

Содержание:
Разработкой крылатой ракеты нового поколения американский флот заинтересовался в начале 1970-ых – главным образом по соображениям внешнеполитическим. В ходе переговоров США и СССР по ограничению стратегических ядерных вооружений была достигнута договоренность (договор ОСВ-I от 1972 года) “заморозить” на существующем уровне количество подводных ракетоносцев и развернутых на них баллистических ракет. Для американцев это означало сорок одну атомную подводную лодку (“41 за свободу”) с 656 баллистическими ракетами на них.
При этом, ограничивая баллистические ракеты подводных лодок, договор ОСВ-I ничего не говорил о ракетах крылатых. На этом специально настаивала советская сторона – крылатые ракеты большой дальности являлись важной частью не-стратегического вооружения советских подводных лодок. Американцы согласились с этой позицией, и тут же стали думать, как извлечь из этого наибольшую выгоду.
Прогресс технологии в 1970-ых позволил вдохнуть новую жизнь в старую идею – дозвуковой крылатой ракеты, летящей очень низко, скрываясь за неровностями рельефа. Такую ракету было бы очень сложно обнаружить радарами и перехватить зенитными ракетами или истребителями. Однако, чтобы летать на сверхмалой высоте и не врезаться в препятствия, такая ракета должна была иметь очень точную навигационную систему – способную определять ее положение с точностью до десятков метров на протяжении всего полета.
На вооружении ВВС США в 1960-ых стояла крылатая ракета MGM-13 “Mace”, использовавшая аналоговую систему навигации по рельефу местности ATRAN (англ. Automated Terrain Recognition – Автоматическое Распознавание Рельефа). Система сканировала рельеф местности под летящей ракетой с помощью радарного высотомера, и сопоставляла с записанной на кинопленку картой местности, сканируемой при помощи фотоэлементов. Но подготовка полетного задания для ATRAN была очень долгим и трудоемким процессом – требовалось построить точный гипсовый макет местности на всем пути ракеты, затем отснять его специальной кинокамерой – да и сама аналоговая система не отличалась надежностью.

Технологии цифровой эры позволяли эффективно решить эту проблему. Теперь полетное задание могло быть заложено в виде оцифрованного массива данных в памяти бортового процессора ракеты – который также мог значительно эффективнее сопоставлять хранящуюся в его памяти карту с данными от высотомера. С цифровым управлением, дозвуковая крылатая ракета могла лететь на высоте буквально в несколько десятков метров над поверхностью, невидимая для радаров, практически неуязвимая для зенитных ракет и перехватчиков.
Первый план предполагал создание массивной крылатой ракеты большой дальности, запускаемой из шахт подводных ракетоносцев типа “Джордж Вашингтон” и “Этан Аллен”. Эти ранние модели подводных ракетоносцев по техническим причинам нельзя было перевооружить на современные БРПЛ C3 “Посейдон”, и заменить их стареющие БРПЛ А-3 “Поларис” на новые крылатые ракеты представлялось вполне логичным. Однако, такая замена выглядела довольно… ограниченной, поскольку переоборудовать удалось бы всего десять субмарин.
Поэтому предпочтение было отдано второму плану: создать компактную стратегическую крылатую ракету, которую можно было бы запускать из торпедных аппаратов обычных подводных лодок. Такая ракета, хотя и имела бы меньшую дальность и возможности, была бы намного более гибкой в применении. Ею можно было бы вооружить весь огромный флот американских многоцелевых субмарин, тем самым почти удвоив число подводных ракетоносцев.
В июне 1972, командование флота выдало промышленности заказы на проектирование дозвуковой низколетящей крылатой ракеты, запускаемой через торпедные аппараты подводных лодок. Из представленных различными фирмами проектов, в январе 1974 выбрали два: ZBGM-109 от “General Dynamics”, и ZBGM-110 от “Ling-Temco-Vough” (LTV).

ZBGM-109
Проект ZBGM-109 от “General Dynamics” был довольно консервативным. Ракета хранилась в запечатанном пусковом контейнере, который сбрасывался после выхода из торпедного аппарата. Крыло ракеты состояло из двух частей, которые хранились сложенными в боковых прорезях фюзеляжа и выдвигались после запуска. Аналогично сложенными внутри фюзеляжа хранились и хвостовые стабилизаторы и воздухозаборник двигателя – в качестве которого использовался турбовентиляторный Williams F107.

