Автомобили для бездорожья. Плавающий транспортер ЗИЛ-135Б
Проектирование артиллерийского тягача ЗИЛ-134 и транспортера ЗИЛ-134А на его базе, а также постройка двух опытных образцов ЗИЛ-134 и их заводские испытания (см. Автомобили для бездорожья. Средний артиллерийский тягач ЗИЛ-134) выявили серьезные трудности в создании и доводке работоспособного V-образного 12-цилиндрового двигателя, а также очень большую сложность трансмиссии и ходовой части. Это могло вызвать в дальнейшем не только длительную доводку конструкции и проблемы в наладке производства, но и значительные трудности в эксплуатации, обслуживании и ремонте. Кроме того, наличие торсионной подвески при четырехосной схеме и установка шин сверхнизкого давления привели к излишней комфортабельности, неоправданной назначением автомобиля.

Поэтому в СКБ ЗИЛ одновременно с работами по ЗИЛ-134 выполнили ряд компоновок нового плавающего автомобиля ЗИЛ-137 (потом названного ЗИЛ-135), коренным образом отличающегося от ЗИЛ-134 своей сравнительной простотой, бортовой системой привода колес, использованием двигателей, предполагаемых к постановке на производство ЗИЛ и обладающего рядом тактических преимуществ. По замыслу главного конструктора В А Грачева, многоцелевой автомобиль ЗИЛ-135 должен быть одинаково хорошо преодолевать как бездорожье, так и водные преграды, т.е. стать действительно автомобилем высокой проходимости — «вездеходом».
Над плавающим транспортером ЗИЛ-135 трудились конструкторы В А Грачев, А.Г. Кузнецов, В.Б. Певцов, Б.П.Борисов, Л А Кашлакова, НА Егоров, АА Шандыбо, В.В. Пискунов, С.Ф. Румянцев, Ю,И. Соболев, А.П. Селезнев, А.И. Филиппов, В.В. Шестопалов, В. Соколова, В.А. Паренков, Ю.В. Балашов, Ю.А. Комаров, ЕА Степанова, А.Д. Андреева, С.Г. Вольский; испытатели В.Б. Лаврентьев, Г.Т. Крупенин, ГА Семенов, В.М. Андреев, В.А. Анохин, В.Я. Воронин; водители-испытатели И.Г. Катков, Е.И. Юрков.
Краткое описание конструкции
Отсутствие в отечественной автопромышленности на производстве мощных карбюраторных двигателей сделало бесперспективным любой проект автомобиля, базирующийся на подобном силовом агрегате. Поэтому в ЗИЛ-135 сначала решили установить два двигателя ЗИЛ-120ВК, являющегося развитием массового 6-цилиндрового двигателя ЗИЛ-120.
Идея использования двухмоторных схем в то время была не нова. Наибольший опыт применения такой силовой установки накопил ГАЗ при создании и производстве легкого танка Т-70 и самоходной установки CУ-76M. Московский автозавод им. И.В. Сталина проводил подобные опыты при установке двух двигателей ЗИС-5М на полугусеничные тягачи АТ-8 и AT-14. Однако практика спаривания двигателей в довоенное и военное время не давала хороших результатов.
После войны, когда заводом был накоплен достаточный опыт создания гидродинамических передач, успешная установка сдвоенного силового агрегата уже не вызывала сомнений. Кроме того, удачные опыты ЗИЛа по форсированию рядного двигателя ЗИЛ-120 и появившаяся возможность постановки его на производство создали благоприятные предпосылки для оснащения разрабатываемого автомобиля мощным силовым агрегатом.
Однако добиться надежной работы двигателей ЗИЛ-120ВК так и не удалось, поэтому на новом автомобиле использовали серийные двигатели ЗИЛ-123Ф от БТР-152. Оба двигателя работали каждый на свой борт через гидродинамическую передачу. Такая схема обеспечивала надежную работоспособность, не требовала применения дифференциалов, допускала движение автомобиля в легких дорожных условиях на одном двигателе (что очень важно с точки зрения живучести автомобиля и экономии топлива) и давала большие преимущества в использовании мощности силовой установки для двух водометов. Два двигателя ЗИЛ-123Ф суммарной мощностью 220 л.с. и 65 кгс-м крутящего момента при полной массе автомобиля 15 т обеспечивали удельную мощность 14,6 л.с./т.
