
Поэкранопланим или не все монстры с Каспия
Воздух — союзник скорости»: под таким многозначащим заглавием в 1972 г. (№ 37) i сборнике была напечатана содержательная статья — глава из книги знаменитого Ренато Леей. Действительно, как только реальные скорости движения на воде достигли определенной величины (скажем, 50—60 км/ч), стало очевидно, что энергию встречного воздушного потока, создающего сопротивление, можно и нужно использовать, что с помощью аэродинамических сил можно но только уменьшить гидродинамическое сопротивление, но и полностью поднять быстроходное судно над водой.
В принципе энерговооруженность современных глиссирующих гоночных судов уже такова, что стало гораздо сложнее добиться устойчивого движения и постоянного контакта с водой, чем обеспечить свободный полет судна над поверхностью воды (не случайно же ставят иногда небольшое воздушное крыло, которое не поднимает, а, наоборот, прижимает глиссер к воде!). Думается, что пришла пора более серьезно обратиться к идее использования аэродинамической подъемной силы не только на чисто скоростных, но й на прогулочных судах.
Энерговооруженность даже обычных прогулочно-туристских мотолодок, испытывающих сопротивление воды (в 800 раз более плотной, чем воздух, несжимаемой— создающей еще и волновое сопротивление), находится на уровне, вполне сравнимом с аналогичными показателями самолетов. Действительно, удельная нагрузка в килограммах веса на 1 л. с. установленной мощности практически одинакова, например, у мотолодки «Крым» (ПМ "Вихрь-30", водоизмещение 320 кг) и у широко известного «ПО-2» (125 л. е., полетный вес 1350 кг).
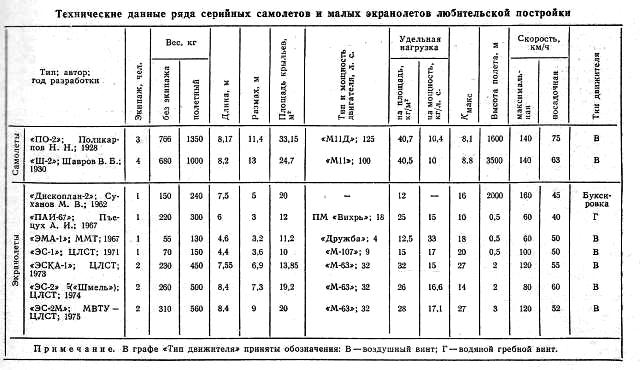
Как уже не раз отмечалось в сборнике (см. № 15, 64, 73), наиболее перспективным путем создания летающих мотолодок представляется использование эффекта экрана. К настоящему времени в нашей стране уже накоплен известный опыт любительской постройки малых аппаратов-экранолетов, в том числе и на базе моторных лодок с воздушным винтом. Основные данные ряда аппаратов сведены в таблицу, в которой для сравнения даны и сведения по некоторым самолетам. Сопоставление дает основание для некоторых довольно интересных выводов.
Энерговооруженность даже этих самодельных эк-ранолетов в 1,5—2 раза меньше, чем самолетов (включая летающие лодки и гидропланы) с близкими скоростями полета. Это подтверждает реальность идеи создания экономичного малого экранолетаг способного двигаться по воде, как обычное судно, и летать над водой, используя эффект «динамической воздушной подушки».
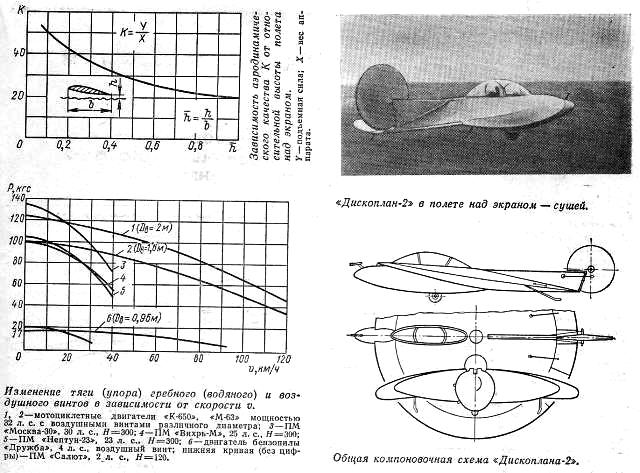
Значение аэро- или гидродинамического качества Kt которое является наиболее обобщенной характеристикой рассматриваемых видов аппаратов, у экранолетов в 1,5 раза больше, чем у самолетов (и, добавим, в 3—4 раза больше, чем у прогулочио-туристских мотолодок).
Напомним, что чем ближе крыло расположено к экранирующей поверхности, тем больше подтормаживается набегающий поток воздуха, тем больше растет давление, а вместе с ним и подъемная сила; индуктивное сопротивление из-за уменьшения перетекания воздуха падает. При значительном приближении движущегося крыла к экрану значение К повышается в 2— 3 раза! Отметим еще, что влияние экрана сказывается лишь при высоте полета меньше хорды (ширины) крыла.
