
В продолжении темы поднятой в посте — Боевой робот для армии России. Предыдущая работа, на мой взгляд, как паровоз с ногами, очень сложный и очень тихоходный. Предлагаю альтернативу ещё один вариант боевого робота.
Тема подавалась на конкурс "Челенжер" программы "ДАРПА" в марте 2007года.
В ответ предложили найти руководителя, гражданина США, который будет представлять команду, иначе ну никак, хотя и интересно.
Меня это не совсем устроило.
Правда, не смотря на гарантии "не раскрытия ", через пол года я узнаю, что такой принцип управления, причем в том же, как и поданный в "ДАРПА" — слегка обрезанном по сравнению с патентной заявкой варианте, был предложен фирмой "Дженерал Динамик" для управления беспилотным дроном.
Моя авторская заявка была еще действительна и я послал в эту фирму письмо с предупреждением, что они нарушают мои авторские права.
Если учесть, что я никогда не имел никаких ни официальных, ни не официальных дел с "Дженерал Динамик" — ответ более чем интересный.
Канадский патентный офис, как только узнал, что проблемы возникли с фирмой работающей на мин обороны США, тут же ушел в подполье и дальше моя с ним переписка на эту тему зависла.
Информация в газетах об этом дроне исчезла.
Недавно я узнал, что такой ударный дрон, не имеющий аэродинамических поверхностей и управляемый с помощью гироскопического эффекта, имеющего управляющий элемент, работающие на опорный слой, проходит испытания в армии США….. представляется все тоже "дженерал динамик"…..