Фильтр грубой очистки — пластинчатый, щелевой, монтировался на левой стороне двигателя и был включен в магистраль последовательно. Фильтр тонкой очистки центробежного типа был включен в магистраль параллельно и располагался на правой стороне двигателя.
Система охлаждения (закрытая, с принудительной направленной циркуляцией) обеспечивала оптимальный тепловой режим двигателя, компрессора и гидродинамической передачи. Компоновочно система охлаждения разделялась на два одинаковых блока (для каждого силового агрегата), установленных по бортам за кабиной, и теплообменника, расположенного в носовой части корпуса. Каждый блок состоял из водяного радиатора, масляных радиаторов двигателя, гидродинамической передачи, вентилятора и водяного теплообменника.
Каждый радиатор — трубчато-пластинчатый, четырехрядный с активной охлаждающая поверхностью 30,7 м². Вентилятор шестилопастный, производительностью 2 м³/с при 2000 минˉ¹. Для запуска в холодное время года имелся пусковой подогреватель. Для отопления кабины к системе охлаждения параллельно был подключен отопитель с обогревом ветровых стекол.
Воздушно-масляный радиатор двигателя через приоритетный клапан был подсоединен к главной магистрали масляного насоса. Клапан отсекал поступление масла в радиатор при падении давления в магистрали ниже 1 кг/см². В холодное время года радиатор отключался.
Воздушно-масляные радиаторы охлаждения масла гидродинамической передачи были соединены попарно для каждого из силовых агрегатов и представляли собой раздельные системы охлаждения.
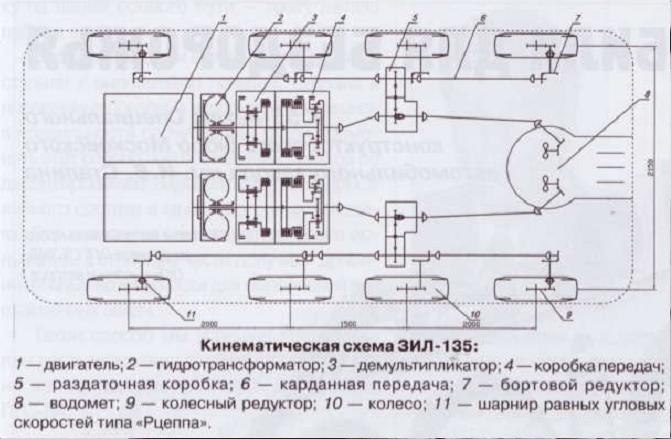
Трансмиссия автомобиля состояла из двух гидродинамических передач, карданных валов, двух раздаточных коробок, восьми бортовых передач и восьми колесных редукторов.
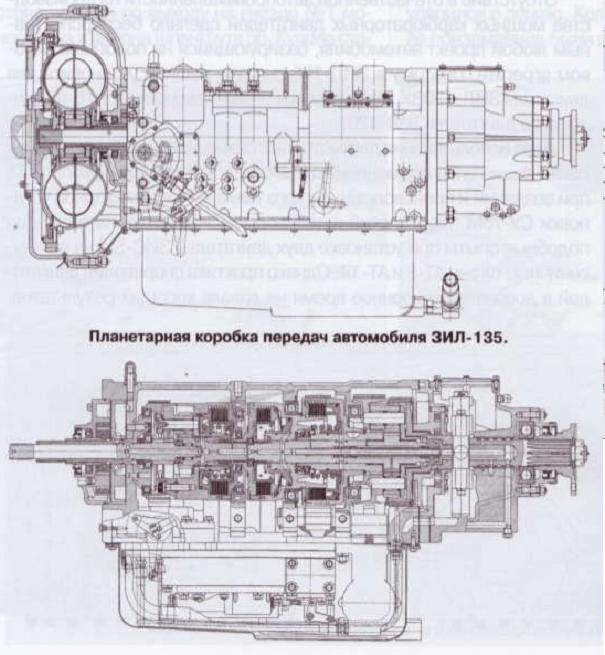
Гидродинамическая передача включала гидротрансформатор, 2-ступенчатый демультипликатор и 3-ступенчатую планетарную коробку передач с системой гидравлического управления, работавшую без разрыва потока мощности.

