
«Томагавк» для попаданца: как при помощи транспондера и голубя создать ракету

«Томагавк» для попаданца: как при помощи транспондера и голубя создать ракету
Содержание:
Попаданцы, как известно, народ туповатый и неизобретательный. Стоит им только провалиться во Вторую мировую, и максимум, на что их хватает, — это промежуточный патрон да Т-54. Ну и всякие туманные инструкции «как сделать атомную бомбу», если ноутбук с собой захватили. А если попросишь что-нибудь похитрее, так сразу начнут «это мы не проходили на доступной технологии не получится». Но мы-то не попаданцы, мы народ образованный и знающий. Поэтому сделаем «Томагавк» — дальнобойную крылатую ракету для морского, воздушного и наземного запуска, с автономным самонаведением и высокой точностью попадания.
Изобретательные янки
Когда речь заходит о крылатых ракетах Второй мировой, обычно сразу начинают кивать на немцев с их Фау-1. Но это тупиковый путь. Во-первых, нацисты в плане высоких технологий — ещё тупее, чем среднестатистические попаданцы. Сделать нормальную систему самонаведения они не смогут даже под страхом смертной казни. Во-вторых, Фау-1 на роль высокоточного оружия подходит слабо из-за примитивной системы управления. Она просто не рассчитана на выполнение точных манёвров.
Поэтому мы будем играть за американцев. У янки есть все для этого необходимое: развитая (самая развитая) индустрия, изобретательность и рациональный подход. Высокоточная крылатая ракета дальностью в 100-150 километров для них будет отличным «промежуточным звеном» между корабельной артиллерией и палубной авиацией.
За основу возьмём планирующую бомбу проекта SWOD — Special Weapon Ordnance Development (англ. «разработка боеприпасов специального вооружения»). Именно эта программа дала в конце войны американцам планирующую бомбу ASM-N-2 Bat, с полностью автономным радарным самонаведением «выстрелил и забыл».
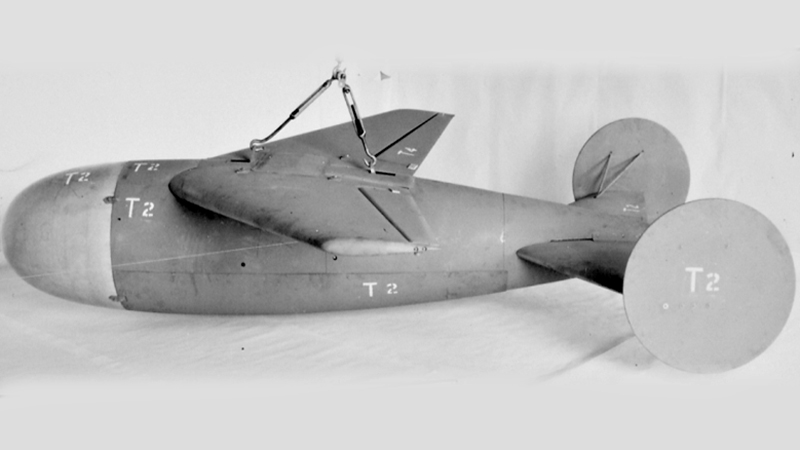
Планирующая бомба программы SWOD
Для нас важно, что эту программу начали достаточно рано, уже к 1943-му она находилась в хорошей стадии отработки. Также немаловажно, что бомбы программы SWOD отличаются неплохой манёвренностью — их ведь создавали для поражения движущихся кораблей — и могут приводиться к цели с очень высокой точностью. Их механика управления вполне рассчитана на поражение точечных целей и не потребует никаких доработок.
