
Электронные стражи Альбиона: зенитные ракеты «Спаниэль», «Бен» и LOGPAP

Электронные стражи Альбиона: зенитные ракеты «Спаниэль», «Бен» и LOGPAP
Содержание:
Данная статья является компиллятивной, рассказывающей сразу о нескольких проектах британских зенитных управляемых ракет времен Второй Мировой Войны. В отличие от описываемых ранее («Брейкемины» и «Студжа»), ракеты, упоминаемые в данной статье, так и остались на чертежных досках. Тем не менее, их вклад в историю развития британских управляемых вооружений был значителен, и в итоге именно они проложили дорогу к первой поставленной на вооружение ЗУР Королевского Флота — «Seaslug».
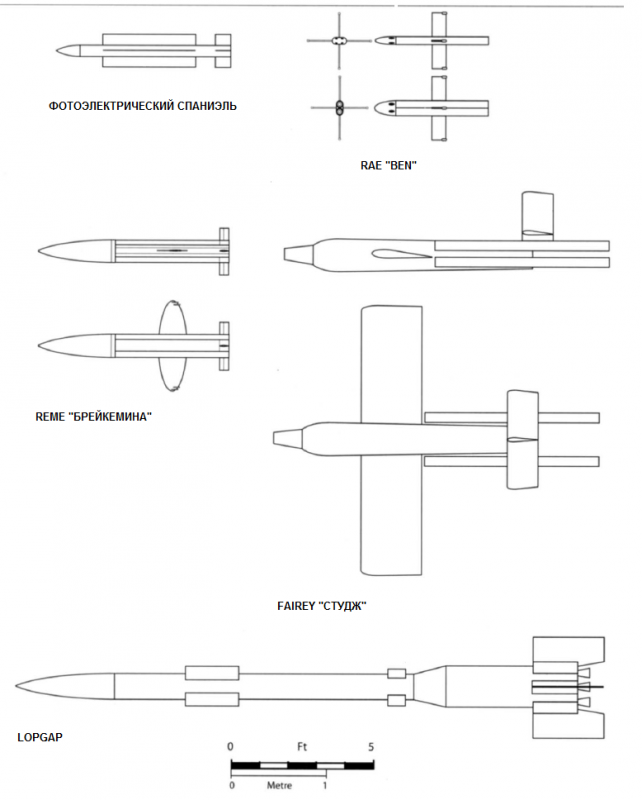
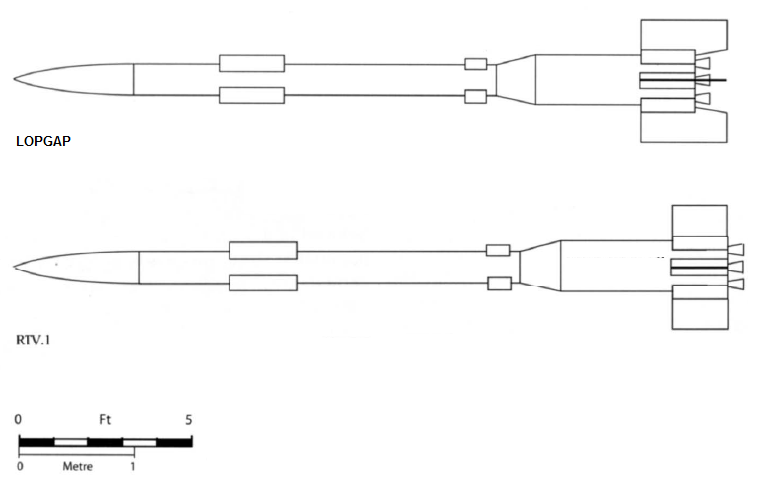
Соотношение размеров британских ЗУР Второй Мировой Войны
Спаниэль
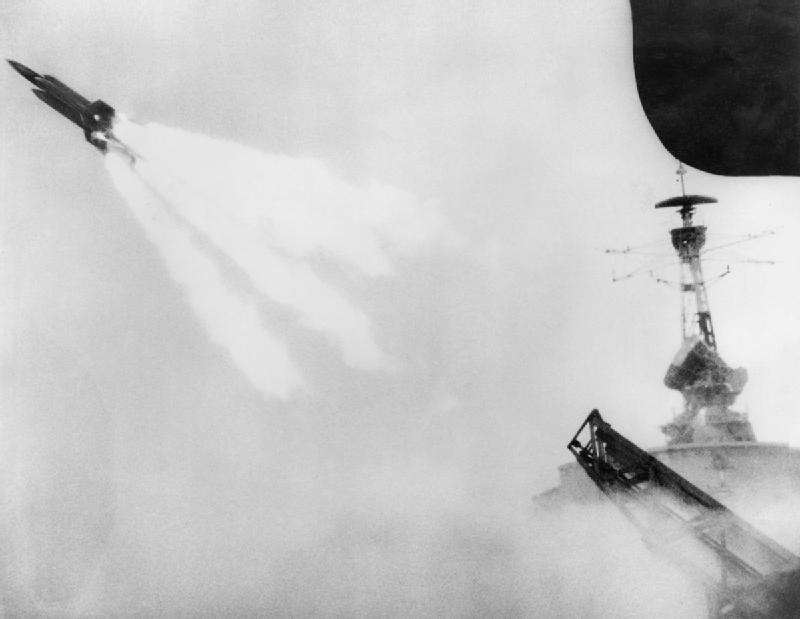
Первыми сравнительно успешными противовоздушными ракетами в истории стали 2-х и 3-дюймовые британские НУР UP (англ. Unrotated Projectile, невращающийся снаряд). Разработанные незадолго до начала войны, они массово ставились на вооружение так называемых “Z-батарей” в 1940-1941, в надежде быстро и недорого усилить оборону Великобритании. Впрочем, взлетали трехдюймовые ракеты эффектно, но не сказать, чтобы особо эффективно. Их рассматривали в основном как вспомогательное оружие, дешевое и не требующее квалифицированного персонала для обслуживания.