ZBGM-110
Проект ZBGM-110 от LTV был более новаторским, но и более рискованным. Во-первых, она не требовала защитной оболочки для пуска через торпедный аппарат: корпус ракеты был изготовлен достаточно прочным. Изготовленное из стеклопластика крыло хранилось развернутым продольно в длинной прорези в верхней части фюзеляжа ракеты. После запуска, крыло проворачивалось на 90 градусов и фиксировалось в летном положении. Стабилизаторы ракеты имели необычный дугообразный профиль, и складывались вокруг круглого фюзеляжа на шарнирах. В движение ракету приводил турбовентиляторный двигатель Teledyne CAE F106.
Результаты сравнительных испытаний в 1976 году, впрочем, были однозначно в пользу проекта “General Dynamics”. В двух тестовых пусках, прототип YBGM-109 работал безупречно – в то время как оба испытания YBGM-110 от LTV провалились, один раз из-за поломки торпедного аппарата, другой раз из-за нераскрытия крыла. В итоге, уже 8 марта 1976 года флот прекратил сравнительные испытания, и 19 марта объявил BGM-109 от “General Dynamics” победителем.
К этому времени взгляды адмиралов на роль новой крылатой ракеты претерпели определенные изменения. Во-первых, она перестала рассматриваться как часть системы стратегического ядерного сдерживания. Теперь в ней видели средство оперативного нанесения ядерных ударов в интересах флота и приморских флангов сил НАТО, стратегический “резерв” ядерных сил, способный гарантированно пережить основной обмен ударами, и также средство ведения ограниченной ядерной войны на локальном театре (например, против второстепенных ядерных держав, вроде Китая). Во-вторых, носителями ракеты должны были стать не только многоцелевые субмарины, но и надводные корабли. И в-третьих, на ее основе собирались создать дальнобойную противокорабельную ракету с обычной боевой частью, способную нивелировать перевес советского флота в ПКР большой дальности.
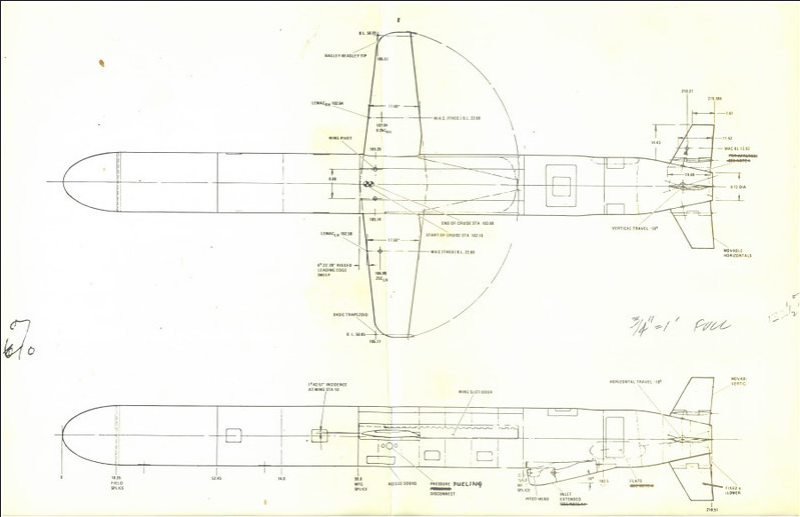
YBGM-109A (атомная) и YBGM-109B (противокорабельная), сверху и снизу соответственно
Но тут снова вмешалась политика, на этот раз – внутренняя. Параллельно с флотом, военно-воздушные силы США вели разработку своей собственной низколетящей крылатой ракеты, AGM-86 ALCM (англ. Air-Launched Cruise Missile, Крылатая Ракета Воздушного Запуска). Обе проектируемые ракеты обладали сходными характеристиками и использовали близкие инженерные решения. Такой подход не слишком-то понравился администрации президента Картера, которая в начале 1977 года потребовала от ВВС и флота разрабатывать свои ракеты на общей технологической базе.