Четырехколесный комплексный гидротрансформатор с автоматическим переходом на режим гидромуфты состоял из насосного колеса, двух направляющих аппаратов (реакторов) с муфтами свободного хода и турбинного колеса. КПД гидротрансформатора составлял 88% в режиме гидротрансформатора при 1/j=0,8 и 95% в режиме гидромуфты при полных оборотах двигателя 2800 минˉ¹.
Расположенный между гидротрансформатором и коробкой передач 2-ступенчатый цилиндрический многопоточный демультипликатор (силовой диапазон — 1,96) с внешним зацеплением шестерен переключался вручную с помощью двух фрикционных элементов (блокировочная муфта и ленточный тормоз) без разрыва потока мощности.
Система управления гидродинамической передачи служила для необходимой подпитки гидротрансформатора, питания гидравлической панели управления переключением передач, а также системы включения колес и водометов в раздаточных коробках. Два насоса, расположенные в переднем и заднем концах гидропередачи, обеспечивали давление на всех режимах движения автомобиля. Передний насос приводился от насосного колеса гидротрансформатора, обеспечивая таким образом давление в системе при работающем двигателе. Задний насос приводился выходным валом коробки передач и обеспечивал давление в системе при условии вращения трансмиссионных валов.
Имелась возможность автоматического управления тремя передачами планетарной коробки, а также дистанционного включения демультипликатора. Необходимые точки переключения передач (в соответствии с расчетным графиком динамики автомобиля) контролировались специальными клапанами: клапаном фактора мощности двигателя, связанным с педалью акселератора, и центробежными регуляторами — факторами скорости.
При полном открытии дросселя последовательное переключение передач с 1 -й и до 3-й происходило при полной скорости автомобиля на каждой передаче. При частичных положениях дроссельной заслонки переключение с передачи на передачу осуществлялось значительно раньше в соответствии с величиной открытого водителем положения дросселя. Золотник ручного управления имел пять положений, соответствующих трем передачам вперед, нейтральному положению и заднему ходу.
Синхронность включения обеих коробок обеспечивалась клапаном одновременного управления коробками. При одновременной работе коробок командные импульсы клапана мощности двигателя и скоростные импульсы от центробежных регуляторов посылались только от одной из панелей одновременно на обе коробки. Вторая панель обеспечивала свою планетарную коробку только силовой передачей мощности.
Каждую коробку можно было включить в положение ведущей, т.е. дающей контрольные импульсы, что обеспечивало работу схемы при движении автомобиля на одном двигателе.
Силовой диапазон регулирования трансмиссии был всего 13,0, что предопределило максимальный динамический фактор 0,59 (явно мало для такой машины). Позже он был увеличен.
Автомобиль оснащался водометным движителем сдвоенного типа с наклонными валами рабочих колес. Частота вращения рабочих колес 1750 минˉ¹. Тяга на швартовых 800 кгс. Диаметр рабочего колеса 340 мм.
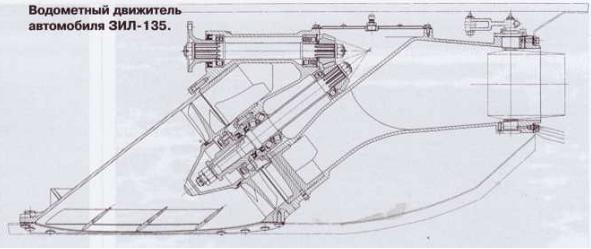
Корпус водомета имел две входные камеры. Внутри корпуса располагались два наклонных вала, на которых были установлены рабочие колеса. Каждое рабочее колесо размещалось в отдельной камере, а выходы этих камер соединялись в один общий выход.
В выходной части овального сечения корпуса устанавливались три руля, которые изменяли направление потока на выходе из водомета. За счет реакции на рулях автомобиль поворачивался на плаву. Передача мощности на наклонные валы рабочих колес водометов осуществлялась от своих раздаточных коробок. Такая компоновка обеспечивала возможность преодоления водной преграды в случае повреждения одного из двигателей, так как при этом струя воды на выходе оставалась на продольной геометрической оси машины и не требовалось подруливания, а значит не было дополнительной потери скорости на воде.
