
Тяжелые экранопланы и многоразовые космические аппараты: перспективный тандем.
Известно, что запуск космических аппаратов в экваториальных широтах позволяет значительно снизить энергозатраты по выводу в космос полезной нагрузки. Например, при переносе космических запусков России из высоких широт, где расположены ее сухопутные космодромы, в районы экватора величина выводимой одними и теми же ракетами-носителями полезной нагрузки возрастает в 1,7-2 раза. Данное обстоятельство — серьезная предпосылка для использования Мирового океана в интересах развития перспективных космических систем. Пример такого использования — успешно функционирующий международный морской плавучий ракетно-космический комплекс Sea Launch (Россия, США, Украина, Норвегия). Он предназначен для запусков невозвращаемых ракет-носителей, стартующих в вертикальном положении.
Однако наибольшие надежды на значительное удешевление космических запусков специалисты связывают с созданием полностью возвращаемых многоразовых воздушно-космических самолетов (ВКС). Их вертикальный старт с поверхности океана возможен с аналогичных Sea Launch платформ или специальных судов. В то же время технически оправданной схемой их возвращения остается горизонтальная посадка на соответствующую сухопутную посадочную полосу, что трудно обеспечить в экваториальных широтах.
В этих условиях практически единственный вариант осуществления горизонтальных и старта и посадки многоразовых космических аппаратов (МКА) связан с использованием экранопланов (WIG — wing-in-ground craft) в качестве разгонно-принимающей ступени для запуска и приема ВКС. Обычно в подобных проектах рассматриваются экранопланы с большой взлетной массой (от 1500 до 2000 т) и воздушно-космические самолеты массой 600 — 800 т. Но их создание — дело отдаленной перспективы. Между тем, решение проблемы горизонтальных старта и посадки с поверхности океана может быть реализовано гораздо раньше на базе экранопланов массой до 750 т и ВКС массой до 300 т. Как показывают проведенные проектные, теоретические и экспериментальные исследования, система горизонтального морского старта и посадки МКА с использованием экранопланов (WSL — WIG Sea Launch) способна обеспечить доставку полезной нагрузки на низкие, в том числе полярные и экваториальные орбиты. Инфраструктура системы WSL должна включать две части — наземную и морскую. В первую входят следующие компоненты:
— порт-база судов с терминалом для стоянки и загрузки транспортного судна-доставщика ВКС, экранопланов и судов обеспечения, а также монтажно-испытательный полигон;
— транспортная система, предназначенная для доставки компонентов ВКС,топлива, полезной нагрузки с предприятий-изготовителей в порт-базу системы WSL;
— наземно-космические средства траекторных телеизмерений, управления полетами, навигационного и гидрометеорологического обеспечения.
Морская инфраструктура предполагает следующие элементы:
— судно-доставщик ВКС, оборудованное средствами перегрузки ВКС на экраноплан и проведения завершающих предстартовых процедур;
— экраноплан-разгонщик-приемщик ВКС;
— суда обеспечения системы WSL.
В период проведения запусков космических аппаратов судно-доставщик ВКС, суда обеспечения и экраноплан выдвигаются в район запуска, где завершается предстартовая подготовка ВКС.
Непосредственно перед запуском производится перегрузка ВКС на экраноплан и заправка их топливом. Затем осуществляется взлет экраноплана с ВКС на борту. При достижении необходимой скорости движения происходит запуск двигателей и отделение ВКС. В случае использования двухступенчатого ВКС после разделения ступеней на высоте примерно 30000 м отработавшая ступень совершает посадку на летящий экраноплан и затем перегружается на судно-доставщик. Аналогично совершается посадка на летящий экраноплан и самой орбитальной ступени при ее возвращении, после чего возможен ее новый запуск. Стыковка ступеней ВКС и экраноплана осуществляется после уравнивания их скоростей (вертикальная стыковка при нулевой относительной скорости) с помощью специальных стыковочных узлов-ловителей. С учетом дополнительной скорости, полученной за счет экваториального старта, обеспечивается начальная круговая скорость ВКС порядка 600 м/с. По оценкам исследователей, благодаря использованию экраноплана-приемщика-разгонщика возможно увеличение полезной нагрузки ВКС на 30-40%.