В 1941 году, в самый разгар Блица, Бюро Разработки Боеприпасов (англ. Projectile Development Establishment) предложило оснастить стандартную 3-дюймовую ракету UP-3 системой управления, тем самым значительно повысив ее точность и эффективность. Расчеты показывали, что в управляемом варианте 3-дюймовая ракета может стать дешевой и эффективной заменой дефицитным зенитным орудиям – для изготовления зениток требовалась качественная сталь и точная механика, в то время как ракетные двигатели изготавливались буквально миллионами. Предполагалось, что цена “за птичку” (т.е. расход средств на поражение одного самолета) для управляемых ракет не превысит 150 фунтов стерлингов. Значительный выигрыш по сравнению с зенитками, у которых расход боеприпаса на поражение одного самолета уже исчислялся тысячами фунтов!

Программа оснащения 3-дюймовой ракеты системой управления получила название “Спаниэль”, в честь известной породы охотничьих собак. Разработки шли сразу в нескольких направлениях, чтобы “подстраховаться” на случай непредвиденных проблем:
- Фотоэлектрический Спаниэль (англ. Photo-Electric Spaniel, PE-S) – должен был наводиться на цель, освещенную лучом зенитного прожектора. На одном из крыльев ракеты предполагалось установить фотоэлемент, реагирующий на разницу в освещенности между целью и фоном. В зависимости от режима применения, ракета должна была наводиться на более темное/светлое пятно по сравнению с фоном. Рассматривалась также версия PE-S для воздушного пуска (получившая название Air Spaniel), которая должна была запускаться с оснащенных прожектором истребителей.
- Радиокомпасный Спаниэль (англ. Radio Direction Finder Spaniel, RDF-S) – использовал примитивную форму наведения “оседланный луч”. Ракета должна была двигаться к цели, удерживая себя в узком луче сантиметрового радара.
Истребительно-Наводимый Спаниэль (англ. Fighter-Controlled Spaniel, FC-S) – в отличие от остальных, рассматривался не как зенитная ракета, а как ракета “воздух-воздух”, запускаемая с истребителя и наводимая на цель командами пилота по радио. Об этой ракете будет рассказано отдельно в следующих статьях.

Z-battery
Программа “Спаниэль” развивалась поначалу весьма успешно, но в 1942 году интерес к ней значительно снизился. Проведенные расчеты показали, что 3-дюймовый ракетный двигатель RP-3 попросту не сможет обеспечить управляемой ракете приемлемую дальность и скорость полета. Более мощных ракет в Великобритании на тот момент не производилось. Кроме того, в войне наступал перелом – соотношение сил в воздухе прочно изменилось в пользу союзников, и бомбардировки Великобритании стали редким явлением.
Ben
Королевское Авиационное Предприятие (англ. Royal Aircraft Establishment, RAE) работало над зенитными ракетами еще до того, как они стали, собственно, ракетами. Еще в 1930-ых, RAE предложило несколько вариантов “летающих бомб”, приводимых в действие поршневыми моторами с пропеллерами, и предназначенных для поражения летящих строем бомбардировщиков. Начало войны заставило RAE перенести свое внимание на более сиюминутные задачи, но в 1944 году интерес к зенитным ракетам возник снова.