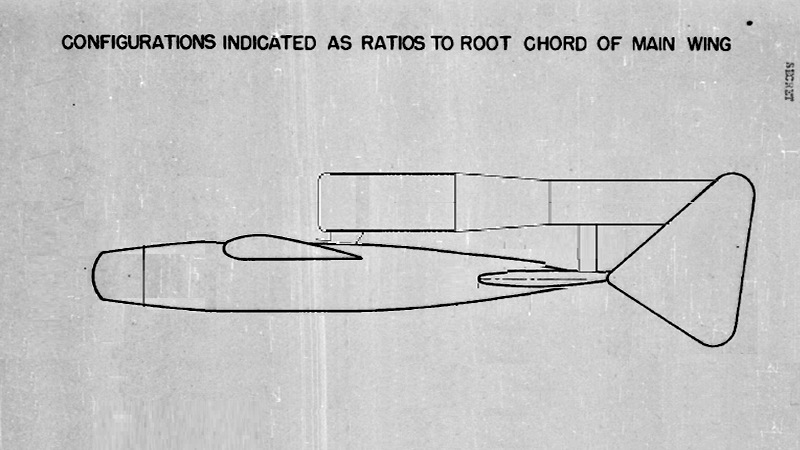
В ходе программы SWOD было разработано несколько типоразмеров планера. Мы возьмём самый крупный, с 3,65-метровым (12 футов) размахом крыла, рассчитанный на 907-килограммовую (2000 фунтов) бомбу. Почему именно его? Ну, главным образом потому, что для переоборудования планирующей бомбы в крылатую ракету нам потребуется установить на неё двигатель и много другой аппаратуры, а это значительно увеличит вес.
Уменьшив вес боевой части в два раза — до 454-килограммовой (1000-фунтовой) бомбы, мы высвободим почти полтонны без перегрузки планера. И при этом наша боевая часть будет достаточно мощной, чтобы поразить большинство целей.
Двигатель
Пожалуй, самым лучшим из доступных двигателей для беспилотных снарядов в 1940-е годы был пульсирующий воздушно-реактивный: немецкий Argus As-014 и его американская копия Ford PJ-31. Такой двигатель был очень дешёвым, компактным и работал оптимально на скоростях около 600 километров в час. Самое оно для крылатой ракеты.

Двигатель Ford PJ-31 на стенде
Главное достоинство пульсирующего двигателя — это его очень низкая стоимость (немаловажно для одноразовых ракет!) и хорошее отношение тяги к весу. Главный же недостаток — его прожорливость. В рабочем режиме PJ-31 тратил по 25-30 литров бензина в минуту.
Сколько нам потребуется топлива для полёта на, скажем, 120 километров? Попробуем посчитать, исходя из того, что последние 20 километров наша ракета сможет планировать самостоятельно (в основе у неё все-таки планирующая бомба с хорошим аэродинамическим качеством!). Полёт на 100 километров со средней скоростью 600 км/ч потребует около 10 минут. Добавим ещё пять минут на набор высоты и прочие факторы — и мы получим, что нам нужен запас в 450 литров бензина.
При средней плотности бензина в 0,73 кг/л выйдет, что нам нужно 360 кило топлива. Вместе с двигателем весом около 170 килограмм и баком мы получим суммарный вес силовой установки около 550 кило, что хоть и утяжелит планер, но не критично.
Установленный на «спине» планера двигатель превратит планирующую бомбу в крылатую ракету.
Для воздушного запуска больше ничего и не требуется.
Однако для взлёта с поверхности пульсирующий двигатель непригоден: при отсутствии набегающего потока его тяга слишком мала.

Взлёт будет выглядеть примерно так: внизу отцепившаяся разгонная тележка
Поэтому мы используем твердотопливные стартовые ускорители JATO — сбрасываемые пороховые ракеты, — закреплённые под крылом. Связка из нескольких стандартных JATO 8S1000 (время горения — восемь секунд, тяга — тысяча фунтов, т. е. около 450 кило) вполне обеспечит взлёт ракеты на стартовой тележке с разгонной рампы или короткой нулевой направляющей. Которую вполне можно будет без труда уместить на палубе корабля или субмарины.