Дополнительное преимущество данной схемы в том, что двигательные установки ВКС включаются в работу на дозвуковых скоростях, которые достаточны для запуска прямоточных воздушно-реактивных двигателей (ПВРД), являющихся маршевыми на всем атмосферном участке полета ВКС. Использование ПВРД вместо турбореактивных двигателей (ТРД) позволяет значительно снизить вес двигательной установки ВКС, упростить ее конструкцию, повысить надежность работы.
Кроме того, достигается экономия горючего для ВКС в диапазоне скоростей до 150 м/сек., что дает возможность увеличить массу полезной нагрузки. Уменьшается также вес шасси ВКС.
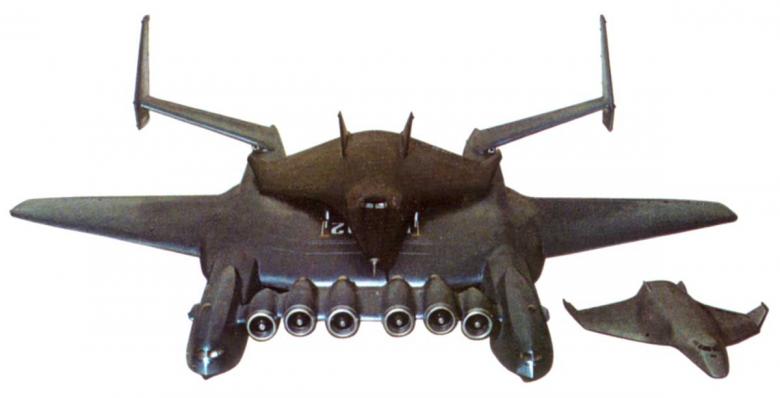
Экраноплан выполнен по схеме "составное крыло" с двумя корпусами-фюзеляжами аналогично судам катамаранного типа. В его носовой части расположены двигатели, отходящие газовые струи которых при взлете экраноплана и в процессе взлета-посадки ВКС направляются специальными дефлекторами под центральное крыло, создавая тем самым экраноплану дополнительную подъемную силу и не воздействуя на ВКС. Он способен осуществлять длительное движение по воде в водоизмещающем режиме.

ВКС располагается на центральном крыле. Для облегчения отхода и подхода ВКС хвостовая часть экраноплана выполнена разрезной, с двойным вертикальным оперением.
Воздушно-космический самолет разработки Военного инженерно-космического университета имени А.Ф.Можайского представляет собой двухступенчатую авиационно-космическую систему, состоящую из пилотируемого сверхзвукового самолета (разгонной ступени) и пилотируемой орбитальной ступени с отсеком для размещения полезной нагрузки, выводимой на орбиту. Аэродинамическая схема ВКС — дельтаплан.
При проектировании планера ВКС особое внимание уделялось как интеграции крыла, фюзеляжа и двигательных установок самолета разгонщика и орбитальной ступени, так и взаимному расположению ступеней. Форма самолета обеспечивает размещение второй ступени в полузатопленном положении снизу.
Благодаря такой компоновке обеспечивается возможность одновременной работы двигательных установок обеих ступеней непосредственно со старта, что значительно повышает тяговооруженность комплекса на начальном участке полета. Кроме того, снижается общее лобовое сопротивление за счет уменьшения поверхности трения и снижения индуктивного сопротивления элементов конструкции, а также уменьшаются интегральные тепловые потоки на гиперзвуковых скоростях полета.
Нижнее положение второй ступени позволяет значительно упростить комплекс монтажно-стыковочного оборудования для предстартовой подготовки ВКС, так как отпадает потребность в мощных подъемных кранах, необходимых для монтажа второй ступени. Стыковка ступеней ВКС может производиться "надвиганием" разгонной ступени на орбитальную ступень с последующим подъемом последней в нишу фюзеляжа разгонной ступени. Такая операция возможна на судне-доставщике ВКС или даже на экраноплане-разгонщике-приемщике непосредственно в море.
В перспективе возможно создание ВКС в виде одной ступени массой до 300 т с жидкостными реактивными двигателями. В аэродинамике совместного полета исследовались прежде всего влияние установленного на центральном крыле ВКС , изменение его характеристик ВКС в процессе отделения от экраноплана (вертикальной стыковки и расстыковки) и достаточность тяги энергоустановки экраноплана для обеспечения полета с ВКС на борту.