Художественное изображение ЗУР «Бен», атакующей освещенный прожектором германский бомбардировщик
Изучив историю “Спаниэля”, прикомандированный к RAE лейтенант королевских ВВС Самуэль Бенсон решил, что главной причиной неудачи программы были недостаточные возможности 3-дюймового ракетного двигателя. Но на 1944-ый, этот двигатель по-прежнему оставался самым массовым и доступным в Великобритании, и в любых проектах приходилось основываться на нем. Тем не менее, лейтенант Бенсон нашел решение. Если не хватает одной 3-дюймовой ракеты, значит, надо взять две разом! Расчеты показывали, что “спарка” из двух 3-дюймовых ракет вполне в состоянии “потянуть” необходимую систему управления. В честь автора проекта, новая ракета получила название “Бен”.
Конструкция “Бена” была проста, если не сказать – примитивна. По сути, он представлял собой два стандартных 3-дюймовых ракетных двигателя от неуправляемых авиационных ракет RP-3, соединенные бок-о-бок. Длина ракеты составляла всего около 1,2 метра. В центральной части корпуса размещалось крестообразное крыло, бывшее единственным элементом оперения. На носовую часть был надет обтекатель, в котором располагалась боевая часть и система наведения.
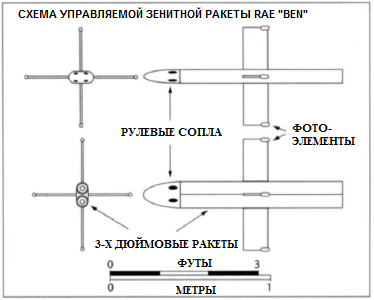
Система управления ракетой была фотоэлектрической, методом “осёдланный луч” – в данном случае, правда, луч зенитного прожектора. Четыре чувствительных фотоэлемента, обращенных назад, крепились на законцовках крыльев. Качество британской элементной базы к 1940 году уже позволяло различать 0,5% изменение яркости освещения, чего вполне хватало для управления снарядом.
Такое решение было выбрано в связи с ограниченностью радарной технологии начала 1940-ых – генерировать луч, достаточно узкий для точного указания положения цели, радары еще не умели. С другой стороны, для наведения на цель луча зенитного прожектора точности радаров вполне хватало. Стандартным решением того времени было, что радар использовался для поиска цели и наведения на нее луча зенитного прожектора, а зенитные орудия уже чисто оптически наводились на подсвеченную прожектором цель.
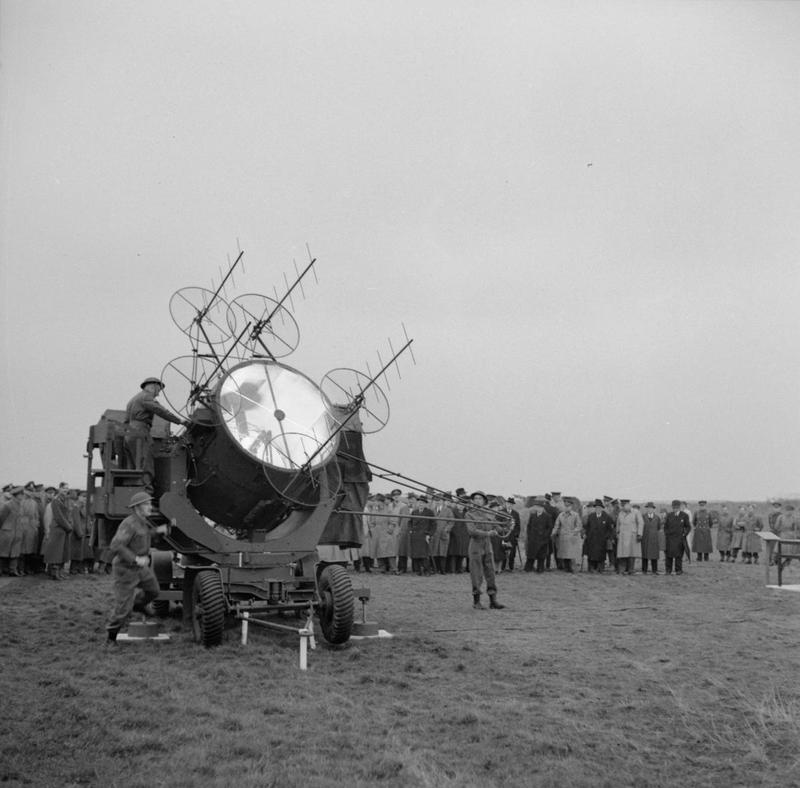
Наводимый радаром зенитный прожектор
Ввиду малых размеров ракеты, применение на ней системы аэродинамического управления было сочтено нецелесообразным. Вместо этого, ракета управлялась газодинамической системой. В передней части каждого из двух двигателей (сразу за головным обтекателем) размещались по два рулевых сопла, повернутые перпендикулярно продольной оси ракеты. Относительно друг друга рулевые сопла были повернуты на 90 градусов. Когда “Бену” требовалось выполнить маневр, исполнительные реле открывали соответствующие сопла, перенаправляя в них часть газов от работающего маршевого двигателя. Недостатком такой системы было то, что она могла работать лишь до тех пор, пока горел основной двигатель.