“Заклятым друзьям” из вооруженных сил США пришлось сесть за стол переговоров. В итоге было решено, что флотская система навигации AN/DPW-23 TERCOM от “McDonnell Douglas” находится в гораздо лучшей степени готовности, чем аналог от ВВС, и целесообразно использовать ее на обеих ракетах. С другой стороны, флот согласился использовать авиационный турбовентиляторный двигатель Williams F107, так как он лучше подходил для воздушного пуска. Некоторое время рассматривалась даже возможность принять модифицированную BGM-109 как “общую” ракету, для флота и ВВС одновременно, но в итоге ВВС предпочли собственную AGM-86 ALCM.
На вооружение BGM-109 поступила в 1982 году (изначально – в противокорабельной версии). Ее назвали “Томагавк”, в честь метательного боевого топорика американских индейцев.
СИСТЕМА НАВЕДЕНИЯ
Наведение ракеты “Томагавк” довольно четко разделяется на две стадии: наведение на маршевом участке (на пути к цели) и наведение на терминальном участке (непосредственно на цель). На первой стадии ракета летит запрограммированным курсом, уточняя свое положение по заложенной в ее электронной памяти карте рельефа. На второй стадии ракета идентифицирует область цели по оцифрованным фотоснимкам для точного самонаведения.
В основе навигационной системы ракеты “Томагавк”, вполне естественно, лежит инерциальная платформа (INS – Inertial Navigation System) Litton LN-35 P-1000. Она включает комплекс гироскопов и высокочувствительных акселерометров, обеспечивающих следование запрограммированному маршруту с относительно высокой точностью. Согласно спецификациям, накапливающаяся ошибка составляет около 900 метров (0,5 морской мили) за час полета ракеты.
Такая точность определения положения, очевидно, неприемлема для ракеты, движущейся с огибанием неровностей рельефа. Ошибка в сотни метров может привести к тому, что ракета врежется в препятствие, которое должна была обогнуть. Поэтому система INS используется только в комплекте с другой навигационной системой – TERCOM.
Система TERCOM – Terrain Contour Matching (англ. Соответствие Контуров Рельефа) – основывается на высокоточном радиолокационном высотомере, узким лучом сканирующий местность под летящим “Томагавком”. Его данные сопоставляются с барометрическим высотомером, чтобы определить не только высоту полета ракеты, но и высоту наблюдаемых неровностей рельефа. Последовательность замеров позволяет TERCOM построить высотный профиль местности, над которой пролетает ракета.

Этот профиль, в виде набора цифровых значений, затем сопоставляется с заложенной в память TERCOM картой высот на маршруте ракеты. Примерно представляя (по данным INS) где находится “Томагавк”, система ищет в соответствующей части карты аналогичный профиль рельефа. Обнаружив таковой на карте, система затем сопоставляет положение ракеты по карте – т.е. действительное положение – с положением ракеты по данным INS, и определяет, отклонилась ли (и если отклонилась, то куда и насколько) ракета от запрограммированного курса. На основании привязок к рельефу местности, осуществляемых TERCOM, автопилот ракеты вносит поправки в ее курс, компенсируя накапливающуюся ошибку INS.
Следует отметить, что (вопреки часто встречающимся утверждениям) “Томагавку” вовсе не нужно непрерывно следовать над ясно различимым рельефом. Ракете вполне достаточно, чтобы на ее маршруте было несколько хорошо идентифицируемых точек, по которым TERCOM сможет выполнить привязку к местности. Остальное же время ракета летит на инерциальном наведении.
Действуя совместно, INS и TERCOM обеспечивают ракете высокую точность навигации. Автопилот ракеты использует топографические привязки TERCOM для точного расчета дрейфа гироскопов инерциальной платформы, и учитывает поправки на дрейф при обработке данных INS. Таким образом, точность наведения “Томагавка” непрерывно возрастает на протяжении полета ракеты.
Комбинация INS и TERCOM обеспечивает “Томагавку” выход в район нахождения цели с точностью до нескольких десятков метров. Для версий с ядерной боевой частью этого в общем-то более чем достаточно. Однако, для версий с конвенционной боевой частью (фугасной, или кассетной) такая точность не может обеспечить гарантированного попадания. Требуется дополнительная система терминального наведения.