Итак, патентная заявка называлась —
«Моноколесная конструкция автономного или дистанционно управляемого самоходного устройства ….. использующая для управления и стабилизации движения систему гироскопов, в которых нагрузки, возникающие в процессе работы, полностью компенсируются в газо или жидкостно опорных подшипниках» — как рабочий принцип самоходного устройства;
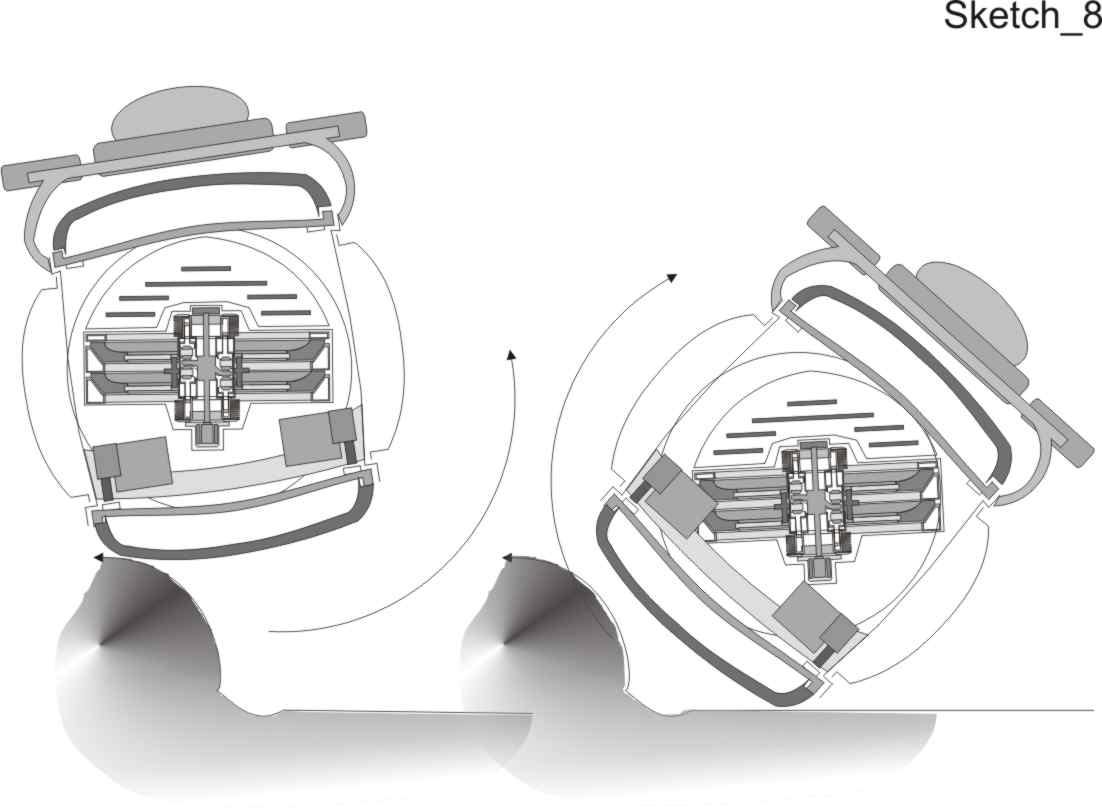
Для управления и стабилизации движения предлогается концепция управления с помощью гироскопов, способных осуществить как статическую так и динамическую стабилизацию устройства, касающегося опоры или взаимодействующего со средой любой, произвольно выбранной точкой устройства (Приложение1 Sketch_7, 8) — как концепция управления самоходного устройства;
"Использование для управления и стабилизации движения систему гироскопов, в которых нагрузки, возникающие в процессе работы, полностью компенсируются в газо или жидкостно опорных подшипниках" — как рабочий принцип управления самоходного устройства;
"Полная компенсация разрушающих нагрузок, возникающих в процессе работы гироскопа, посредством газо или жидкостно опорных подшипников, " — как метод, повышающий рабочие параметры гироскопов;
"Гироскоп, в котором нагрузки, возникающие в процессе работы, компенсируются в газо или жидкостно опорных подшипниках и ротор гироскопа является конструктивным элементом этого подшипника" — как самостоятельное устройство;