Пока ракета двигалась по оси луча, сигнал на всех четырех фотоэлементах оставался одинаковым. Если же ракета отклонялась от оси луча, сигналы на фотоэлементах в каждой паре начинали расходиться. Срабатывало исполнительное реле, и соответствующие рулевые сопла открывались, отворачивая нос “Бена” в направлении, противоположном самому слабому сигналу. Подобная система не была особо эффективна – по сути дела, ракета просто искала “где светлее” и отворачивала от темной стороны к светлой – но позволяла обойтись без стабилизации по крену и гироскопического автопилота.
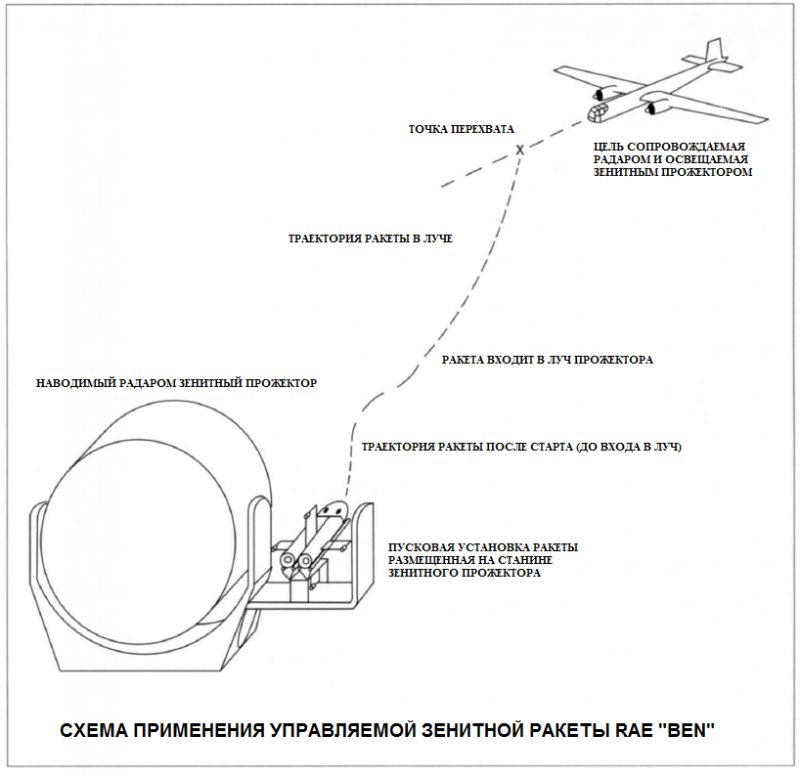
В бою, “Бен” должен был запускаться с пусковой установки, размещенной прямо на станине зенитного прожектора. Это гарантировало попадание ракеты в луч, так как пусковая установка поворачивалась вместе с прожектором. После старта, ракета летела примерно 15-20 метров по прямой, стабилизируемая оперением, прежде чем входила в луч прожектора.
Оператор РЛС, наводившей зенитный прожектор, следил за отметками ракеты и цели на экране. Когда они сливались в одну – что означало, что ракета сблизилась с целью на дистанцию менее 50 метров – оператор выключал прожектор. Потеря сигнала на всех четырех фотоэлементах служила командой для подрыва боеголовки (и заодно решала вопрос самоуничтожения ракеты, на случай если она “вывалится” из луча). Учитывая небольшие габариты ракеты и, следовательно, малый вес боевой части, вероятность поразить цель одним попаданием была невелика, но это могло быть компенсировано одновременным пуском нескольких “Бенов”.
Проект “Бен” стал дебютом RAE на почве управляемого ракетного оружия, но интерес к нему со стороны RAF был достаточно умеренным. “Бен”, при всех его достоинствах, был все же очень импровизационным решением, ориентированным на получение немедленного результата – в ущерб возможностям. Его радиус действия и потолок были достаточны только для поражения низколетящих самолетов. Фотоэлектрическая система наведения, хотя и была весьма простой и элегантной, зависела от условий видимости. К середине войны, стремительное развитие радиолокации позволило создать узкий радарный луч, способный непосредственно наводить ракету. Работы над наводимым радарным лучом “Беном” в итоге привели к проекту УРВВ “Литл Бен”, который затем стал проектом “Лонгшот”, имеющим уже весьма мало сходства с исходной версией ракеты.