Раздаточная коробка представляла собой редуктор с передаточным отношением 1:1, позволявший передавать момент на каждую бортовую передачу и к водомету. Она состояла из трех шестерен постоянного зацепления. Ведущая шестерня имела свободную посадку на ведущем валу (возможны задиры) и при помощи зубчатой муфты могла жестко соединяться с валом. Вал привода водомета соединялся с ведущим валом раздаточной коробки отключаемой шлицевой муфтой.
Обе муфты могли быть включены одновременно или порознь. Раздаточные коробки крепились к картерам бортовых передач третьего колеса. Включение осуществлялось гидравлическими цилиндрами.
Возможны были три положения муфты в каждой раздаточной коробке: положение «Движение на суше» соответствовало включению колес, т.е. мощность подводилась только к колесам автомобиля; «Вход и выход из воды» — одновременному включению колес и водомета; «Движение на воде» — включению только водомета, колеса при этом отключались и не вращались.
Бортовые передачи — коническая пара постоянного зацепления со спиральным зубом, передаточное отношение 2,273:1. Ведомая шестерня бортовой передачи была связана шлицевым валом и шарниром «Рцеппа» с ведущей шестерней колесного редуктора (для управляемых колес). Каждый бортовой редуктор располагался в картере в корпусе машины. Привод к бортовым передачам осуществлялся от своей раздаточной коробки. Все бортовые передачи вдоль борта были связаны карданными валами.
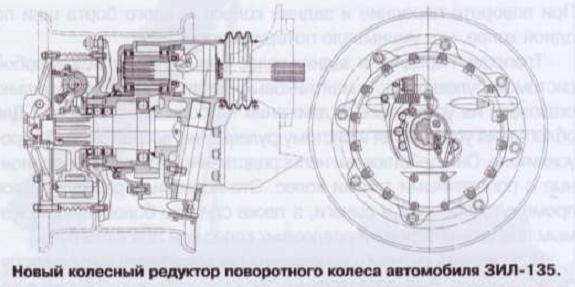
В связи с установкой на ЗИЛ-135 колес и шин от автомобиля ЗИЛ-134 колесный редуктор вначале был использован без изменений от ЗИЛ-134 — к этому редуктору не было претензий. Впоследствии он был радикально переделан.
Рулевое управление включало в себя рулевой механизм, гидроусилитель и систему рулевых тяг. На ЗИЛ-135 управление осуществлялось путем поворота колес передней и задней осей, что обеспечивало хорошую маневренность, т.е. небольшой радиус поворота при сравнительно малых углах поворота колес. Это позволило сделать раму и корпус в межколесном пространстве значительно большими по сравнению с машинами 8×8 с поворотными только передними колесами, что предоставило более широкие возможности для размещения специальных агрегатов. Так как база автомобиля была симметрична относительно середины машины, то колеса передней и задней осей поворачивались, соответственно, на одни и те же углы, но в противоположные стороны. При повороте передние и задние колеса каждого борта шли по одной колее, что уменьшало потери энергии.
Трапеции передних и задних колес были связаны между собой системой рулевых тяг и маятниковых рычагов, что положительно сказалось на устойчивости движения на больших скоростях. Для облегчения управления в систему рулевых тяг встроили два гидроусилителя. Они действовали непосредственно на рычаги, соединенные с поперечными тягами колес. Это позволило разгрузить все промежуточные тяги и рычаги, а также сделало более предсказуемым поведение задних управляемых колес при повороте руля.
Вся система рулевого управления располагалась внутри корпуса автомобиля. Вывод поперечных тяг к колесам осуществлялся через специальные вырезы в раме, а место выхода герметизировалось с помощью резиновых чехлов.
Система ножных тормозов повторяла соотвествующую систему автомобиля ЗИЛ-134. Ручной тормоз — трансмиссионный, колодочный, барабанного типа, располагался на бортовых передачах передних колес.
Система регулирования давления воздуха в шинах — централизованная и подобна аналогичной системе автомобиля ЗИЛ -134.
Электрооборудование — 12-вольтовое, с экранированным зажиганием. Зажигание на двух двигателях, работающих параллельно, предусматривало возможность отключения одного из них. При параллельной работе двух двигателей с генераторами Г-54 и реле-регуляторами РР-28 один из генераторов должен был отключаться (во избежание перегрева). Имелась возможность подключения к бортовой сети прибора ночного видения (ПВН). Предусматривалась установка рации, для чего вся система зажигания экранировалась.