Управление на курсе
С двигателем разобрались; как теперь вывести нашу ракету к цели? Простой автопилот едва ли справится с задачей: точность гироскопических автопилотов в то время всё ещё оставляла желать много лучшего.
Самый простой способ — отслеживать полёт ракеты радаром (корабельным, наземным или авиационным) и посылать команды «вправо» и «влево», если она отклонится от курса. Для этого подойдёт и обычный поисковый радар. Оператор будет отслеживать движение ракеты как метку на экране и сопоставлять его с азимутом цели. Если ракета отклонится от курса, оператор вернёт её на прежний путь командами.
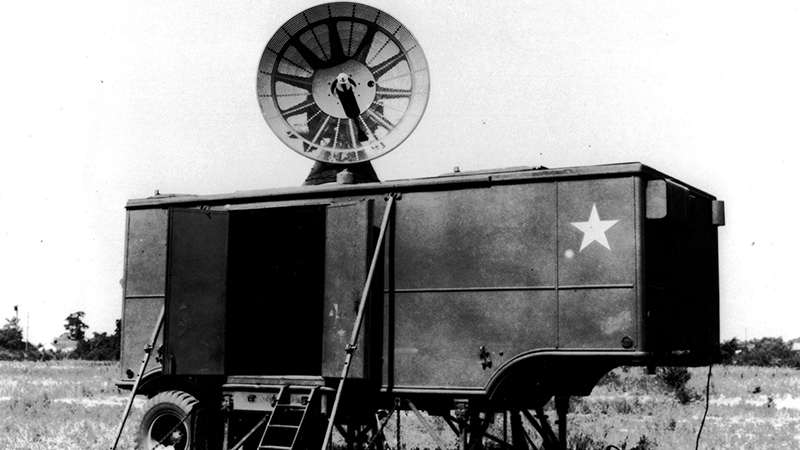
Один из оптимальных вариантов — радар SCR-584, одна из первых РЛС конического сканирования с автоматическим сопровождением цели
Чтобы улучшить заметность ракеты (все же она очень маленькая), установим на ней транспондер-маяк, настроенный на рабочие частоты радара. Транспондер будет принимать сигнал радара, усиливать и отсылать обратно после небольшой задержки.
Таким образом, радар будет принимать не слабое эхо собственного сигнала, а мощный ответ транспондера и сможет различить нашу ракету на много большей дистанции.
Систему управления позаимствуем от массово производящихся в США летающих мишеней Radioplane. Команды задаются акустическими тонами, передаваемыми станцией управления на несущей частоте. На ракете, полученный сигнал из приёмника подаётся параллельно на систему узкополосных ламповых фильтров, каждый из которых настроен пропускать только один определённый тон, а остальные игнорировать. На выходе каждого фильтра — командное реле. Когда с приёмника поступает соответствующий фильтру тон, реле замыкается, и ток подаётся на исполнительные механизмы.
Для ракеты нам нужны только три команды: «вправо», «влево» и «переход на самонаведение». Смысл первых двух команд очевиден: они заставляют ракету поворачивать вправо или влево. Достигается это просто: когда поступает соответствующая команда, то в системе замыкается реле, подающее ток на механизм, отклоняющий рамку курсового гироскопа. Автопилот воспринимает это как «искусственную ошибку» и начинает поворачивать ракету.