"Устройства, выполненные с использованием выше описанного гироскопа" — как самостоятельный продукт;
"Cамоходное автономное или дистанционно управляемое устройство, выполненное с использованием выше описанных предложений" — как самостоятельный продукт.
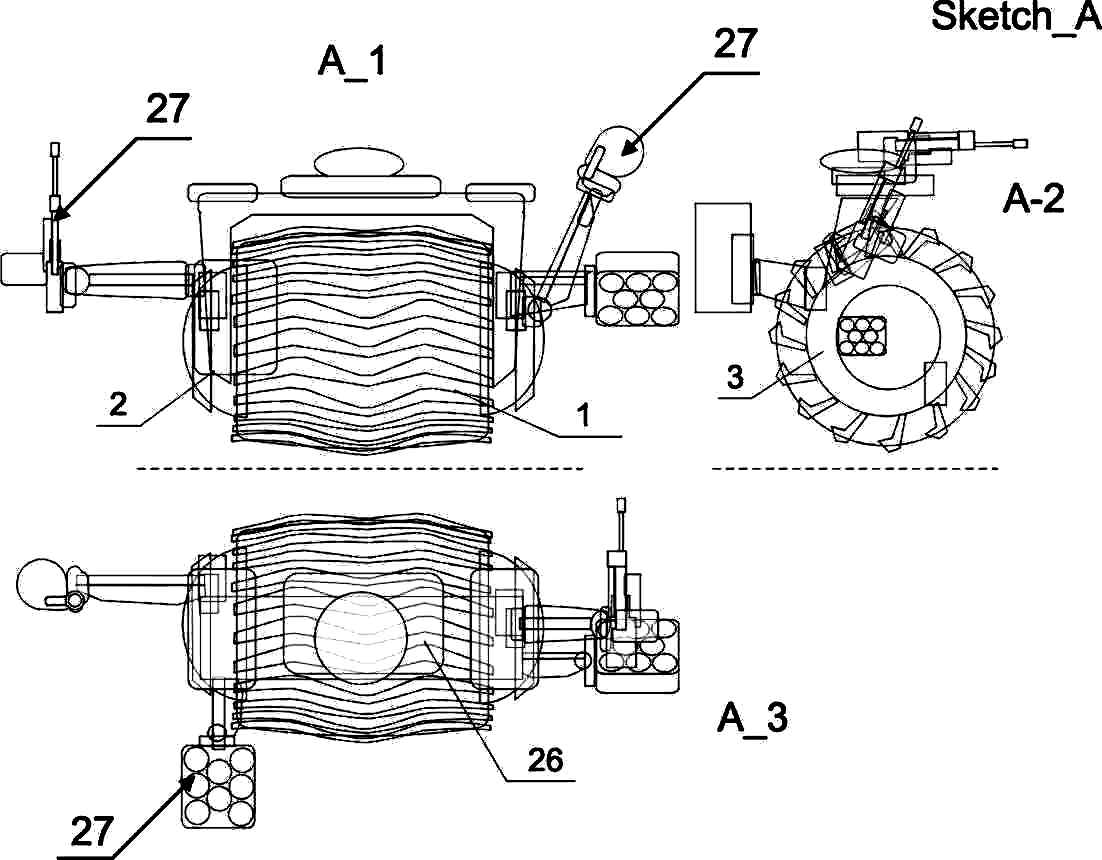
Устройство представляет собой моноколесную конструкцию без внешнего корпуса и состоит из диска с арочной камерой низкого давления и рабочего оборудования .
Все оборудование, непосредственно обеспечивающее движение устройства, расположено внутри диска.
Все исполнительное оборудование расположено на торцевых крышках диска или на рабочей платформе.
На рабочей платформе могут быть расположены датчики системы управления и дополнительное оборудование. Рабочая платформа крепится к одной или обеим торцевым крышкам и охватывает устройство как арка.
Sketch_A: A_1 — вид спереди; A_2 — вид с боку; A_3 — вид сверху.
Оборудование, непосредственно обеспечивающее движение устройства выполнено, как функциональнй модуль, расположенный внутри диска колеса.
В процессе движения, стабилизированный в пространстве модуль вращает колесо вокруг себя. В процессе управления движением, модуль изменяет положение диска относительно своей стабилизированной оси.
Модуль состоит из: двигателя и гироскопического стабилизатора, выполненных коаксиально в едином суб модуле; привода, вращающего колесо вокруг модуля; вспомогательного оборудования.
Sketch_1; Sketch_2: 1 —