Испытания комплекса "экраноплан — ВКС" в состыкованном состоянии в аэродинамической трубе показали, что установка ВКС на экрапоплан приводит к несущественному (порядка 5%) падению коэффициента подъемной силы экраноплана в рабочем диапазоне углов атаки и высот его движения над подстилающей поверхностью. Значительно более существенно изменяется коэффициент сопротивления, возрастание которого может составить до 25-30%. Соответственно снижается общее аэродинамическое качество всей системы. При этом падение качества на малых высотах полета над экраном относительно меньше.

Ввиду 2 — 2,5-кратного резервирования тяги экраноплана в режиме полета, его энергоустановка всегда обеспечивает функционирование комплекса.
Наличие щелевой протоки между нижней поверхностью ВКС и верхней поверхностью центрального крыла экраноплана и взаимная аэродинамическая интерференция отдельных их конструктивных элементов обуславливают особенности полета ВКС вблизи экраноплана. Так, на малых удалениях от экраноплана подъемная сила ВКС достаточно велика благодаря "экранному" эффекту, однако при продолжении удаления имеет место "провал" по подъемной силе, поскольку в начальный период отделения падение коэффициента подъемной силы не компенсируется увеличением скорости ВКС.
Коэффициент силы сопротивления ВКС существенно зависит от взаимного расположения энергетической установки экраноплана и ВКС. При малых удалениях последнего коэффициент сопротивления снижается как за счет экранного эффекта, так и из-за торможения потока в вихревом следе двигателей экраноплана.
Результаты экспериментов по взлету и посадке летательных аппаратов на движущийся экраноплан, полученные на пилотажном стенде как с помощью инструментальных измерений, так и по оценкам пилота-испытателя, подтверждают возможность управления совместным движением экраноплана и летательного аппарата на всех стадиях этого процесса. Наиболее сложным для пилота является управление ВКС по высоте над экранопланом,требующее знания достаточно точных значений этой высоты.
Повышенная инерционность тяжелых экранопланов при маневрировании по курсу заставляет заблаговременно выводить его на заданную линию прямолинейного движения и активно управлять только продольной скоростью. Высота полета экраноплана при посадке ВКС должна достаточно жестко стабилизироваться. В этом случае сближение ВКС и экраноплана по высоте и компенсация бокового смещения будут происходить при активной роли ВКС, а их сближение в продольной плоскости может быть скорректировано маневрированием скоростью экраноплана.
Для управления совместным движением аппаратов при стыковке будет использоваться многомерная цифровая система автоматического управления.
Наиболее подходящий метод получения информации о параметрах относительного линейного и углового движения двух летящих крыльевых аппаратов — использование цифровой телевизионной оптической навигационной системы. Размещение на палубе экраноплана видеокамер инфракрасного диапазона позволит непрерывно вводить в компьютерную систему обработки последовательные входные изображения с высоким разрешением. При этом на завершающем этапе сближения при уменьшении относительной высоты ВКС до 5 м обеспечивается точность определения его относительного положения по горизонтальному смещению и по относительной высоте порядка 10 см, а по угловому положению — порядка 20 мин.
На заключительном этапе стыковки включается дополнительный исполнительный орган в контуре управления относительным движением — разомкнутый канал управления локальным перемещением стыковочного узла экраноплана по его посадочной палубе.
Техническая реализуемость проекта WIG Sea Launch настоятельно требует проведения оценки его экономической целесообразности и перспективности.
| Основные технические характеристики | ||||
|---|---|---|---|---|
| Экраноплана | ВКС | |||
| 1 ступень | Орбитальная (2) ступень | |||
| Полная полетная масса, т | 750 (с ВКС) | 300 (с 2 ст.) | 100 | |
| Вес полезной нагрузки, т | 6 | |||
| Двигательная установка | ТРД 6х 30-35 тс | 4 ПВРД | 2 ПВРД и 2 ЖРД | |
| Энергетическая установка малого хода | 2 быстроходных дизеля | |||
| Скорость движения, км/ч | в полете | 550-600 | ||
| малого хода | 25 | |||