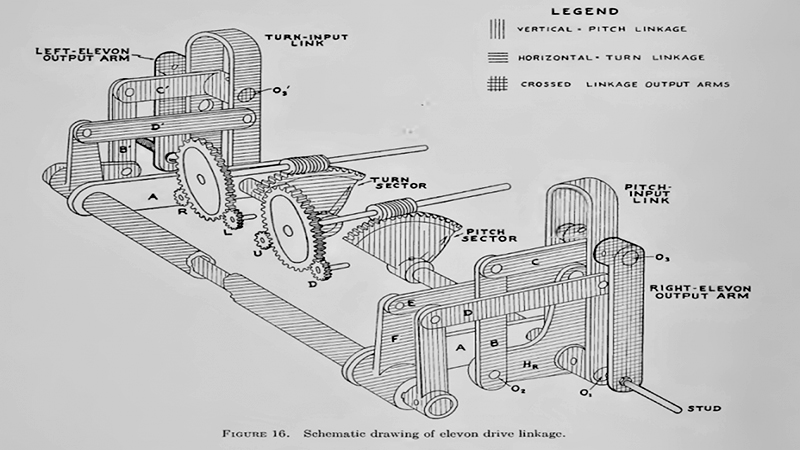
Сервосистема бомб серии SWOD использовала оригинальный механизм контроля, позволявший управлять полётом бомбы исключительно с помощью элевонов
Управление по высоте нас особо не интересует. Здесь будет достаточно обычного авиационного высотомера — радарного, серии AN/APN-1, или даже барометрического, предварительно выставленного на желаемую высоту полёта. Подключённый к соответствующему гироскопу автопилота, высотомер будет автоматически вырабатывать команды «вверх» и «вниз», удерживая ракету более-менее ровно на нужной высоте.
Команда «переход на самонаведение» нужна, чтобы переключить ракету из командного режима — в режим самонаведения, когда та достигнет примерного расположения цели. Когда ракета получит эту команду, в системе управления замкнётся реле, которое:
Во-первых, отключит радиоприёмник и высотомер от автопилота — они более не нужны для управления ракетой.
Во-вторых, воспламенит пироболты, крепящие двигатель и топливный бак к спине ракеты, — нет никакого смысла тащить их дальше, лучше сбросить.
В-третьих, запустит и подключит к автопилоту головку самонаведения ракеты.
И вот о головке самонаведения мы теперь и поговорим.
Самонаведение
Вывести ракету в район цели — хорошо. Но нам ещё нужно, чтобы она в цель попала. Точности командного наведения для этого явно недостаточно: оно определяет положение ракеты с ошибкой не менее километра.
Что делать? Установить на ракету телекамеру и наводить её в цель командами? Но телекамеры 1940-х громоздки и ненадёжны, видеосигнал слаб и неразборчив, а кроме того — ракета будет управляться, только пока она выше горизонта для носителя (в пределах прямого радиоконтакта). То есть на малой высоте, непосредственно перед попаданием, управления не будет.
А нам-то как раз и нужна точность в этот момент!
Можно попробовать оснастить ракету фотоконтрастным или инфракрасным самонаведением, но тут мы упрёмся в другую проблему: недостаточная надёжность сопровождения. Головка самонаведения может легко сбиться и захватить вовсе не ту цель, которая нам нужна. Кроме того, это ограничит применение ракет исключительно фото- и теплоконтрастными целями.
Поэтому мы пойдём другим путём, и поможет нам в этом биология. А именно — эксперименты специалиста по поведению животных доктора Скиннера в области обучения голубей для наведения в цель планирующих бомб «Пеликан».