В это время “Беном”/”Лонгшотом” заинтересовался флот, который привлекала техническая простота ракеты и возможность ее установки без особых затруднений даже на сравнительно небольшие военные корабли. Еще в 1943 году, флот оценивал перспективы создания компактной и простой управляемой ракеты, способной эффективно поражать атакующие пикирующие бомбардировщики. В то время ограниченность ресурсов не позволила Адмиралтейству развить идею далее, но начало атак камикадзе в 1944 году возродило интерес к управляемому зенитному оружию.
По инициативе флота, RAE продолжила работы над “Беном/Лонгшотом”, теперь уже в двух ипостасях – ракете “воздух-воздух” для вооружения перехватчиков RAF, и зенитной ракете для защиты флота от атак камикадзе. Предполагалось, что ракета сможет поступить на испытания уже в начале 1946 года. Однако, интерес флота к “Бену” не продержался долго, как только стало ясно, что значимо увеличить дальность полета ракеты не получится. В 1946 году, программа была закрыта. Тем не менее, полученные данные были с успехом использованы RAE в дальнейших разработках.
LOPGAP
Первые зенитные ракеты британского флота разрабатывались под конкретную задачу борьбы с японскими камикадзе. Однако, британские адмиралы не собирались этим ограничиваться. Вторая Мировая Война заканчивалась, и Флот Его Величества начинал уже размышлять о будущем – в том числе о будущих конфликтах (которых он всей душой надеялся, но разумом не рассчитывал избежать).
Одним из основных направлений стало переосмысление воздушной угрозы в войне на море. Развитие радаров, зенитной артиллерии и появление неконтактных взрывателей резко снизили эффективность некогда грозных торпедоносцев. Пикировщики (и подобные им самолеты-снаряды камикадзе) еще оставались определенной проблемой, но появление новых автоматических орудий и зенитных ракет малой дальности должно было нивелировать и ее.
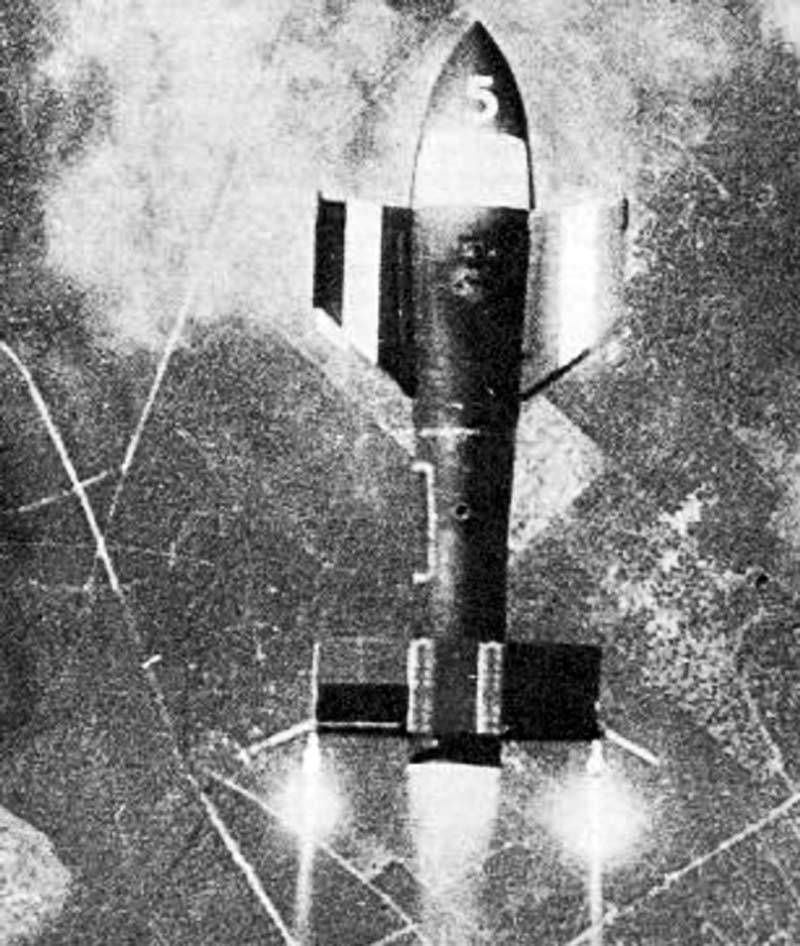
Немецкая управляемая бомба Fritz-X, сброшенная с бомбардировщика. Примитивное и несовершенное управляемое оружие, эти бомбы, тем не менее, наглядно продемонстрировали коренное изменение в воздушной войне над морем
В результате анализа опыта войны, флот пришел к совершенно правильному выводу, что основной угрозой военным кораблям в перспективе будут высотные бомбардировщики, несущие управляемые бомбы и ракеты. Британские моряки по достоинству оценили германские управляемые бомбы Hs 293 и Fritz-X, применявшиеся против них на Средиземном Море: хотя в итоге проблема была решена средствами радиоэлектронного противодействия, британцы прекрасно понимали, что чисто пассивные меры обороны против “standoff”-оружия недостаточны. Флоту требовалось дальнобойное зенитное вооружение, способное эффективно поражать самолеты-носители управляемого оружия до атаки.