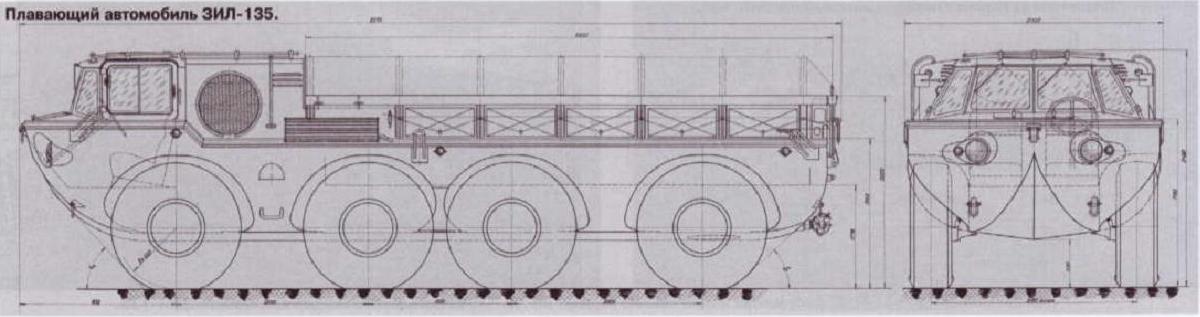
Корпус — сварной конструкции (из стального листа), водонепроницаемый, состоял из профилированных продольных балок, поперечин, шпангоутов и был обшит стальными листами. Днище в поперечном сечении имело уклон по 7,5° в обе стороны от оси машины. Для колес были выполнены ниши, служащие частью корпуса и благодаря сферической поверхности ужесточающие его.
В передней части корпуса находилась двухместная кабина с герметичной ветровой рамой и раздвижными окнами дверей. Двери герметизировались двойным уплотнением. Для сообщения с платформой и мотоотсеком в задней стенке кабины имелась дверь. В крыше кабины был выполнен люк.
В мотоотсеке, находившемся в нижней средней части корпуса, размещались двигатели, закрытые сверху крышей. Специальные воздухозаборники вентилировали воздух всего мотоотсека. Средняя часть мотоотсека над капотом служила проходом из кабины на платформу. При входе в воду при большой волне мотоотсек сверху защищался специальным тентом. Попавшая внутрь вода отводилась за борт с помощью насоса откачки.
Платформа, рассчитанная на перевозку 5 т груза, размещалась за мотоотсеком. Вдоль боковых бортов располагались деревянные доски для сидения. В проходе могла быть установлена дополнительная скамейка, с которой общее число мест достигало 30. Загрузка людей и грузов производилась через заднюю двухстворчатую герметизированную дверь. Платформа закрывалась брезентовым тентом. Все обивочные и деревянные материалы корпуса были пропитаны составом, предохраняющим от воспламенения.
Испытания
Первый опытный образец ЗИЛ-135 собрали в СКБ ЗИЛ 3 октября 1958 г.
На испытаниях ЗИЛ-135 уверенно преодолевал ров шириной 2,5 м, не говоря уже об окопах и воронках. Это стало возможным благодаря отсутствию подвески и равномерному расположению колес при увеличенной базе.

На дорогах с твердым покрытием при преодолении чередующихся с определенным шагом неровностей небольшой высоты (25 мм) выявилась склонность машины к резонансным колебаниям на скорости 17-22 км/ч, а неровностей большой высоты (100 мм) -к галопированию на скорости свыше 30 км/ч. Но в большинстве случаев автомобиль шел ровно, причем движение было возможно без двух любых колес.
Преодолению водных преград ЗИЛ-135 споссюствовал герметичный обтекаемый корпус с ложкообразными формами носа и кормы. Гладкое днище, формы обводов корпуса и небольшая по сравнению с амфибией ЗИЛ-485А осадка обеспечивали малые сопротивления при движении по воде. Установка двух водометов позволила машине развивать достаточную швартовую тягу и скорость на плаву до 10 км/ч.