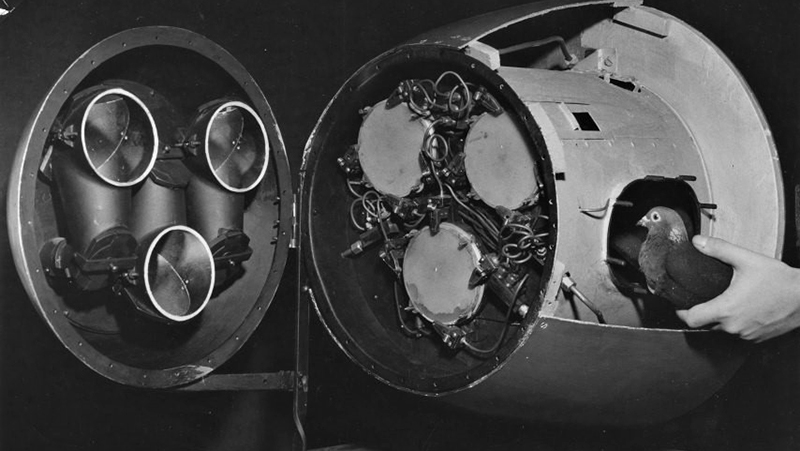
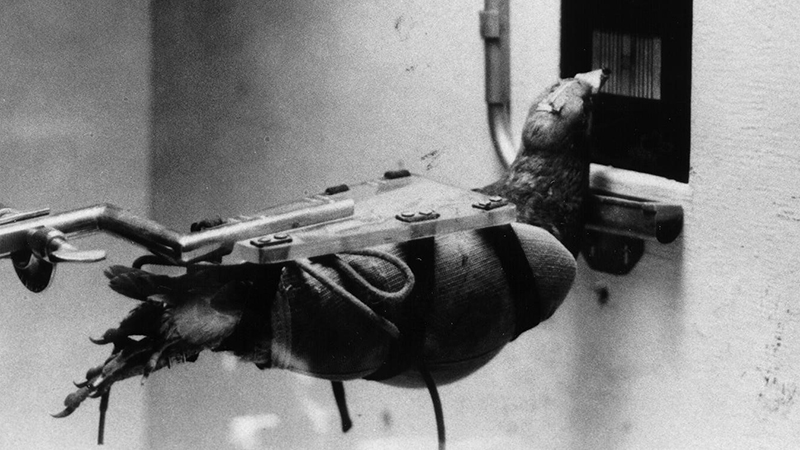
Реальная головка голубиного самонаведения. Пилот в руке слева
Голуби, при всех их недостатках, отличаются прекрасным зрением и отличной памятью. Они легко учатся находить свою голубятню даже с большой дистанции и могут узнавать объекты на фотографиях. Доктор Скиннер предположил, что голубя можно приучить долбить клювом изображение цели на специальном экране, который преобразовывал бы клевки в команды автопилоту бомбы. Хотя идея и звучит анекдотично — голубь, стуча клювом по экрану, наводит бомбу! — эксперименты показали, что она работает, и работает прекрасно.
Один из наблюдавших за испытаниями генералов в восторге воскликнул: «Черт, да это ведь точнее радара!».
Голубя сначала приучали клевать корм из отверстия в фотографии. Затем отверстие закрывали тонкой плёнкой, которую голубь должен был проклевать. Вскоре обучение усложняли — голубь должен был некоторое время колотить клювом по точке, чтобы получить корм из автоматического дозатора. Постепенно голубей приучали находить нужную точку на изображении и колотить по ней долго, непрерывно и ритмично. Полный «курс подготовки» занимал около месяца, а затем «выпускников» за несколько суток приучали работать с аэрофотосъёмкой цели.