арочная камера; 2 — диск колеса; 3 — энергоблок; 4, 7 — модуль гиростабилизатора_рекупиратора; 5 -привод главного движителя; 6 — вспомогательное оборудование; 8 — двигатели привода; 9 — шасси модуля; 10, 11, 12 — крышка рабочего отсека; 26 — рабочая платформа.
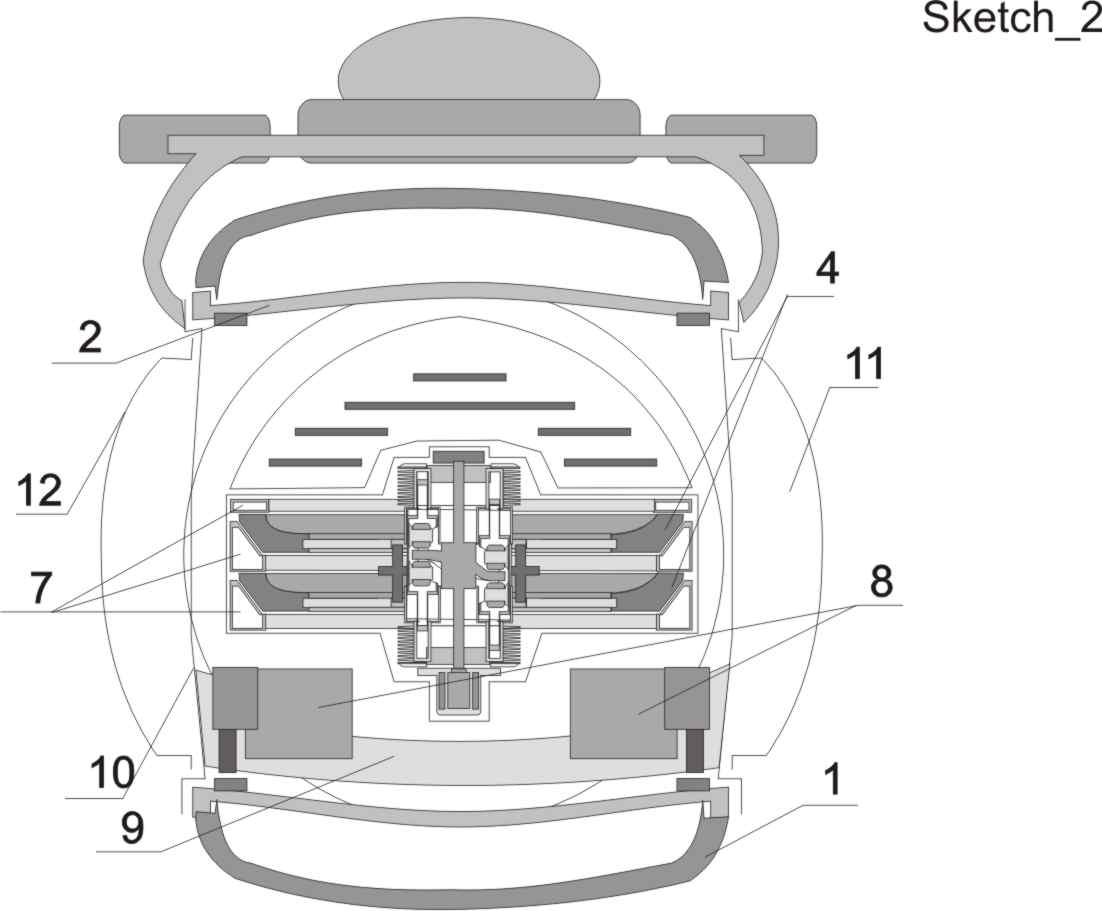
Стабилизация модуля в пространстве по трем осям, необходимая для обеспечения всех параметров движения осуществляется гироскопическим стабилизатором.
Для выполнения линейного движения устройства, модуль вращает диск колеса посредством привода, кинематически связанным с направляющими, расположенными на диске.
Для стабилизации устройства в вертикальной плоскости и изменении направления движения, модуль изменяет взаимо положение оси вращения колеса по отношению к одной или нескольким осям гиростабилизации модуля.
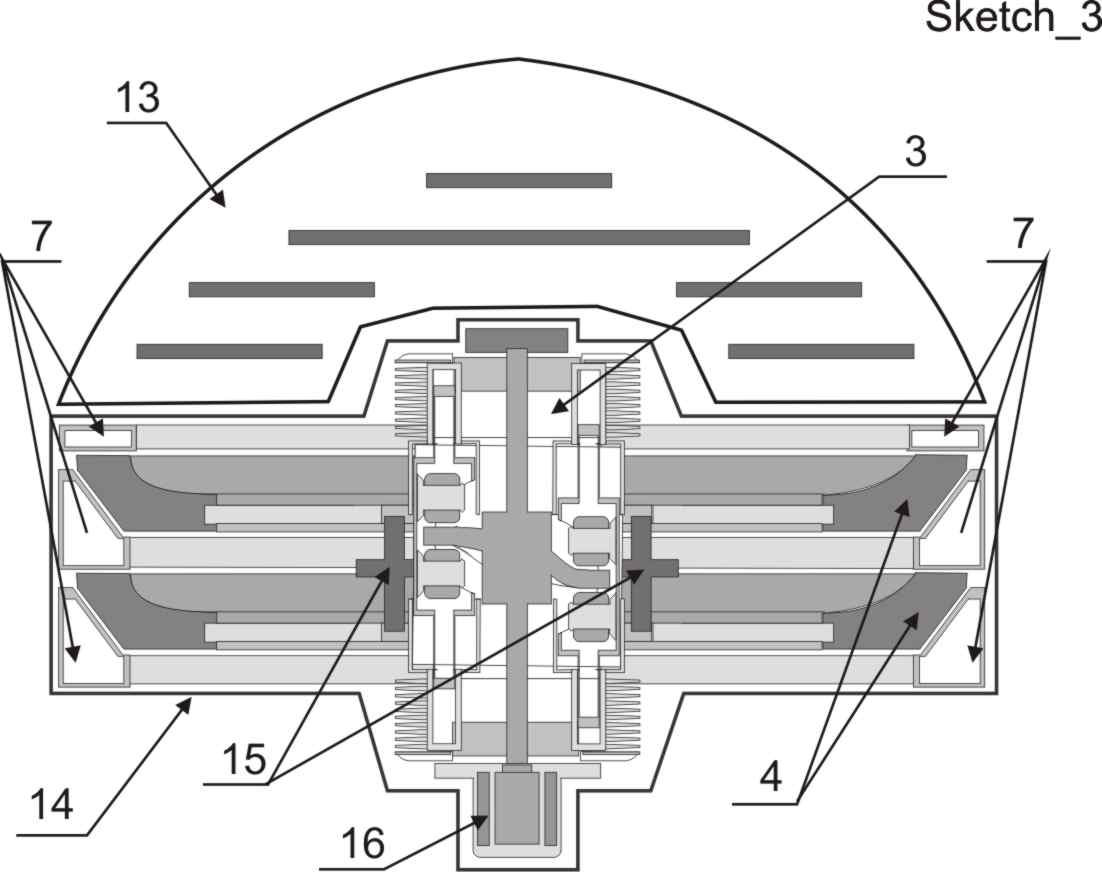
Гироскопический стабилизатор состоит из системы гироскопов, имеющих общую физическую ось.
Для обеспечения необходимых рабочих параметров гироскопов, разрушающие
нагрузки, возникающие при их работе, компенсируются в газо или жидкостно опорных подшипниках. Корпус гироскопа и внешний обод ротора гироскопа являются составными частями подшипника. Генератор опорного слоя является конструктивным элементом корпуса гироскопа. Генерируемый опорный слой противодействует нагрузкам, возникаюшим в роторе и передает их на корпус гироскопа.
Sketch_3: 4 — маховики гироскопов; 7 — генераторы опорного слоя; 14 — корпус гироскопа; 15, 16 — энергоблок и привод-синхронизатор гироскопов.