При преодолении береговой линии, имеющей неплотный грунт, водометы обладали значительным преимуществом перед винтами, так как сохраняли полную силу упора до момента отрыва днища от поверхности воды (практически этот момент наступал при выходе передних колес насушу). Более того, сила упора значительно росла с выходом струи водомета над поверхностью воды, что имело решающее значение во всей операции выхода на берег.

При движении по снежной целине автомобиль, имеющий низкое удельное давление в шинах (до 0,4 кг/см²), плоскую форму днища (с ребром а 165°) и дорожный просвет 500 мм, бездифференциальный привод, ликвидирующий пробуксовку колес, и гидродинамическую передачу, обеспечивающую «ползучие» скорости движения, плавную передачу крутящего момента без разрыва потока мощности и без срыва грунта, с легкостью преодолевал снег глубиной более 600 мм.

За счет отсутствия подвески ЗИЛ-135 был на 250 мм ниже ЗИЛ-134, что являлось важным не только для повышения маскировочных свойств, но и для уменьшения необходимого объема фунта, изымаемого при окапывании.
По требованиям военных
Большие успехи в повышении проходимости колесных автомобилей не остались незамеченными у военных. 21 ноября 1958 г. в Бронетанковой академии состоялся показ автомобилей ЗИЛ-134 и ЗИЛ-135 Н.С. Хрущеву, А.П. Кириленко, Л.И, Брежневу, Г.М. Маленкову и другим. В руководстве страны назревало решение о переводе гусеничных пусковых установок 2П16 ракетного тактического комплекса «Луна» на колесное шасси. 8 апреля 1959 г. вышло соответствующее постановление СМ СССР №378-180. Замена гусеничного шасси на колесное обосновывалась целым рядом факторов. Существенно увеличивались ресурс ходовой части и скорость движения по шоссе, дешевле становилась эксплуатация пусковой установки. Наконец, при движении по бездорожью и грунтовым дорогам гусеничные шасси сильно трясло. Эта тряска не причиняла вреда неуправляемой ракете ЗР-10, но негативно сказывалась на транспортировке спецзаряда.
13 ноября 1958 г. состоялось совещание в Главном Управлении Государственного комитета по оборонной технике (ГУ ГКОТ) по вопросу создания колесных шасси для ракетных пусковых установок завода «Баррикады». ОКБ завода «Баррикады» под руководством Георгия Ивановича Сергеева начало поиск колесного шасси под пусковую установку для ракетного комплекса «Луна». В качестве варианта рассматривалась возможность размещения пусковой установки на шасси автомобиля ЯАЗ-214, который значительно уступал гусеничному шасси по проходимости и скорости движения как по пересеченной местности, так и по снежной целине.
В январе 1959 г. на совещании в ВПК по результатам заводских испытаний был окончательно решен вопрос о переориентировании СКБ ЗИЛ с проекта ЗИГИ34/134А на ЗИЛ-135. Вышел приказ об изготовлении на заводе им. И.А. Лихачева трех доработанных плавающих транспортеров под обозначением ЗИЛ-135Б для проведения государственных испытаний.
26 января 1959 г. главный конструктор ОКБ завода «Баррикады» Г.И. Сергеев прибыл в Москву. В Министерстве обороны ему посоветовали заехать на московский завод ЗИЛ к главному конструктору СКБ В.А Грачеву. Каково же было удивление Георгия Ивановича, когда у заводской проходной из ворот завода ему навстречу выехал ЗИЛ-135. Эта машина нпопне устраивала Сергеева: четырехосный тягач на больших шинах с регулируемым давлением по проходимости не уступал гусеничному шасси, а размеры бортовой платформы позволяли разместить баллистическую установку.