Обученный голубь помещался в тёмную камеру-обскуру в носовом обтекателе бомбы. Изображение цели с помощью фокусирующей линзы проецировалось на «сенсорный» экран перед птицей. Когда цель находилась прямо по курсу, клевки приходились на центр экрана. А если бомба отклонялась, то изображение цели на экране смещалось — голубь начинал клевать ближе к краю. Устроена система голубеуправления была так:
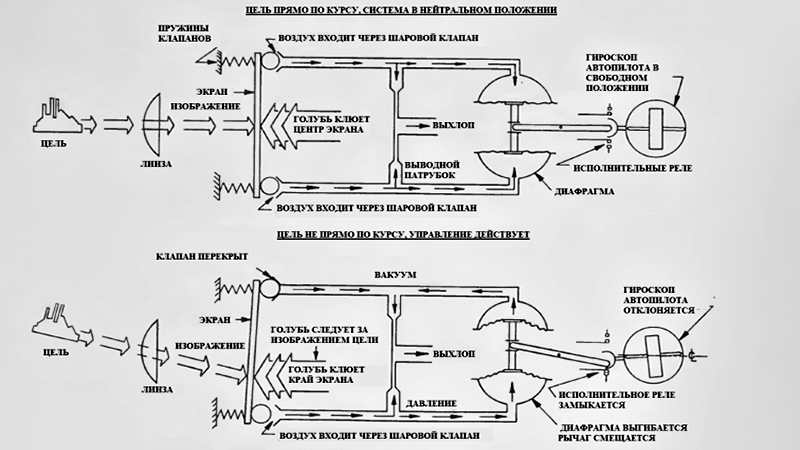
Первая итерация голубенаведения — подвижный экран с пневматическими клапанами
* В исходной версии система была пневматической. По краям экрана располагались клапаны, регулирующие давление воздуха в четырёх магистралях. Пока голубь колотил точно в центр экрана, давление во всех магистралях менялось одинаково. А вот если он начинал колотить ближе к краю, тогда клапаны с одной стороны перекрывались, с другой открывались. Баланс давления нарушался, и специальный механизм смещал рамку гироскопа.
* В более поздней версии (ORCON), созданной уже после войны, экран покрыли тонкой сеткой проводов, а на клюве голубя установили электрический провод. Когда голубь задевал клювом экран, контакт замыкался, и в зависимости от того, какая именно пара проводов (вертикальный и горизонтальный) оказалась под током, такая команда и поступала в автопилот.
Более поздняя итерация — проводящий экран вместо пневматики
Вот такой системой мы и оборудуем нашу ракету. Конечно, она тоже не лишена недостатков — может применяться только по предварительно разведанным целям и только в дневное время. Но… во-первых, настоящий «Томагавк» тоже поначалу мог применяться только по заранее сфотографированным целям. Во-вторых, обнаружить и сбить что-то настолько мелкое, как наша ракета, будет очень-очень непросто даже днём.
Применение
Итак, как же будет применяться наша ракета?
Для начала надо выбрать подходящие цели и получить их фотоснимки разного масштаба с помощью воздушной разведки. Фотографии будут использованы для обучения пернатых пилотов узнавать конкретную цель. На это потребуется не более двух-трех днёй.
Вот как-то так примерно
Затем корабль, наземная ракетная часть или тяжёлый бомбардировщик доставят ракету с обученным голубем внутри в радиус досягаемости от цели и запустят её. После запуска оператор на борту носителя будет отслеживать полёт как метку на радаре. Командами «вправо» и «влево» он сможет удерживать ракету на курсе: направление на цель и дистанция до неё уже известны, и всё, что потребуется, — это следить, чтобы ракета не слишком отклонялась от нужного пеленга.
Когда ракета окажется примерно в районе цели, оператор подаст команду «переход на самонаведение». Ракета отключит и сбросит двигатель, превратившись в планирующую бомбу, и перейдёт с командного наведения на самонаведение, открыв заслонку в камере с голубем. Голубь отыщет на проецируемом изображении местности цель, которую был обучен узнавать, и начнёт колотить по экрану клювом, тем самым удерживая ракету на курсе.
Точность голубиного самонаведения в сочетании с высокой манёвренностью планирующих бомб проекта SWOD позволит с высокой вероятностью ожидать прямого попадания.
А прямое попадание полутонной авиабомбы достаточно, чтобы разрушить или нанести тяжёлые повреждения подавляющему большинству целей: от фабричных цехов до мостов.
Вот таким простым и элегантным способом, используя только доступное, серийно производившееся в 1944 году оборудование, мы получим компактную крылатую ракету, способную пролететь более 100 километров и точно поразить заданную цель. И всё это, повторюсь, используя только реально существующие, отработанные и известные в 1940-е годы технологии и концепты.
И никакому попаданцу такая идея ни за что не пришла бы в голову.





