Поступающий сигнал в 500 Гц игнорируется фильтрами «вправо», «вверх» и «вниз», но проходит фильтр «влево». На выходе из этого фильтра появляется напряжение, которое замыкает исполнительное реле, отвечающее за команду «влево».
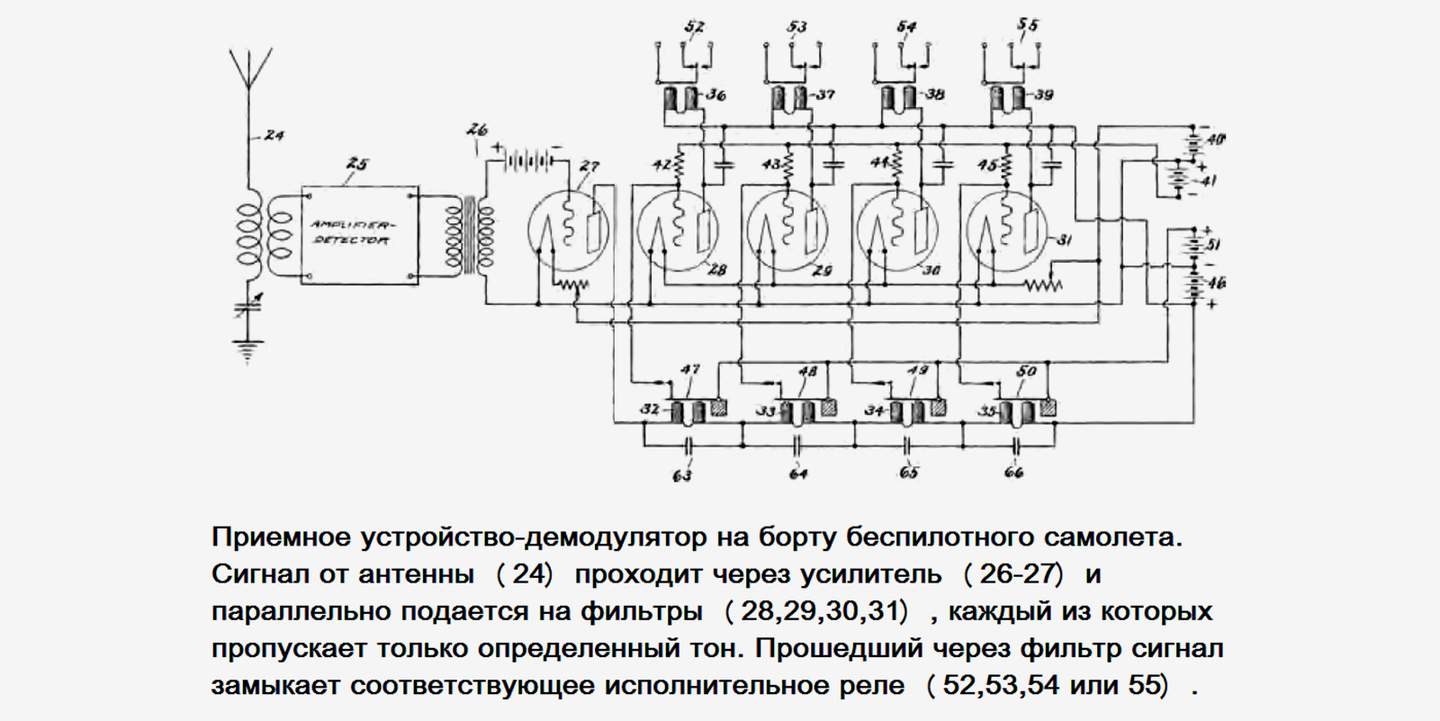
Устройство демодулятора на четыре команды
Достоинство такого метода — надёжность и скорость реакции. Команда исполняется всё время, пока передаётся соответствующий тон, а как только он прекращается — сразу прерывается. Управление становится чувствительным и эффективным.
Для защиты от помех инженеры использовали разные решения. Посылали, например, на несущей частоте ничего не кодирующий, но очень мощный сигнал — чтобы попросту «забить» все попытки неприятеля вклиниться в канал управления. Или вводили очень короткий идентификационный сигнал, настраиваемый индивидуально для каждого беспилотника. Такой сигнал передавался в начале команды, и, только правильно его распознав (с помощью дополнительного фильтра), исполнительная система начинала реагировать и на само указание.
В этом случае, неприятель, даже найдя правильную несущую частоту, не сможет передавать ложные команды: он ведь не знает, какой именно идентификационный сигнал нужно использовать!
Часто использовалось комбинирование нескольких принципов управления. Например, американский флот для управления ударными беспилотниками TDR в годы Второй мировой использовал комбинацию тонального модулирования и программирования команд числом импульсов. Тональное модулирование использовалось для команд «вверх», «вниз», «вправо» и «влево» — где требовалась высокая скорость реакции — а для управления скоростью и высотой полёта (задаваемой для радарного альтиметра) использовалась последовательность импульсов с наборного диска.

Беспилотные самолёты TDR готовятся к вылету. 1944 год
В предыдущих примерах мы рассматривали управление по принципу «всё или ничего» (на английском известное как bang-bang). Если нет команды, то исполнительные механизмы ничего не делают. Если есть команда — то сразу выполняют её полностью: например, отклоняют рули до предела. Это не всегда удобно. Зачастую лучше пропорциональное управление — когда, например, величина отклонения рулей равна величине отклонения ручки джойстика.
Для простейшего пропорционального управления командой исполнительным механизмам является не один какой-то сигнал, а соотношение между двумя противоположными. Например, если сигналы «вправо» и «влево» передаются по 0,50 секунды каждый — то есть равны по продолжительности, — то рули остаются в нейтральном положении. Но если, например, сигнал «вправо» укорачивается до 0,25 секунды, а «влево» удлиняется до 0,75? Соотношение меняется, и руль поворачивается влево на половину своего предельного отклонения. Если же сигнал «вправо» вообще прекращается, а сигнал «влево» передаётся полную секунду, то руль отклоняется влево до предела.
В то же время, без пропорционального управления порой можно и обойтись. Например, управление американскими бомбами VB-1 AZON изначально хотели сделать пропорциональным, но затем передумали: на испытаниях оказалось, что операторы предпочитают отклонять джойстик до предела и регулировать манёвры бомбы продолжительностью отклонения.
Хотя ранние технологии дистанционного управления не были столь совершенными, как нынешние, они, тем не менее, неплохо работали — и неоднократно применялись на практике. Изящество этих решений наглядно демонстрирует изобретательность и выдумку наших предков, решавших простыми методами такие сложные задачи.