Таким оружием, как стало уже ясно, могли быть только зенитные ракеты. Британский флот достаточно намучился с тяжелыми универсальными орудиями, чтобы не испытывать особого оптимизма относительно их перспектив – и в любом случае, артиллерия не могла угнаться за повышением дальности действия управляемого оружия.
В марте 1944 года Директорат Морских Боеприпасов (англ. Directorate of Naval Ordnance – DNO), сформировал комиссию по вопросу управляемых противовоздушных снарядов. Она состояла из четырех тематических подкомиссий: двигательной (под руководством доктора Кроу), аэродинамики управляемых снарядов (мистер Локспайр), радио- и радарной (доктор Парис) и стабилизации и управления (полковник Керрисон). На первом заседании, было признано, что твердотопливные двигатели, хотя и значительно шагнули вперед, тем не менее, уперлись в пределы возможностей порохового топлива и простой формы топливных шашек. Единственным способом добиться требуемых характеристик в тот момент представлялись ракеты на жидком топливе.
Ракета получила название LOPGAP, что расшифровывалось как Liquid Oxygen-Petrol Guided Antiaircraft Projectile (рус. Кислород-Керосиновый Противовоздушный Управляемый Снаряд). Точное написание данной аббревиатуры остается несколько неясным: в литературе также встречаются LOP-GAP, LOP/GAP и LOP GAP. Эскизный проект ракеты был готов в декабре 1944 года. План разработки весьма оптимистично предполагал создание первых прототипов уже к лету 1947 года.
В начале 1945 года, DNO конкретизировал требования к новой дальнобойной зенитной ракете:
- Досягаемость целей по высоте до 12000 метров, по скорости — до 800 км/ч. Наклонная дальность более 15000 метров.
- Время полета ракеты не более 30 секунд.
- Не менее трех ракет в залпе при вероятности поражения цели одной ракетой оцениваемой в 0,3.
- Скорострельность — два трёхракетных залпа в минуту по двум разным целям. Вес боеприпаса – не более 500 фунтов.
- Весь ракетный комплекс по массогабаритным характеристикам должен примерно соответствовать 133-мм 50-калиберной спаренной универсальной артустановке Mark I QF – и заменять таковые из расчета один к одному.
За разработку элементов ракеты взялись несколько различных ведомств. Общее руководство выполнял департамент разработки вооружений Вулвичского арсенала. Созданием маршевого ракетного двигателя занялась “Азиатик Петролиум Компани” (подразделение “Роял Датч Шелл”) – единственная британская компания, имевшая хоть какой-то опыт работы с жидкостными ракетами. Система наведения разрабатывалась предприятием телекоммуникационных исследований (англ. Telecommunication Research Establishment, TRE).
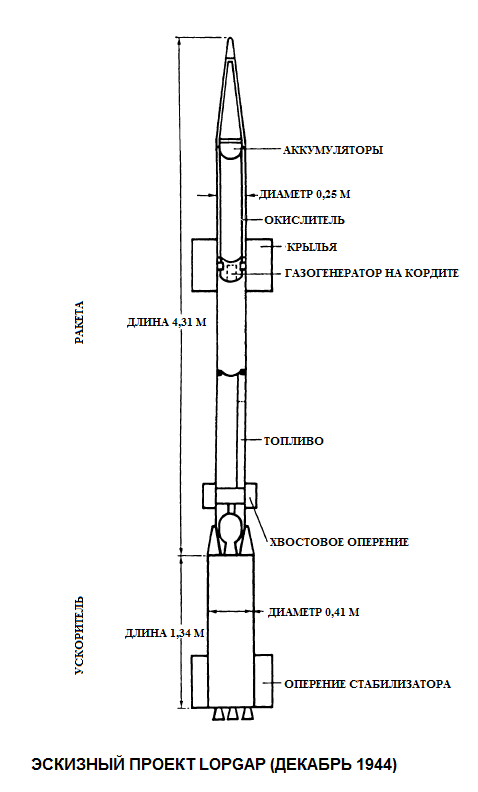
Для своего времени, LOPGAP был весьма впечатляющим снарядом – крупнейшей управляемой ракетой, спроектированной на тот момент в Великобритании. Длина ракеты достигала 5,6 метров с учетом ускорителя (без ускорителя – 4,3 метров). Она имела характерную “ракетную” форму, в виде цилиндра значительного удлинения с коническим носом. Диаметр фюзеляжа самой ракеты достигал 0,25 м, диаметр ускорителя – 0,45 м.