Возможны два варианта поворота или их комбинации. 1 — Независимо от наличия факта движения колеса — Поворотом всего устройства вокруг физической оси гироскопов за счет воздействия на гироскопы с разными направлениями вращения. 2 — Во время движения колеса — плавным поворотом, за счет наклона всего устройства относительно физической оси системы гироскопов (Колесо арочной формы при наклоне одновременно катится по грунту и центральной и боковой частями разного диаметра — то есть — за счет различной радиальной скорости в двух точках колеса, контактирующих с грунтом, происходит изменение троектории движения).
Устройство может оснащаться вооружением или рабочим оборудованием и системами контроля и управления, обеспечивающими выполнение рабочих функций.
Где может использоваться такой принцип!?
1 — Самоходные автономные или дистанционно управляемые устройства.
2 — Роботизированные устройства различного назначения
3 — Модули для систем стабилизации движения
4 — Гироскопы в который разрушающие нагрузки, возникающие при работе, компенсируются в газо или жидкостно опорных подшипниках
5 — Физические приборы в которых требуется высокая скорость вращения ротора или ротор работает в условиях, экстремальных для его конструкционного материала,
Примеры использования патента.
Предпологаемый дизайн военного штурмового робота.
Sketch_A;Sketch_1; Sketch_2:
Предпологаемый вес заряженного устройства — 300-800кг. Предпологаемый диаметр колеса — 1.4-1.6 метр.
