
Небольшая справка. Беспилотник «Swallow» был разработан британскими инженерами Невилом Шутом и Барном Уоллесом — теми самыми, которые работали над жесткими дирижаблями серии R-100 и множеством других проектов. Разработали его на основе ранее придуманного Невилом Шутом ракетного планера-мишени (на среднем фото в посте коллеги Пашолока именно он):
Посмотреть обсуждение, содержащее этот комментарий

Эти беспилотные дроны предназначались для обучения зенитных расчетов, делались компаниями, занимавшимися производством авиамоделей, запускались с переносной торсионной катапульты и поддерживали полет с помощью 1-дюймового модельного ракетного двигателя. Автопилота не было; курс и высота полета задавались установкой рулей и крыла перед запуском.

А вот как он выглядит на современных фотографиях (сохранившийся комплект):


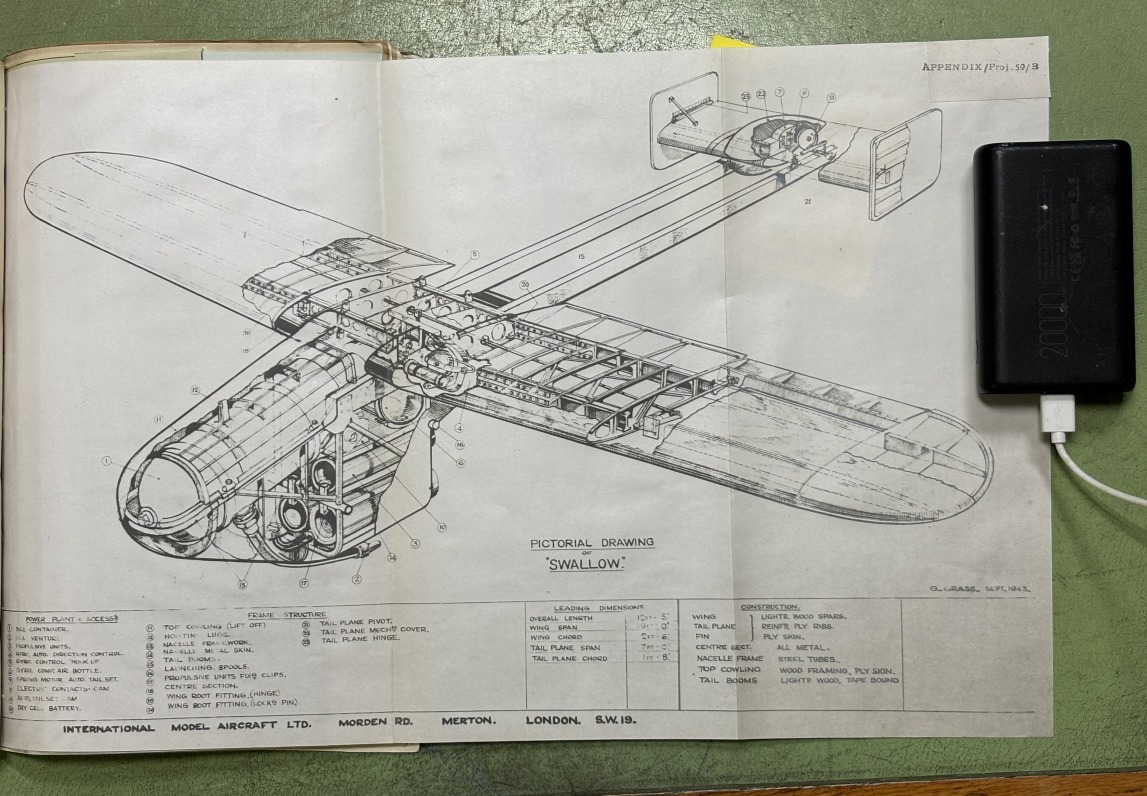
«Swallow», предложенная Уоллесом, проработанная Шутом и изготовленная инженерами «международной модельной компании» (IMA, International Model Company, известная авиамоделями серии «Frog») была более крупным ракетным планером с подвижными рулями (приводимыми в движение электромоторами), простеньким автопилотом и «программируемым» посредством часового механизма управлением. Ее полет обеспечивался тремя авиамодельными ракетными двигателями. В качестве полезной нагрузки она снаряжалась дымогенератором с химической смесью для постановки дымовой завесы.
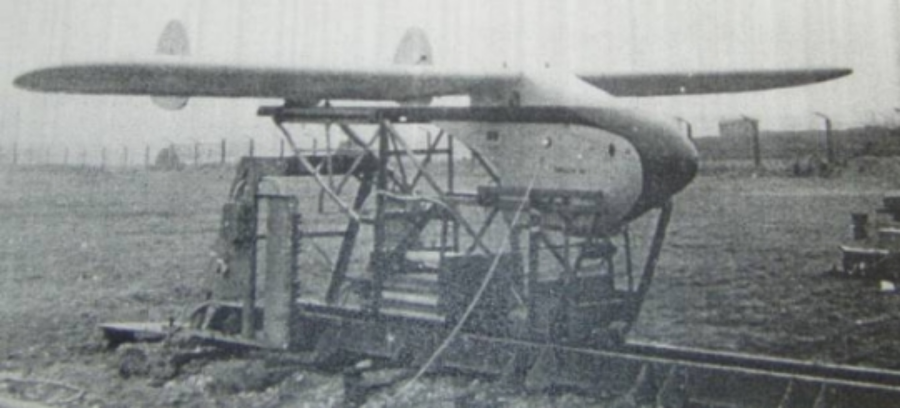
Идея Уоллеса была в том, что такие планеры — запускаемые с десантных кораблей — могут использоваться для быстрой и безопасной постановки дымовой завесы. Запущенная с переносной катапульты «Свэллоу» летела вперед, затем срабатывал часовой механизм, планер поворачивал и шел под углом 90 градусов к прежнему курсу — распыляя дымовой агент и выставляя плотную дымовую завесу перед десантными кораблями.
Испытания «Swallow» начались в 1943 году, и подтвердили работоспособность концепции. Но ввиду проблем с системами управления, отработка дрона затянулась, и он не был готов к моменту высадки в Нормандии летом 1944. После этого программу закрыли.