В центре корпуса ракеты Х-образно размещались четыре коротких прямоугольных крыла размахом 0,45 метра, без каких-либо управляющих плоскостей. Управление ракетой в полете осуществлялось четверкой поворотных плоскостей на корме, служивших как для стабилизации по крену, так и для управления по тангажу, методом “twist-and-steer” (совмещенное управление в системе полярных координат). При маневрировании, ракета сначала разворачивала себя по крену так, чтобы ось вращения по тангажу лежала в нужной плоскости, а затем поворачивала себя по тангажу. Пневматические сервоприводы рулей работали от бортового газогенератора.
Как уже упоминалось, LOPGAP был жидкотопливной ракетой – первой жидкотопливной ракетой в Великобритании. Маршевый двигатель типа “Лиззи” работал на паре керосин-кислород, и развивал тягу порядка 500 кгс. Конструкция его была предельно простой, с использованием вытеснительной подачи компонентов при помощи газогенератора на кордите, установленного в центре фюзеляжа. Горение заряда кордита создавало пороховые газы, которые толкали поршни (!) по бакам, выдавливая компоненты топливной смеси. Тяги двигателя не хватало для эффективного отрыва ракеты, поэтому запуск LOPGAP выполнялся с помощью стартового ускорителя, состоявшего из семи 5-дюймовых твердотопливных ракет. Установленный в хвостовой части снаряда ускоритель разгонял ракету до скорости порядка 1,5 Маха, после чего выгорал и сбрасывался.
Наведение LOPGAP должно было выполняться методом “осёдланный луч”. Радар сантиметрового диапазона должен был формировать узкий вращающийся луч, вдоль оси вращения которого ракета двигалась к цели. Подобная система уже разрабатывалась фирмой «Коссор» по заказу командования ПВО, для упомянутой ранее ЗУР “Брейкемина”. Однако, флот разработка «Коссор» не устраивала. Главным ее недостатком было то, что для сопровождения цели и ведения ракеты использовался один и тот же радар. Так как цель двигалась, то луч радара постоянно смещался за ней, и ракета в результате двигалась по дуге, тратя излишнее время на то, чтобы “гоняться” за целью. С точки зрения флота, предпочтительнее было бы, чтобы ракета двигалась не прямо на цель, а в расчетную точку упреждения.

Серийный радар Тип 901. Изображений опытной версии не сохранилось
Для управления ракетой использовался радар Тип 901, разработанный для так и не поступившей на вооружение системы управления огнем LRS1. Это была намного более совершенная система, чем обычные зенитные РЛС того времени. В первоначальной версии, радар имел два антенных “блюдца”, смонтированные на вращающемся лафете (заимствованном от автоматической пушки “Пом-Пом’). Одна антенна выполняла непрерывное сопровождение цели, передавая данные о ее смещениях вычислительному устройству. Электромеханический калькулятор, исходя из дистанции до цели и темпа ее смещения, рассчитывал точку упреждения и приводил к ней луч второй антенны – по которому и двигалась ракета. Таким образом, запущенная ракета не “гонялась” бы за целью, а двигалась в точку упреждения. Если цель меняла курс, вычислитель пересчитывал точку упреждения. Позднее, оба “блюдца” было решено объединить в единой антенне, совмещающей сопровождение цели и формирование командного луча для ракеты.
Взрывчатый заряд должен был устанавливаться в носовой части ракет, сразу за головным обтекателем. Боевая часть должна была приводиться в действие либо неконтактным радиолокационным взрывателем (на базе американского VT), либо по команде с корабля, когда координаты ракеты и цели на радаре совпадали. Боевая часть должна была быть “достаточно тяжелой, чтобы гарантировать уничтожение 4-моторного бомбардировщика типа “Ланкастер””. Разработка взрывателя в итоге развилась в достаточно комплексный проект, и стала одной из причин задержек всей программы.
Запускаться LOPGAP должен был с трехзарядной пусковой установки, разработанной на базе лафета для 3-дюймовой зенитной автопушки. Перезарядка осуществлялась из подпалубных погребов, оснащенных автоматизированной системой заправки ракеты жидким кислородом непосредственно перед подачей на пусковую. Перед стартом, пусковая установка наводилась по горизонтали и вертикали, и производился последовательный пуск всех снарядов. Время реакции от боевой тревоги и до пуска первой ракеты не должно было превышать 30 секунд. Основными носителями LOPGAP в тот момент представлялись крупные корабли – линкоры и крейсера ПВО, обладавшие избытком места, необходимого для работы с жидким топливом. Предполагалось (излишне оптимистично), что ракетный комплекс будет заменять универсальные 133-мм пушки из расчета 1 к 1.