Практическая сложность создания экранолета состоит в том, что с приближением крыла к экрану точка приложения подъемной силы (центр давления—* Ц. А-) перемещается к задней кромке профиля в результате повышения давления под крылом вдоль хорды и разрежения у передней кромки крыла. Это перемещение приводит к большим трудностям при про* дольной балансировке и является едва ли не главным препятствием на пути создания экранолета. В 1964 г. немецкому авиаконструктору А. Липпишу путем применения крыла сложной формы, положение ц, д, которого мало менялось при различных расстояниях до экрана и углах атаки, удалось более или менее удовлетворительно решить проблему продольной стабилизации без ухудшения аэродинамического качества.
Испытания моделей, созданных нашими энтузиастами, показали, что устойчивость малого аппарата относительно продольной оси может быть обеспечена и при других формах крыла. Приведем краткие описания некоторых из этих моделей.
«ДИСКОПЛАН-2». В 1962 г. под руководством М. В. Суханова был разработан и испытан несамоходный — буксируемый экспериментальный аппарат, имеющий крыло круглой в плане формы и потому названный «Дископланом».
На всех режимах полета аппарат показал хорошую устойчивость и управляемость. При движении над экраном было отмечено К = 16; при свободном же полете значение К падало вдвое.
Управлялся «Дископлан» при помощи руля поворота и элевонами, совмещающими функции руля высоты и элеронов. Крыло имело отклоненные вниз концевые кромки и тонкий вогнутый профиль, что б сочетании с круглой формой в плане (удлинение —1,27) способствовало увеличению экранного эффекта. Вообще можно было сделать вывод, что круглое крыло имеет при движении вблизи экрана некоторое преимущество перед крыльями другой формы.
Приближаясь к земле, пилот ощущал сильное влияние экрана, которое автоматически стабилизировало «Дископлан» в продольном и поперечном направлениях; можно было даже бросить управление.
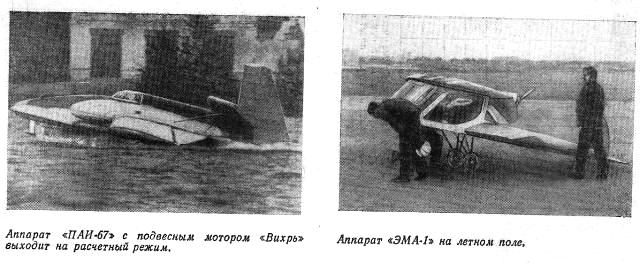
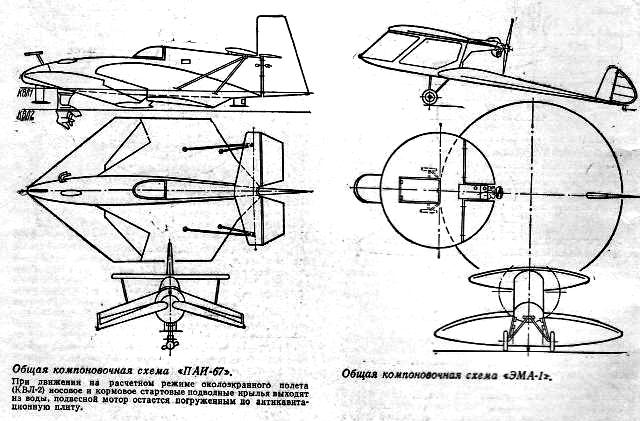
«ПАИ-67». Пятью годами позже —в 1967 г.— А, И. Пъецух им был разработан и испытан экраноплан? «ПАИ-67» представляющий довольно оригинальный вариант аппарата.
С установленным в носовой части серийным подвес-мотором «Вихрь» (с полированным гребным винтом; Н « 350) экранолет через 12—15 с разгона выходил из воды и легко развивал скорость 60 км/ч. Таким образом эта оригинальная машина в режиме экранного полета легко обгоняла обычные мотолодки с таким же мотором (имевшим тогда, кстати сказать, мощность не 20, а порядка 18 л. е.). Конструктор «ПАИ-67» на деле доказал, что даже небольшие несущие поверхности за счет снижения гидродинамического сопротивления могут заметно повысить скорость глиссирующей мотолодки.
Для быстрого вывода аппарата на расчетный режим использовались стартовые подводные крылья (размах крыла —0,8 м, хорда — 0,15 м). На крейсерском расчетном режиме они оказывались выше уровня воды ка 0,1 м и не мешали движению. Рупи поворота размещались на стойках кормового подводного крыла.
Любопытную конструкцию имел стабилизатор: он был сделан несущим, а для повышения эффективности— еще и управляемым. По мере выхода на экранный режим угол установки его увеличивался. Для компенсации перемещения ц. д. стабилизатор отклонялся на положительные углы атаки до 3CF. Крен создавался рулем высоты, правая и левая части которого могли отклоняться дифференциально.