Для точного наведения на конкретную цель “Томагавк” использует систему DSMAC – Digital Scene Matching Area Correlator (англ. Цифровой Коррелятор Соответствия Области Изображения). Под этим головоломным названием, если вкратце, скрывается система, которая сопоставляет изображение, полученное бортовой телекамерой – с заложенным в память компьютера ракеты, и ищет максимальное соответствие между ними. Если же не вкратце… то давайте рассмотрим работу DSMAC детально.
Чтобы точно навести “Томагавк” на цель, первым делом, готовят цифровую карту района цели. Это делается компьютерной обработкой данных спутниковой, или аэрофотосъемки, а в последнее время и построением виртуальных моделей по топографическим картам. Используя особые программы обработки изображения, на карте выделяют подходящие – четко различимые и идентифицируемые – ориентиры, по отношению к которым задается точное положение цели.
Затем изображение района цели усредняется, его разрешение уменьшается до минимально приемлемого (чтобы не перенапрягать процессор ракеты) и переводится в бинарный черно-белый формат. Полученный результат загружается в память системы DSMAC. Еще раз отметим, что, вопреки популярному мнению, в память “Томагавка” закладывается не “изображение цели”, а “изображение района цели”. Важность этого различия станет понятна далее.
Выйдя по данным INS/TERCOM в район нахождения цели, “Томагавк” активирует систему DSMAC. Которая, в свою очередь, задействует высокочувствительную видеокамеру на основе ПЗС-матрицы для фотографирования местности под ракетой. Для работы в ночное время, используется спаренный с камерой стробоскопический прожектор высокой яркости.
Полученные кадры обрабатываются (на ранних моделях – с помощью аналоговых фильтров, на более поздних – с помощью цифровых программ обработки изображения), усредняются, и построчно переводятся в двоичную форму пониженного разрешения. Затем процессор ракеты сопоставляет полученную оцифровку кадра с хранящейся в его памяти оцифрованной картой района цели. Два набора данных подвергаются корреляционному анализу: программа последовательно сравнивает отснятый кадр с каждым из участков карты, и подсчитывает количество совпавших пикселей.
Те участки карты, на которых уровень корреляции с кадром превосходит установленный при планировании задания, обозначаются как “пики корреляции” и сохраняются в буфере памяти процессора. На приведенном графике можно видеть, как координаты по горизонтальным осям соотносятся со степенью корреляции по вертикальной оси. Чем выше уровень корреляции, тем больше вероятность, что данная точка карты – и есть положение отснятого кадра.
Одиночная привязка к местности, разумеется, не позволяет точно установить положение ракеты. В конце концов, единичный кадр может быть отснят неправильно, в нем могут оказаться помехи (дым, тени), которые выдадут пик корреляции там, где на самом деле его быть не должно. Поэтому для точной привязки к местности применялся анализ последовательности кадров.
На ранних моделях ракеты, для точного определения положения использовался принцип “трех кадров”. То есть ракета сопоставляла пики корреляции, полученные на трех последовательных кадрах, с относительным положением, исходя из скорости, высоты полета и курса ракеты (получаемых от INS/TERCOM). Если хотя бы два из трех кадров удавалось соотнести c относительным положением, то DSMAC считала привязку к местности истинной и, опираясь на нее, рассчитывала положение цели для автопилота ракеты.
На более поздних моделях, корреляционные поверхности, полученные с отдельных кадров, последовательно совмещались по мере движения ракеты. В результате получалась обобщенная корреляционная поверхность для полосы сканирования. Пики корреляции, соответствующие реальным совпадениям при этом становились выше, а случайные совпадения и ошибки сканирования сглаживались.
На основании вышесказанного можно сделать важный вывод: “Томагавк” ищет не “изображение цели” как таковой. Система DSMAC ищет запрограммированную опорную точку, положение которой относительно цели ей известно – и относительно этой точки, выводит ракету в цель. Саму цель “Томагавк” может вообще не видеть, это совершенно не сказывается на точности поражения (также это значит, что маскировка цели совершенно бесполезна, поскольку нельзя угадать, какие именно опорные точки выберут при установке полетного задания).