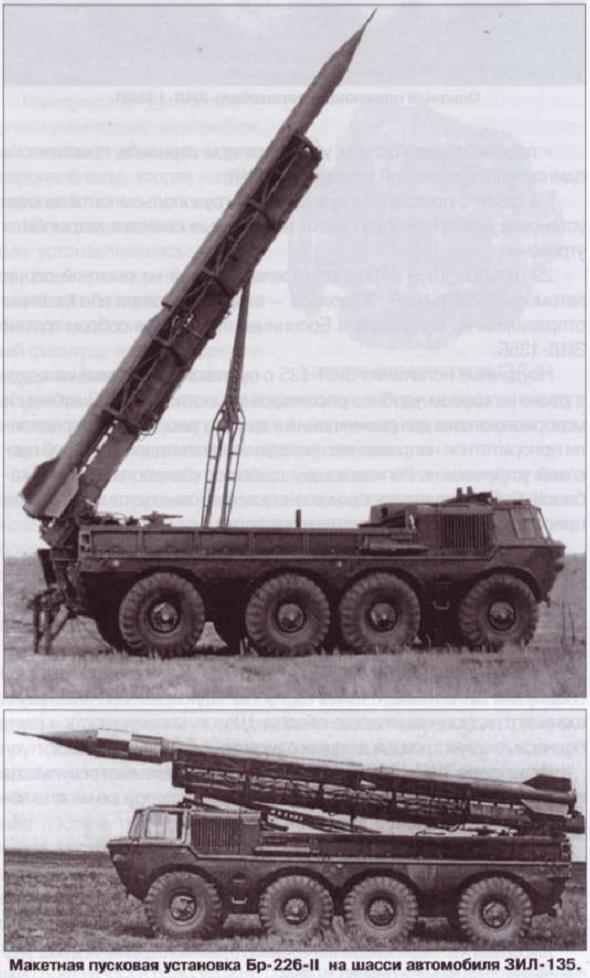
10—11 февраля 1959 г. в СКБЗИЛ прибыла целая группа конструкторов и специалистов ОКБ завода «Баррикады», где обсуждались тактико-технические требования колесной пусковой установки для комплекса «Луна», вопросы подготовки и передачи автомобиля ЗИЛ-135 для оснащения его баллистической установкой. 6-9 мая с ответным визитом завод «Баррикады» посетила делегация конструкторов СКБ ЗИЛ, и уже 28 мая автомобиль ЗИЛ-135 своим ходом прибыл в Сталинград. Пусковая установка Бр-226-ll (индекс ГРАУ — 2П21) была собрана в Сталинграде в ОКБ завода «Баррикады» всего за месяц. На ЗИЛ-135 была наложена баллистическая установка С-123А.

С 23 июня по 3 июля 1959 г. пусковая установка Бр-226-ll проходила ходовые испытания в Прудбое на полигоне в излучине Дона. Из-за высокого центра тяжести баллистической установки машина при попытке плыть по Дону чуть не перевернулась. Затем Бр-226-Н отправили на полигон Калустин Яр, где 23-24 июля провели три пуска ракет.
По результатам испытаний было установлено, что:
- пусковая установка с задними домкратами и опорами под передней осью с сухого твердого грунта имеет достаточную устойчивость;
- перемещение корпуса установки при стрельбе практически одинаково с гусеничной установкой 2П16;
- в связи с превышением расчетной грузоподъемности за счет установки артиллерийской части водоходные качества автомобиля утрачены.
29 октября 1959 г. был изготовлен первый из опытной серии автомобиль ЗИЛ-135Б, 20 ноября — второй, и вскоре обе машины отправились на испытания в Бронницы. 10 декабря собран третий ЗИЛ-135Б.
Неудачные испытания ЗИЛ-135 с пусковой установкой на воде, а также не совсем удобное расположение металлической кабины и моторного отсека для размещения и запуска ракеты предопределили приоритетное направление — создание самоходной колесной пусковой установки на неплавающем шасси со стеклопластиковой кабиной. Работы по плавающим колесным пусковым установкам были приостановлены и впоследствии свернуты.
С корпусом из стеклопластика
Однако история ЗИЛ-135Б не завершилась. Для определения возможности создания крупногабаритных водоизмещающих корпусов из стеклоппастика 5 июля 1962 г, был собран автомобиль, получивший неофициальное обозначение ЗИП-135БП (где «П» означало пластмассовый} или ЗИЛ-135Б2, с таким корпусом. Одновременно были улучшены его гидродинамические обводы. Шасси, ходовую часть и раму полностью заимствовали от одного из разобранных ЗИП-135Б.

Испытания ЗИП- 135БП на воде дали положительные результаты и подтвердили возможность создания крупных корпусов из стеклопластика для плавающих автомобилей.
источник: Е.И. Прочко, Р.Г. Данилов "АВТОМОБИЛИ ДЛЯ БЕЗДОРОЖЬЯ. Плавающий транспортер ЗИЛ-135Б" Техника и Вооружение 10/2009