Хотя флот и был чрезвычайно оптимистично настроен в отношении LOPGAP (поступление ракеты на испытания ожидалось “не позднее” лета 1947 года!), но даже самые рьяные ракетные энтузиасты вскоре были вынуждены признать, что столь комплексную программу не получится реализовать “с наскока”. Собственного опыта в разработке управляемого оружия флоту тоже не хватало. Поэтому, после серии бросковых испытаний макета ракеты (на которых изучали ее аэродинамические характеристики) в 1946 году Адмиралтейство приняло решение объединить программу LOPGAP с “Лонгшотом” RAE и перевести весь проект под эгиду Королевского Авиационного Предприятия.
В RAE работы над управляемыми ракетами весьма прагматично начали с создания упрощенных прототипов, для отработки отдельных аспектов проекта. LOPGAP в этом плане представлял особенной интерес, поскольку по нему уже был выполнен значительный объем работ, и сам он являлся идеальной основой для “испытательной” ракеты. На базе LOPGAP во второй половине 1940-ых была создана экспериментальная ракета, получившая название Research Test Vehicle 1 (или просто RTV.1). Где-то примерно в это время в документах начал впервые фигурировать термин «Си Слаг» (англ Sea Slug, морской слизень) как кодовое обозначение оружия, которое предполагалось создать в результате исследований.
Первый полет RTV.1 состоялся на ракетном полигоне Аберпорт вУэльсе, в 1948 году. Запущенные ракеты Затем испытания переместились на полигон Вумера в Австралии – места в самой Великобритании для безопасного (и секретного) испытания ракет уже не хватало. Первые ракеты серии RTV.1E предназначались исключительно для отработки системы управления и автопилота, и не оснащались ни боевой частью ни взрывателем. Следующая версия – RTV.1Q – была уже полноценным прототипом боевой ракеты, включавшей взрыватель и телеметрическую “боевую часть”, использовавшуюся для передачи информации о работе взрывателя. На некоторых ракетах, вместо телеметрической устанавливалась полноценная боеголовка. Именно с помощью RTV.1Q в 1954 году был выполнен первый успешный перехват британской зенитной ракетой беспилотной летающей мишени (сами ракетчики на эту тему шутили, что «мишень героически перехватила собой зенитную ракету, несмотря на отчаянные попытки последней уклониться»).

RTV в музее Вумеры
Благодаря программе RTV, был получен значительный объем данных, сыгравших неоценимую роль в дальнейшей разработке британского ракетного оружия. Тем не менее, этот опыт дал также понять, что до боеспособного оружия британским ракетам еще далеко. Уже в начале 1950-ых, флот выдвинул несколько дополнительных требований к оружию, которое предполагалось создать на основе RTV.1 Основным было желание флота отказаться от топливной пары керосин-кислород. Британский флот не слишком-то вдохновляла перспектива оперировать с жидким кислородом на борту военных кораблей (особенно в боевой обстановке!), кроме того, температура горения керосин-кислородной смеси была на грани возможностей довольно примитивного двигателя. В качестве альтернативы жидкому кислороду как окислителю, инженеры предложили пероксид водорода и азотную кислоту. Флот, исходя из принципа меньшего из зол, выбрал вторую.
Кроме того, значительная длина ракеты делала ее чрезвычайно неудобной для обращения на борту корабля. Британский флот был весьма озабочен вопросом “что делать, если из-за поломки или боевых повреждений механика перезарядки откажет?” Тягать вручную длинную и тонкую ракету по узким корабельным коридорам, и запихивать ее на пусковую установку было бы той еще акробатикой. Поэтому выбирая между длиной и диаметром, моряки единодушно решили, что ради сокращения длины снаряда можно пойти на увеличение его диаметра. Решением проблемы было бы отказаться от тандемной компоновки и разместить стартовые ускорители по «пакетной» схеме вокруг тела ракеты. Это решение также позволяло упростить стабилизацию ракеты на старте, и гарантировать взлет в случае отказа одного из ускорителей. Эти, и другие изменения, потребовали пересмотреть концепцию испытательного аппарата, что и было сделано в следующей модели — RTV.2. История LOPGAP на этом завершилась, но тем не менее в конечном итоге именно эта программа породила Armstrong Whitworth «Seaslug».
Источники
- British rocketry during World War II — John Becklake, AAS History Series, Vol. 14 (1993)
- British Secret Projects 4: Hypersonics, Ramjets and Missiles — C. Gibbons, T. Battler, Midland Publishing (1997)
- The Early Development of Guided Weapons in the United Kingdom, 1940-1960 — S.R. Twigge, Harwood Academic Publishers (1993) — самой книги у меня нет, данные по цитатам в других источниках.
- Seaslug Story — Flight, 25 January 1962, pp. 1420143
- Museum of applied arts & sciences, Australia.