Начиная с 1990-ых, новые модели ракет “Томагавк” начали также оснащаться системой спутниковой навигации GPS, определяющей точное положение ракеты по сигналам от созвездия высокоорбитальных спутников. Хотя военные изначально относились к этой идее скептически – ранние версии компактных приемников GPS были одноканальными, и уязвимыми для радиопомех – в конце 80-ых удалось создать многоканальные помехоустойчивые приемники спутниковой навигации.
Применение системы GPS позволяет не только дополнительно повысить точность ракеты (за счет введения дополнительной, третьей проверки данных навигационных систем), но и значительно облегчить процедуры подготовки к пуску. Теперь как промежуточные точки ориентирования для TERCOM, так и финальные координаты цели для DSMAC можно просто задать в виде координат GPS, не тратя время на подготовку карт.
Однако, в то время как системы TERCOM и DSMAC невосприимчивы к неприятельскому противодействию, система GPS может быть подвергнута помехам – в виде либо глушения сигнала, либо имитации ложных позиций. Поэтому на практике GPS используется как дополнение к TERCOM и DSMAC, расширяющее их возможности. “Чистый” пуск только по координатам GPS используется только при нанесении тактических ракетных ударов в быстро меняющейся обстановке – когда нет возможности дожидаться подготовки полноценного полетного задания.
КОНСТРУКЦИЯ
Ракета “Томагавк” имеет простую цилиндрическую форму с закругленным головным обтекателем и конической хвостовой частью. Фюзеляж ее изготовлен из алюминиевого сплава, головной обтекатель, крыло и плоскости рулей – из стеклопластика. Снизу ракеты выступает выдвижной воздухозаборник двигателя – при этом сам двигатель расположен внутри корпуса.
Принципиально, фюзеляж “Томагавка” состоит из последовательно размещенных секций. Каждая из секций включает какую-то систему или блок оборудования ракеты. Многие варианты ракеты различаются всего лишь одной-двумя секциями. Такая модульная компоновка делает ракету весьма простой в обслуживании и эксплуатации:
· Секция наведения (Guidance section) – в этой носовой секции, под стекловолоконным обтекателем, размещается блок навигации INS/TERCOM, и (на конвенционных моделях) камера DSMAC.
· Передняя секция фюзеляжа (Forward body section) – в этой секции размещается боевая часть ракеты – ядерная, осколочно-фугасная или кассетная. Поскольку ядерная боевая часть значительно меньше остальных двух, на ядерных версиях в передней секции также располагается дополнительный топливный бак.
· Центральная секция фюзеляжа (Mid-body section) – эта секция на всех моделях занята топливным баком. Бак, в свою очередь, разделен на верхнюю и нижнюю части боковыми нишами (примерно посередине корпуса), в которые складываются половины крыла ракеты. В передней части секции располагается механизм раскрытия крыла, который поворачивает его половины на 90 градусов и фиксирует в этом положении после старта. Боковые ниши закрыты подвижными створками, которые опускаются в момент раскрытия крыла и затем вновь закрываются.
· Задняя секция фюзеляжа (Aft-body section) – в верхней части этой секции размещается дополнительный топливный бак. Нижняя же часть предназначена для размещения воздухозаборника двигателя, который выдвигается наружу после запуска. Здесь же находится блок электронной памяти, в который загружается полетное задание.
· Двигательная секция (Propulsion section) – в этой хвостовой секции располагается турбовентиляторный двигатель ракеты. Ось двигателя отклонена вниз от продольной оси ракеты, чтобы обеспечить лучшее взаимодействие с воздухозаборником. В ней же находятся пневматические сервоприводы, отвечающие за раскладывание рулей и управление ими в полете. Сервомеханика ракеты пневматическая, давление в системе обеспечивается за счет баллона с гелием высокого давления.
Для запуска ракеты, на ее хвостовую часть устанавливается твердотопливный ракетный ускоритель Atlantic Research MK 106, развивающий 26,7 килоньютонов тяги в течение 12 секунд. Стабилизация ракеты на курсе во время запуска осуществляется программным управлением вектором тяги ускорителя. После выгорания ускоритель сбрасывается давлением газов запустившегося маршевого двигателя.