Военный штурмовой робот предназначен для преодаления противодействия противника в автономном режиме или дистанционно управляемым. Робот (далее именуемый устройство) приспособлен для движения по пересеченной местности со скоростью, превышающей скорость движения противника по аналогичному ландшафту. Устройство способно преодолевать препятствия любого типа, имеющие высоту до половины диаметра колеса (ниже приведена методика преодоления препятствий с граничными параметрами). На устройство устанавливается комплект оружия и оборудования, обеспечивающее выполнение поставленной задачи. Управление и стабилизация устройства выполняется посредством гироскопического модуля. В качестве источника энергии используется дизельный, свободно поршневой генератор сжатого воздуха, выполненный как единый узел с гироскопами.
Предпологаемый дизайн гироскопического модуля военного штурмового робота.
Sketch_3; Sketch_4:
Гироскопический модуль военного штурмового робота преднозначен для: компенсации моментов, возникающих при работе двигателей; управлениея направлением движения, стабилизации и управления положением устройства в пространстве; обеспечения энергией двигателей.
Модуль состоит из: гироскопического узла; механизма синхронизации и разгона гироскопов; энергоблока.
Гироскопический узел состоит из нескольких гироскопов (в данном варианте из двух). Обод каждого гироскопа, совместно с конструктивными элементами корпуса, образует газо или жидкостно опорный подшипник (в данном варианте — воздушно опорный). Опорный подшипник компенсирует разрушающие нагрузки возникаюшие в роторах и передает их на корпус гироскопического узла. Компенсация происходит за счет подачи рабочего вещества (в данном случае воздуха) в зазор между ротором и внешними элементами опорного подшипника. Внешние элементы опорного подшипника могут быть: как неподвижно закрепленными на корпусе так и подвижные.
В следствии высокой скорости вращения и при выполнении маневров, ротор деформируется. В результате деформации не симметрично меняются зазоры между отдельными частями ротора и внешней обоймой подшипника. При изменении зазора, давление рабочего вещества между ротором и внешней обоймой в точке приложения сил меняется.
Изменение давления меняет силу, с которой рабочее вещество давит на ротор в точке изменения зазора.
Форма ротора и обоймы выбрана так, что изменение силы противодействует деформации ротора.
Механизм синхронизации и разгона гироскопов служит для разгона гироскопов их синхронизации или перераспределения энергии между ними. Перераспределение энергии между гироскопами, вращающимися в противоположных направлениях, служит для поворота устройства.
Например — торможение гироскопа, вращающегося по часовой стрелки и / или ускорение гироскопа вращающегося против часовой стрелки вызывает поворот всего устройства по часовой стрелки.
Механизм синхронизации и разгона гироскопов может быть: механический; электромеханический; с использованием жидкого или газообразного рабочего вещества.
В данном случай это механический вариант — планетарная передача.
Энергоблоком служит газотурбинный двигатель или двигатель внутреннего сгорания (в данном случае двухтактный, свободный роторно-поршневой дизель с прямоточной продувкой избыточным давлением).
Энергия от двигателя к потребителям передается с помощью: механической транссмиссией; электро-механической трансмиссией; посредством рабочего вещества или комбиникованный способом.
В данном варианте передача мощности от энергоблока комбинированная: 70% мощности двигателя передает потребителям свободно-поршневой генератор сжатого воздуха; 30% мощности двигателя передает потребителям электромеханическая передачей — в виде электроэнергии для внутренних потребителей и механически передаваемой мощности требуемой для обслуживания работы гироскопов.
Гироскопы могут работать как накопители для режима пикового превышения рабочей мощности.
Приложение 1(sketch_7) — Способ прохождения припятствий устройством, спроектированным с использованием выше описанных ипринципов.