Испытания «Г1АИ-67» подтвердили целесообразность применения даже на самых легких лодках-экранолетах не водяных гребных винтов, а воздушных, винтов. Достоинства воздушного винта очевидны: это возможность достижения больших скоростей, обеспечение амфибийных качеств аппарата, удобство эксплуатации установки. Явление кавитации обычных гребных винтов, резко уменьшающее их КПД, начинает сказываться. уже на скорости 60—80 км/ч; сопротивление подводной части подвесного мотора не таких скоростях составляет более 50% от общего сопротивления (у «ПАИ-47», например, общее сопротивление на крейсерской скорости равнялось 30 кгс, а сопротивление подводной части «Вихря» составляет 16 кгс).
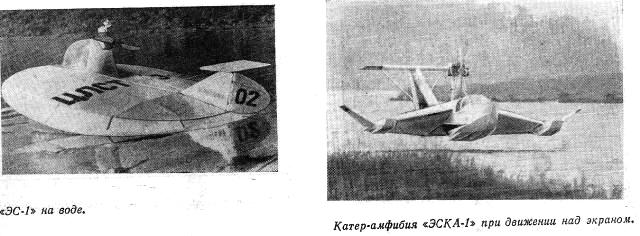
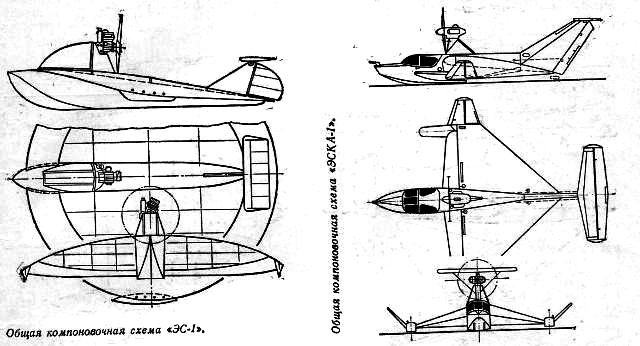
«ЭМА-1». Одновременно с «ЛАИ-67» студентами Московского машиностроительного техникума разрабатывался надземный аппарат «ЭМА-1» с воздушным винтом, который работал от двигателя мощностью 4 л. с. (от бензопилы «Дружба»). Экранолет был выполнен по схеме «уткав и имел двухлонжеронное крыло круглой в плане формы. Перед крылом (на 1 м впереди и на 0,8 м над ним) был расположен несущий стабилизатор с элевонами большой площади. Толкающий винт, расположенный за кабиной пилота, разразработан и изготовлен экранолетный стенд «ЭС-1», корпус которого представлял собой лодку с плоским днищем и резким подъемом скулы в носу. Такие обводы были выбраны потому, что испытания предполагалось проводить, в основном, при движении по льду и снегу.
Крыло было выполнено комбинированным. Цент-рольной жесткой масти крыла диаметром 2,7 м задан плоско-выпуклый профиль с относительной толщиной 6%. К жесткому крылу пристыкована гибкая кольцевая поверхность из листового полиэтилена, увеличивающая диаметр крыла до 3,6 м. Угол установки жесткого крыла равнялся 10э, а эластичной передней кромки — 0*. Таким образом, жесткое крыло с эластичной периферийной поверхностью имело вогнутый профиль. По концам крыла эластичная поверхность отгибалась вниз под углом 30° для создания эффекта концевых шайб.
Аппарат имел Т-образное хвостовое оперение и полностью поворачиваемый стабилизатор; элероны отсутствовали. Управлять по крену можно было рулем поворота.
За фонарем кабины пилота располагался двигатель М-107.
В шестидесятые годы за рубежом были проведены исследования по определению оптимальной формы
крыла, использующего эффект близости экрана. В частности, в 1964 г. в журнале «Luftfahrttechnik» сообщалось о несущей поверхности, образованной телом вращения, причем для удобства расчета и анализа его горизонтальная плоскость симметрии была заменена экраном. Двигаясь поступательно, такая несущая поверхность, которая напоминает перевернутую половину воронки, создаст подъемную силу, равную произведению скоростного напора на площадь основания поверхности полукиля. Многочисленные зарубежные патенты, неоднократные эксперименты А. Липпиша и ого патентные разработки, надо полагать, выполнены с учетом результатов указанной работы.
Данные материалы и приобретенный опыт постройки ряда экспериментальных экранолетов использовались при разработке а ЦЛСТ спасательного катера — экранолета «ЭСКА-1», который был изготовлен и испытан в 1973 г. (подробнее — см. «КЯ» № 73 и журн. «Техника— молодежи» 1974 г., № 12).
«ЭСКА-1*. Этот катер-экранолет с куполообразной несущей плоскостью упрощенной (спрямленной) формы показал себя как устойчивая и хорошо управляемая машина, при испытании которой были получены высокие скоростные и маневренные характеристики и солидная грузоподъемность, а также подтверждена возможность использования аппаратов такого типа для спасательных целей.