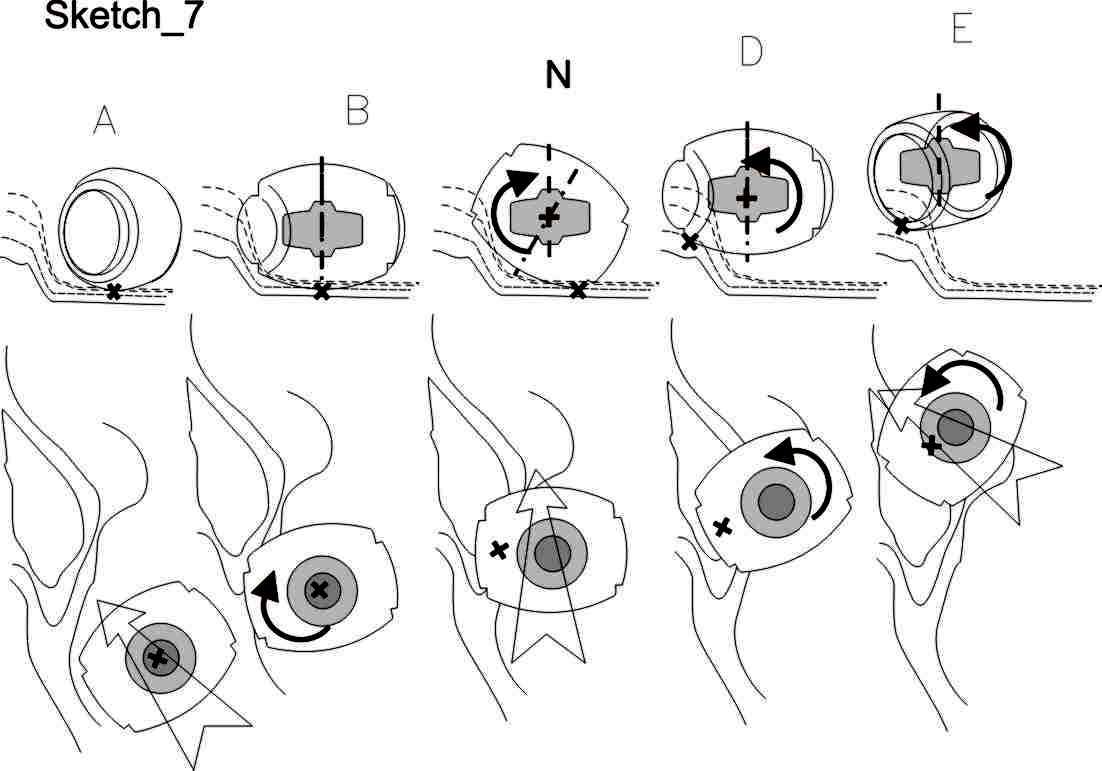
Для прохождения припятствий используется способность гироскопического модуля обеспечивать как статическую так и динамическую стабилизацию устройства, касающегося опоры любой, произвольно выбранной точкой камеры.
Подойдя к припятствию (view_A), устройство разворачивается так, что горизонтальная ось устройства и касательная к рельефу припятстви образуют угол 45'(view_A->B).
За счет переориентации вертикальной оси гироскопа, устройство поднимает одну из своих сторон опираясь на противоположную сторону и наезжает поднятой стороной на препятствие(view_ B->C).
Устройство опираясь на наехавшую на припятствие сторону поднимает противоположную сторону и наезжает ей на препятствие(view_D->E).
Если препятствие преодолено, устройство разворачивается по маршруту движения.
В случае необходимости продолжить преодоления препятствия, цикл повторяется(view_E->).
Подобная методика позволяет устройству преодолевать вертикальные стенки до половины диаметра колеса (при планируемом диаметре колеса военно-штурмового робота — 1.6m, высота преодолеваемого припятствия — 0.8m) или преодолевать завалы (obstruction) и горный ландшафт эквивалентный каскаду (лестнице), состоящей из отдельных элементов высотой и шириной до половины диаметра колеса.
Источник — http://samlib.ru/k/koganickij_g_a/shturmowojrobot.shtml



